注意
-
如果在启用或禁用合规性控制时外部扭矩高于阈值,机械手会因JTS (接头扭矩传感器)错误而停止程序。
-
无论外部扭矩大小如何,都可以执行刚度更改。
-
在顺应性控制期间,无法执行MoveJ命令等关节运动。
|
JTS错误阈值(Nm) |
||||||
|
型号 |
J1 |
J2 |
J3 |
J4 |
J5 |
J6 |
|---|---|---|---|---|---|---|
|
E0509 |
15 |
15 |
15 |
15 |
15 |
15 |
-
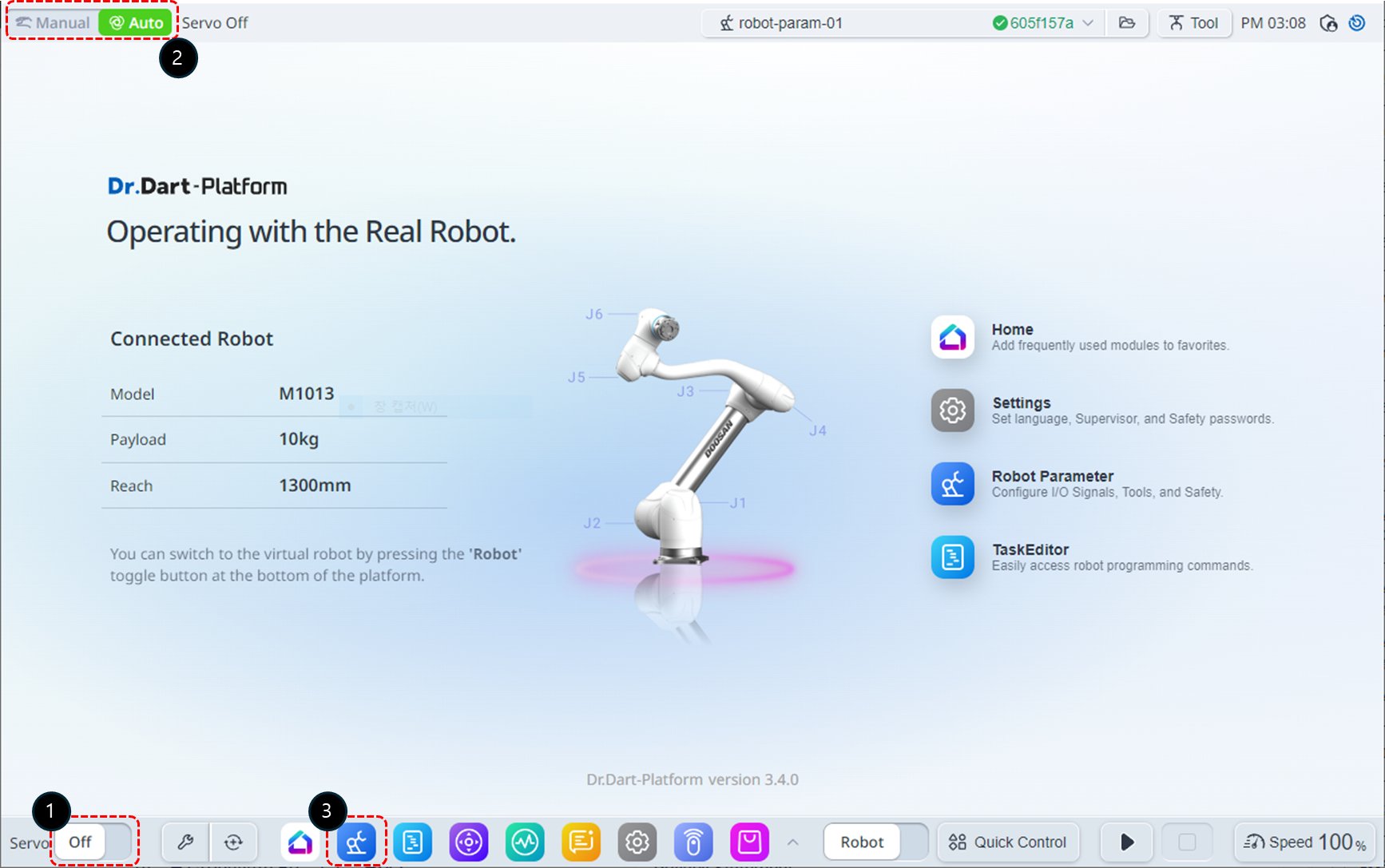
将伺服状态更改为开。
-
将操作模式更改为手动。
-
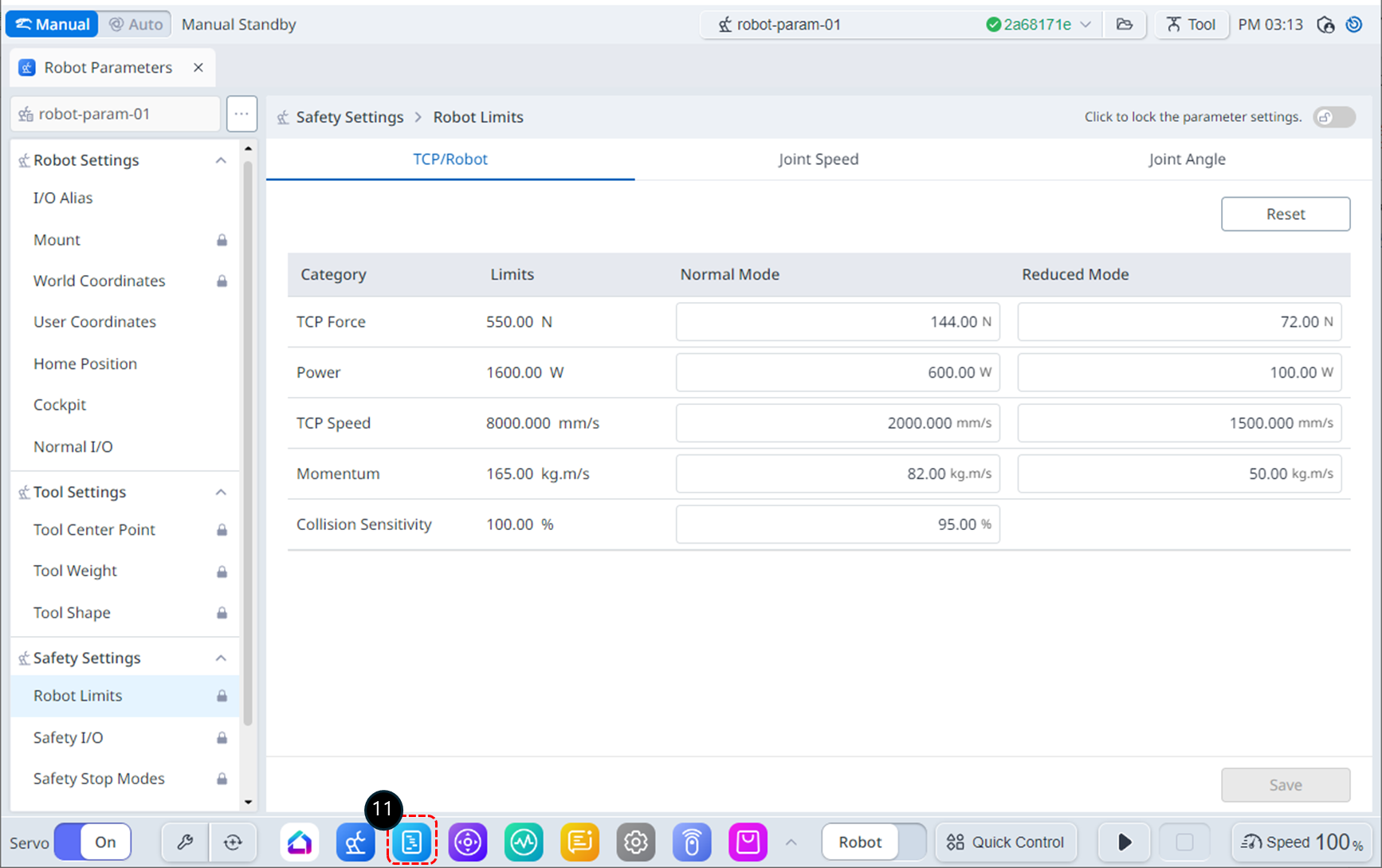
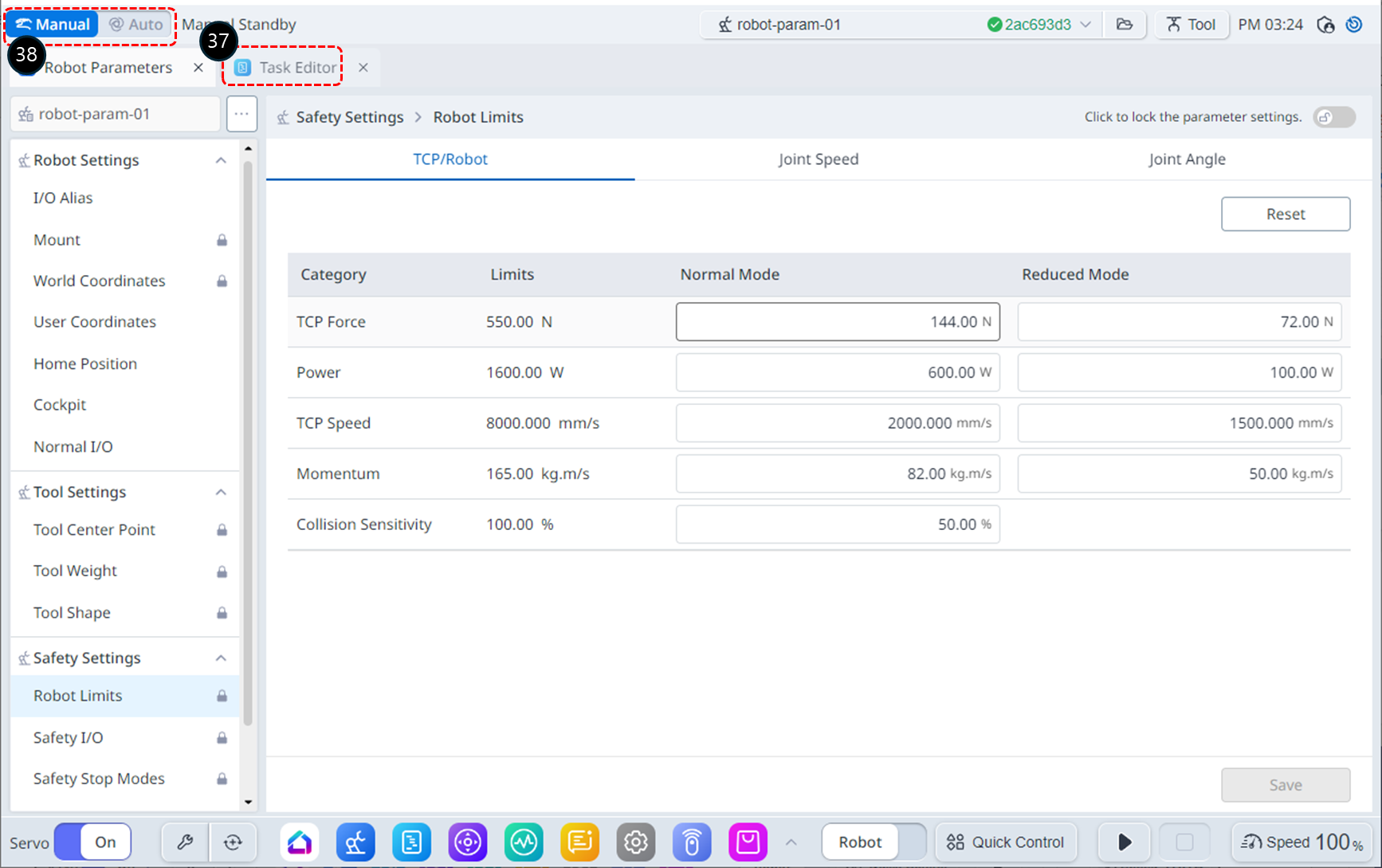
从底部菜单中选择机械手参数模块。在此示例中,碰撞灵敏度设置为95%,以解释在使用合规性控制时降低碰撞灵敏度的原因。
-
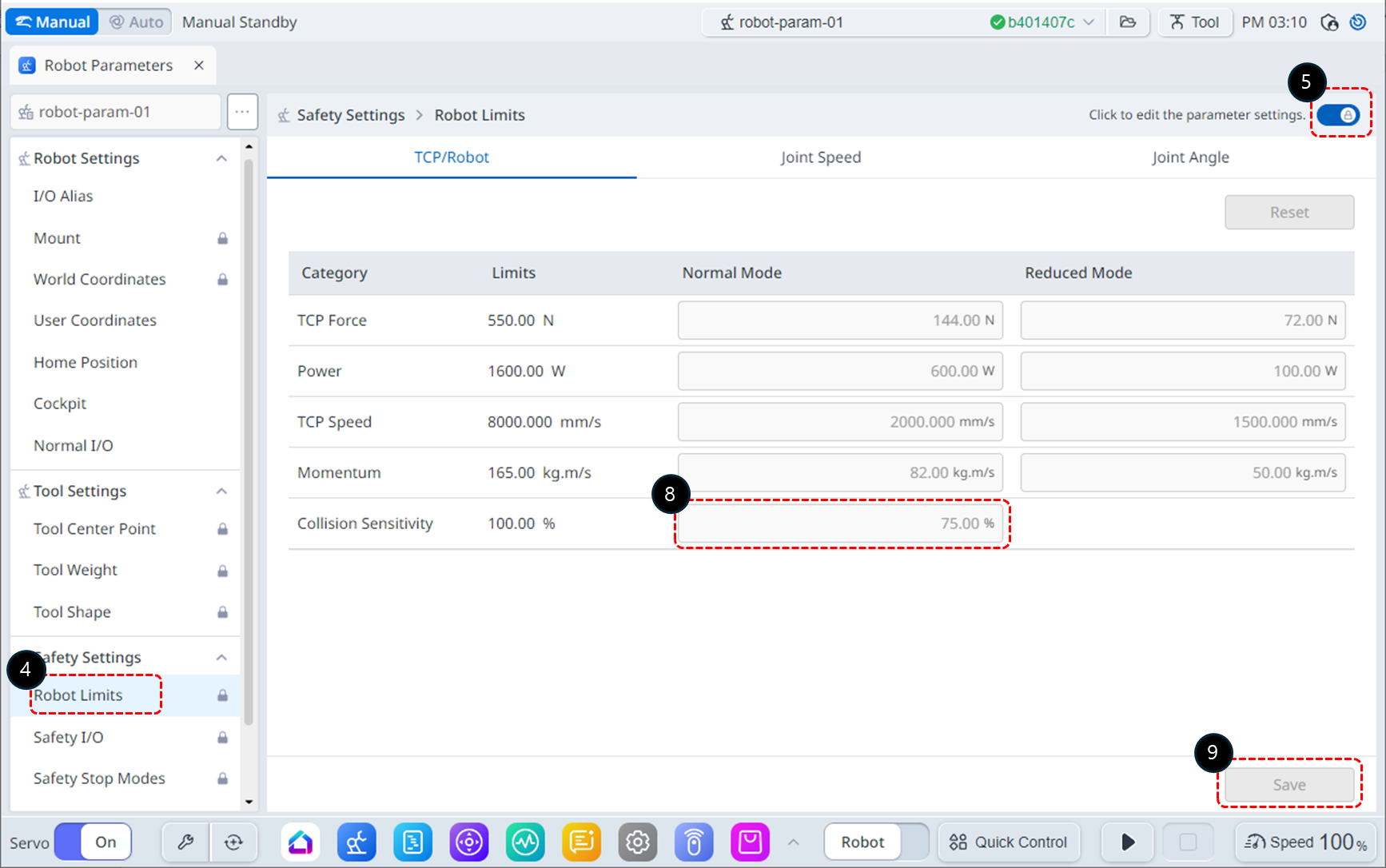
从安全设置中选择机械手限制。
-
启用参数编辑状态。
-
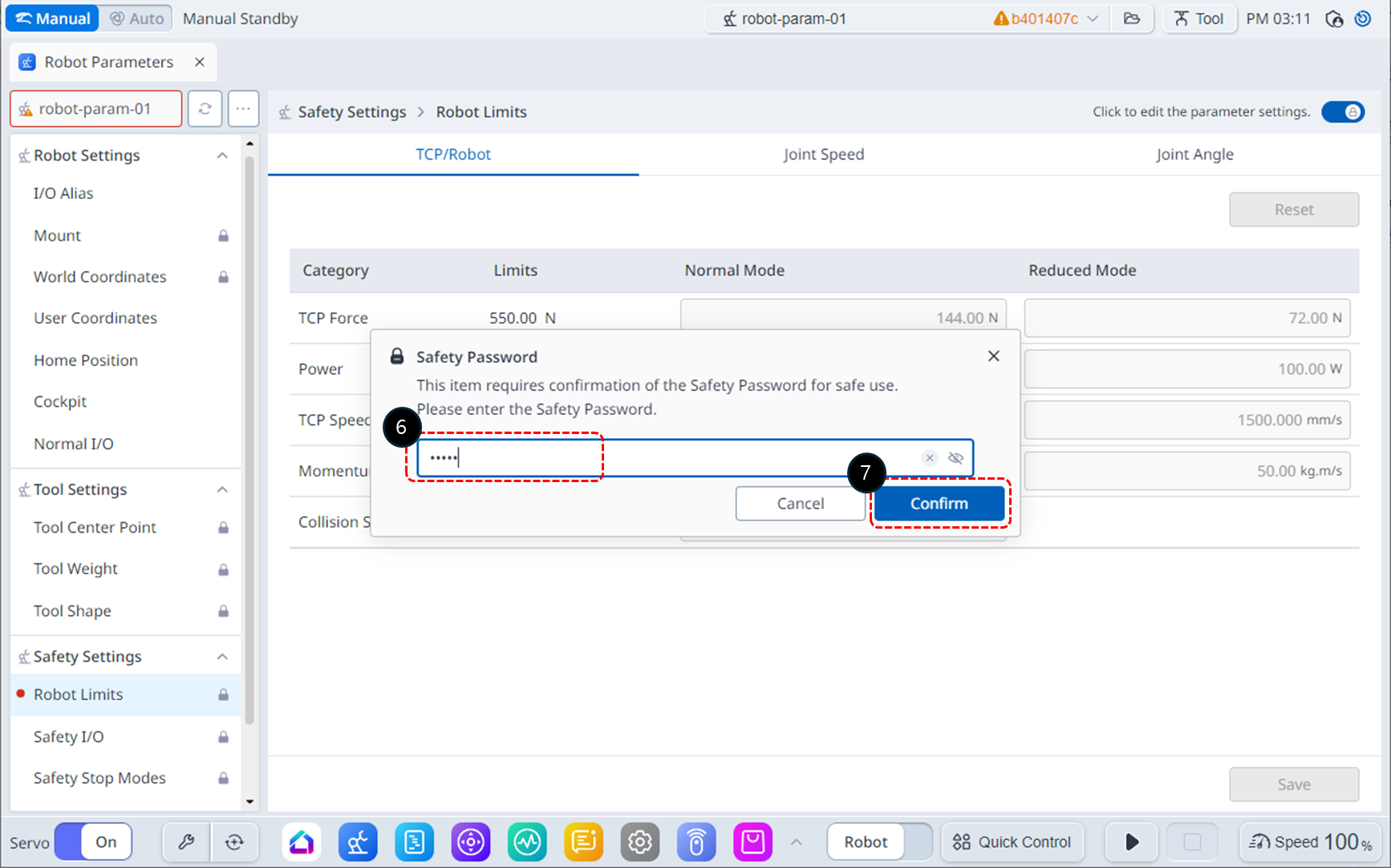
如果出现密码输入窗口,请输入安全密码(默认安全密码:admin)。
-
单击"Confirm (确认)"按钮。
-
将碰撞灵敏度修改为95%。
-
单击保存按钮以保存设置。
-
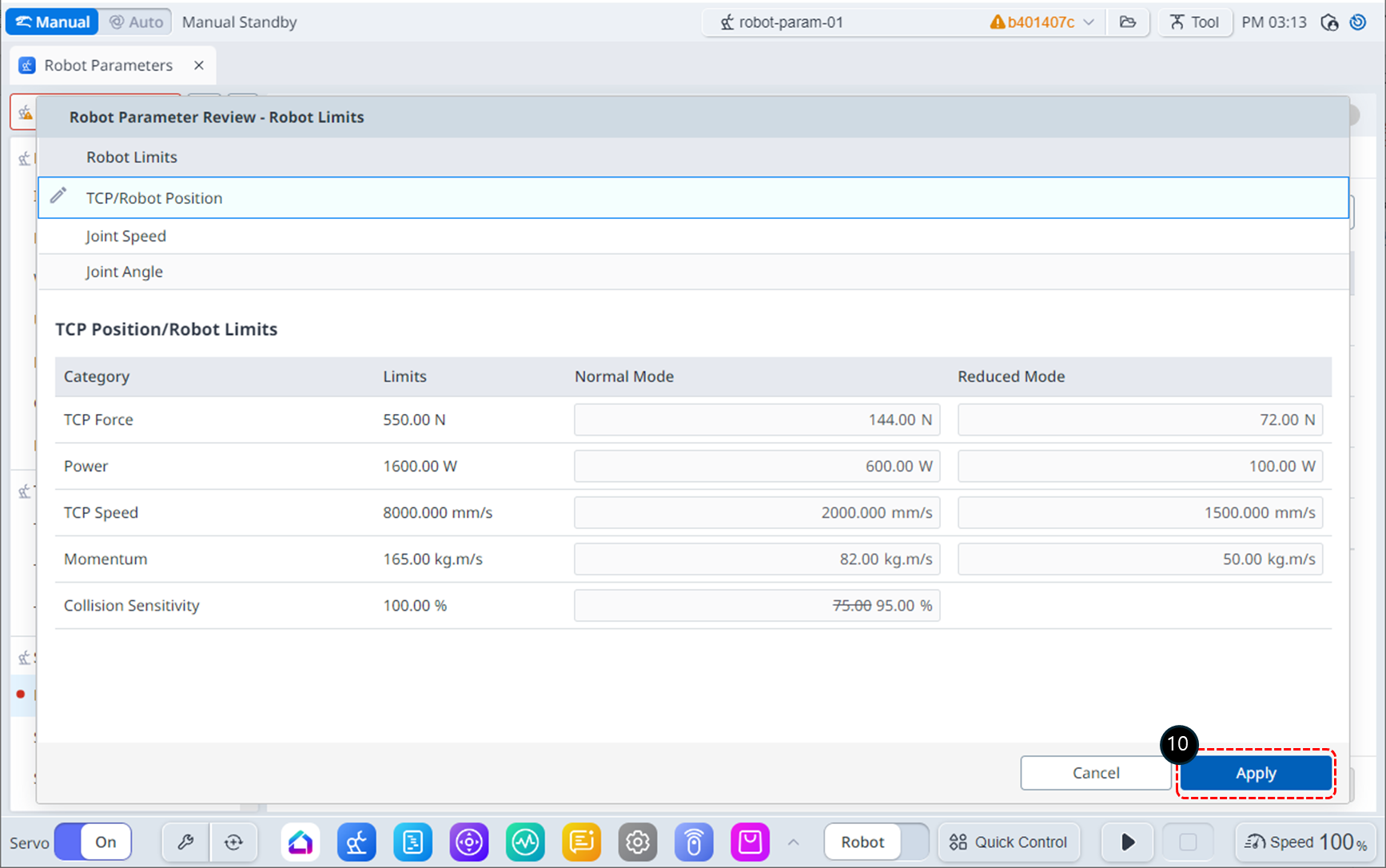
查看更改后,单击Apply (应用)按钮。
-
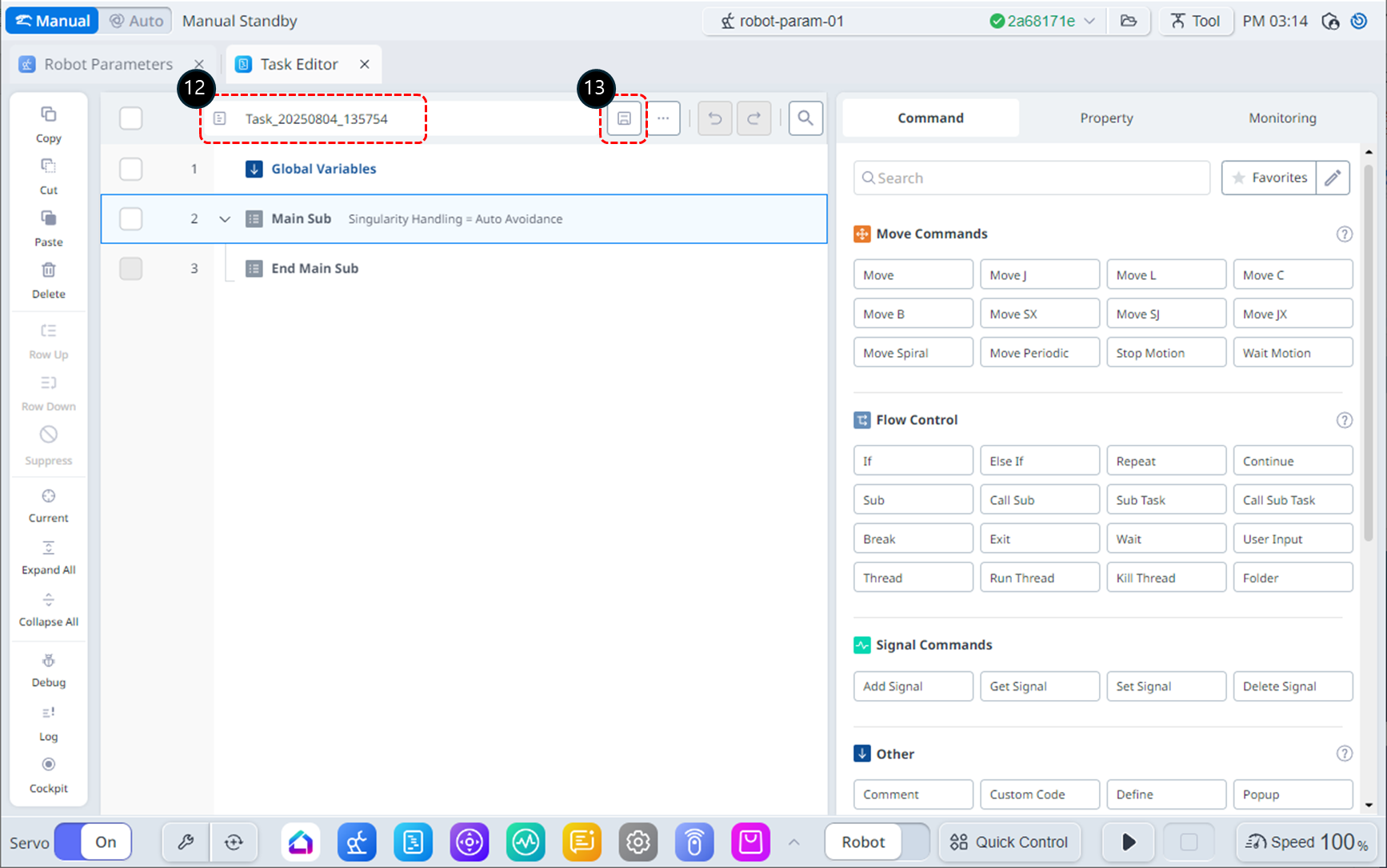
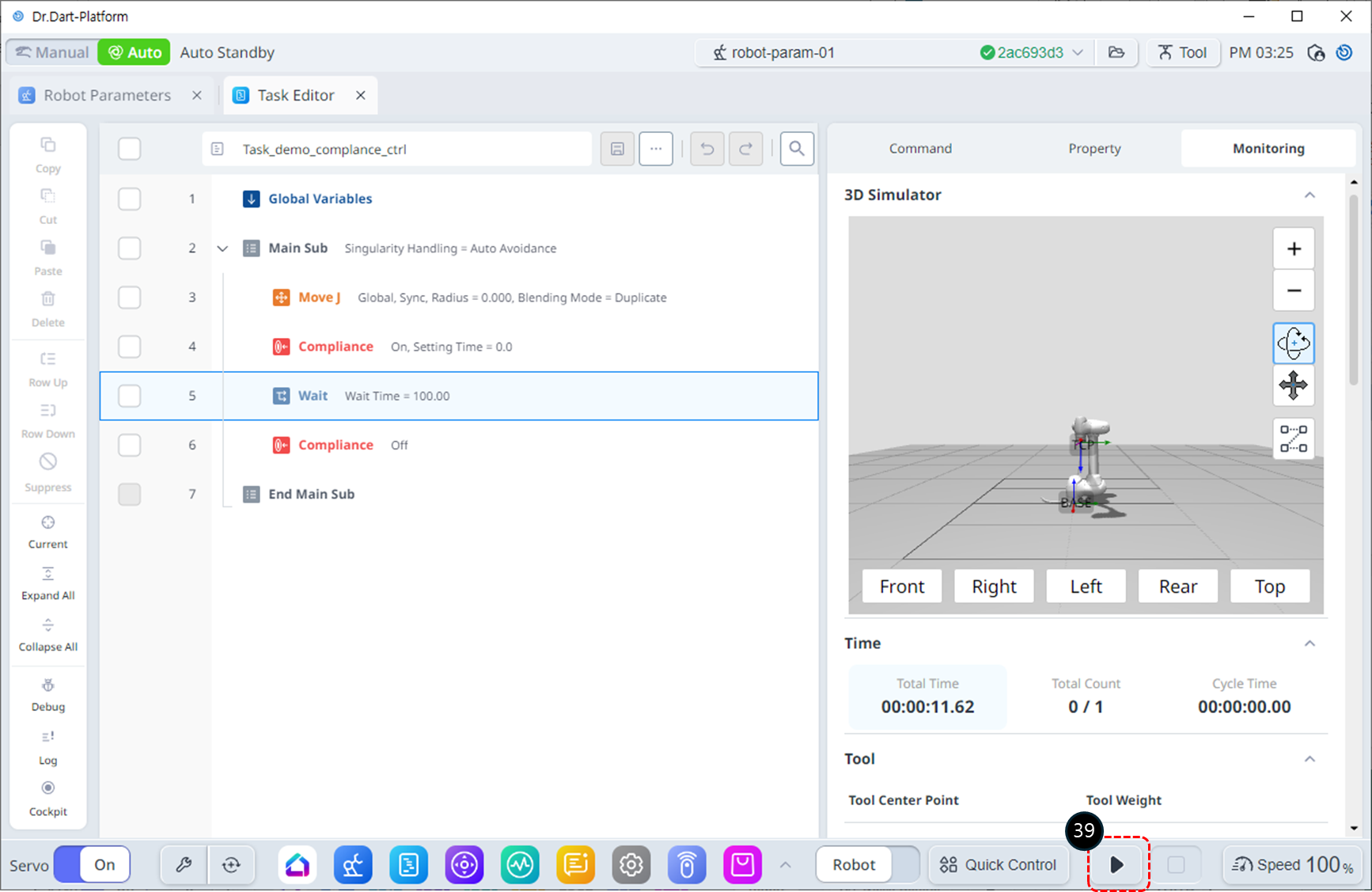
从底部菜单中选择任务编辑器模块。
-
将任务重命名为 Task_demo_complexscripts_Ctrl。
-
保存更新后的任务名称。
-
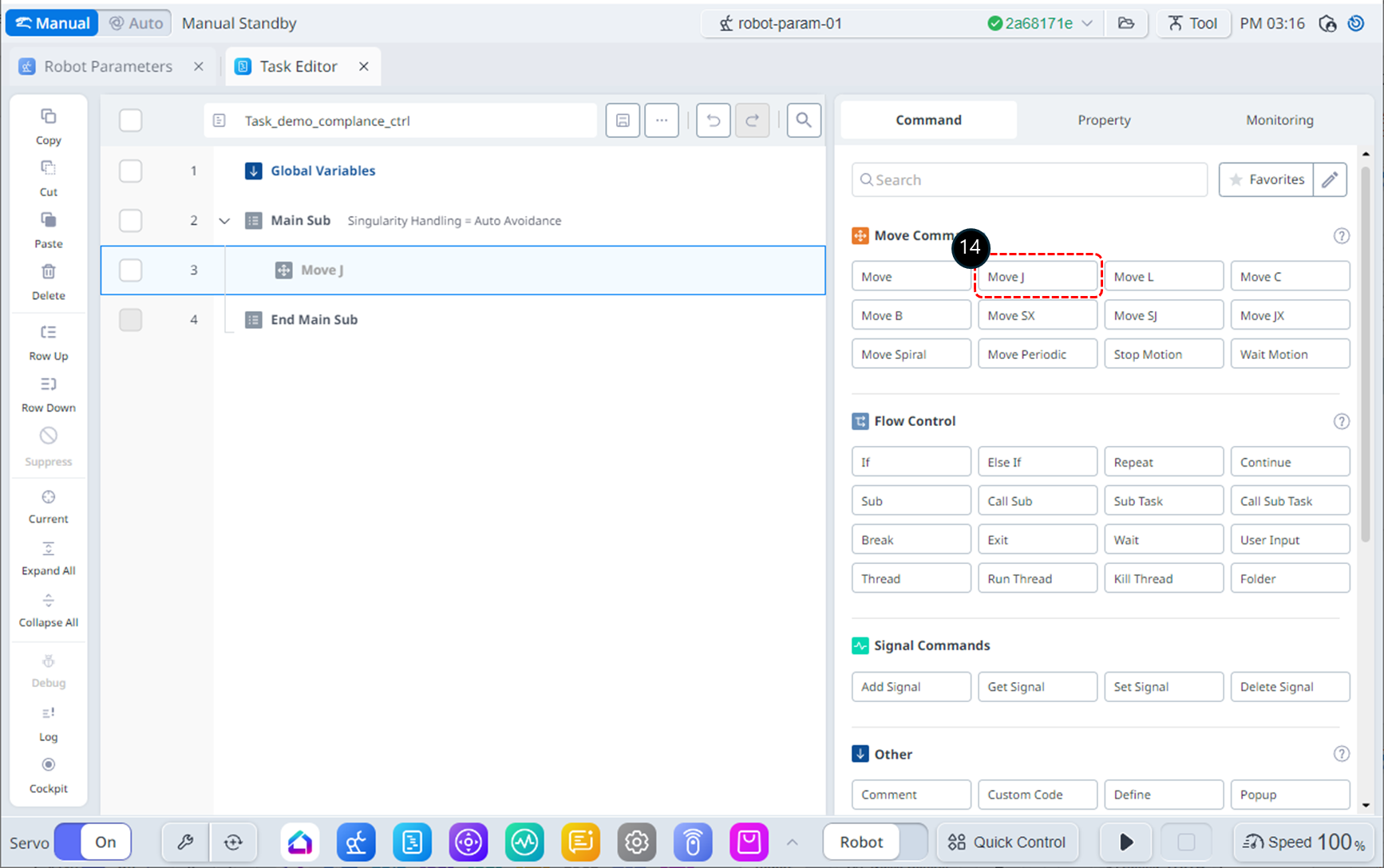
添加MoveJ命令。此命令将用于将机械手移至起始位置以进行合规性控制。
-
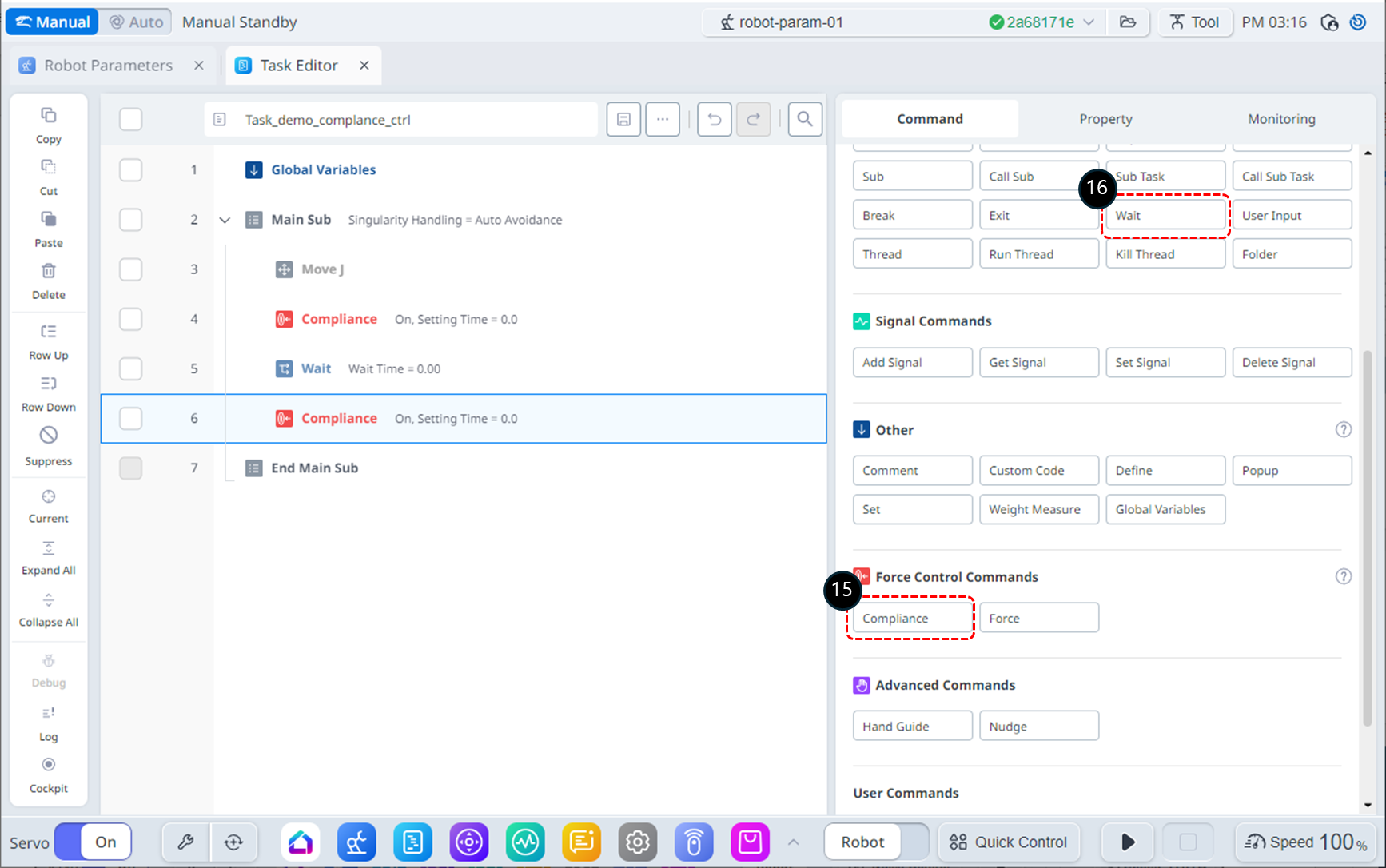
添加两个合规性命令。这些命令将用于激活和停用合规性控制。
-
在合规性命令之间插入等待命令。此等待命令将用于维护合规性控制。
-
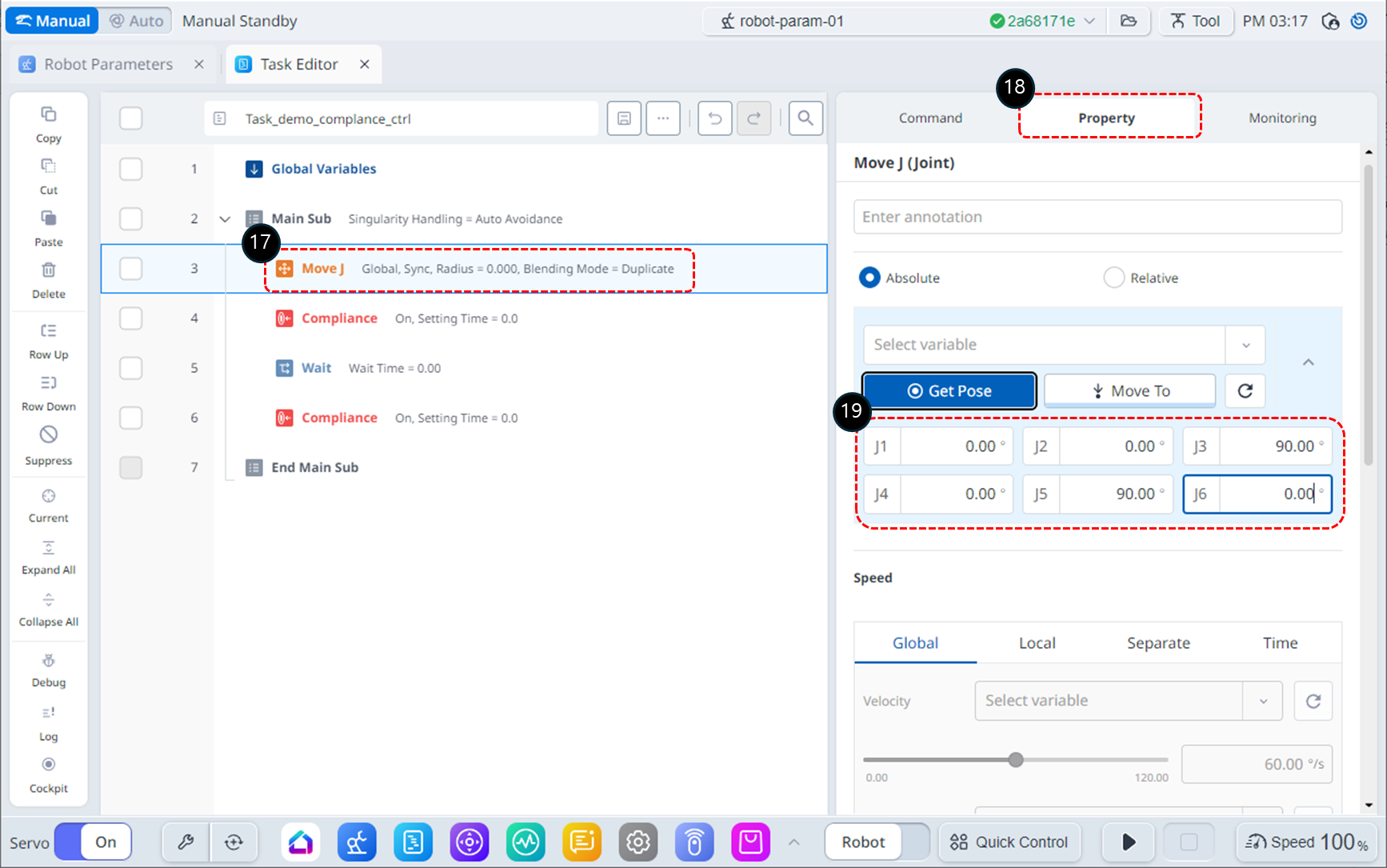
选择第3行上的MoveJ命令。
-
选择"属性"选项卡。
-
将MoveJ的目标位置修改为(0,0,90,0,90, 0)度 根据机器人的安装空间, J1的角度可以根据需要进行调整。
-
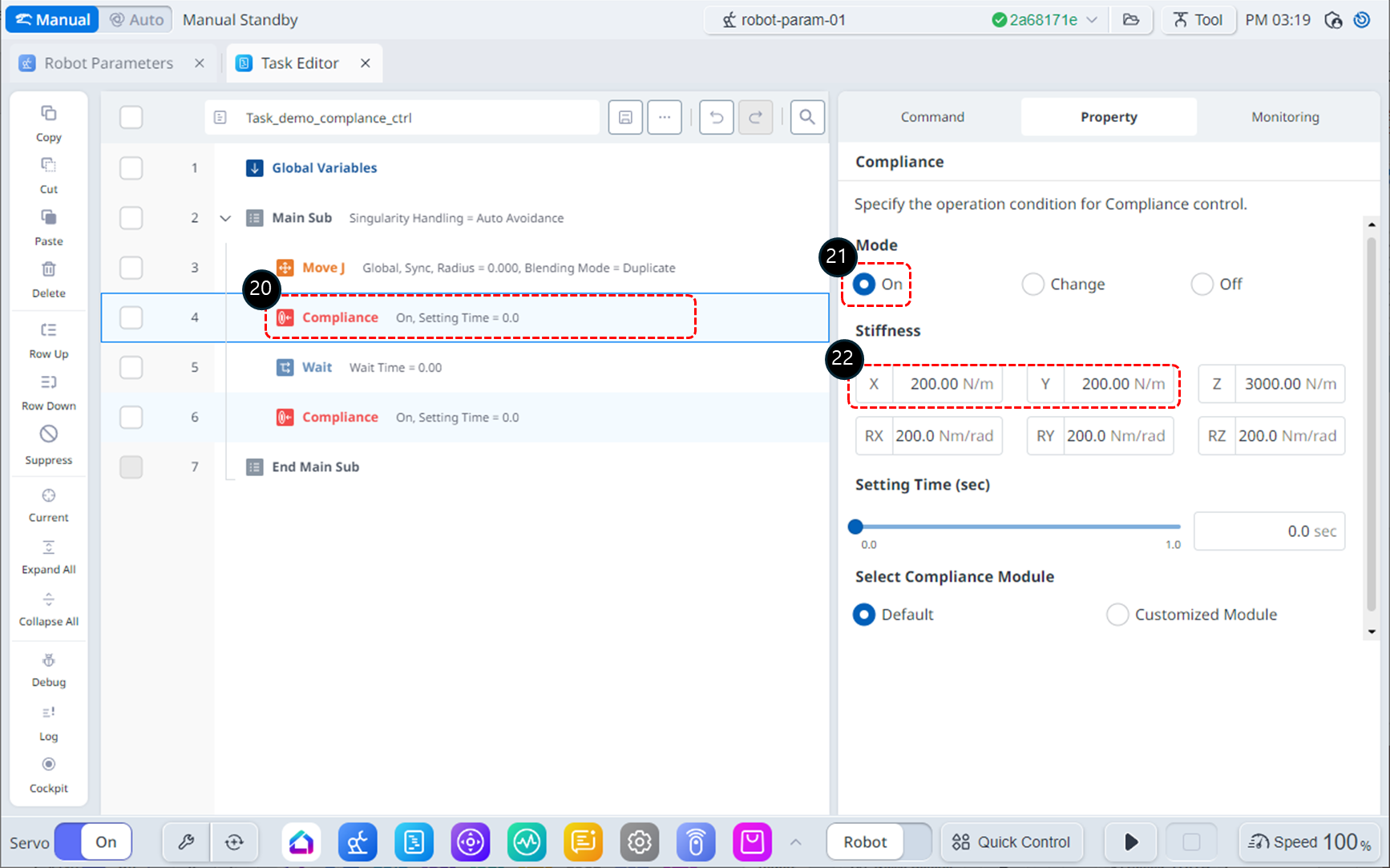
选择第4行上的"合规性"命令。
-
在属性选项卡中,按如下所示设置模式:打开模式可激活合规性控制。
-
模式:开
-
-
按如下所示设置刚度:降低X和Y方向的刚度,使机器人在这些方向上的响应更柔和。
-
X:200牛/米
-
Y:200牛/米
-
Z:3000 N/m (默认)
-
Rx, Ry, Rz:200 Nm/rad (默认)
-
-
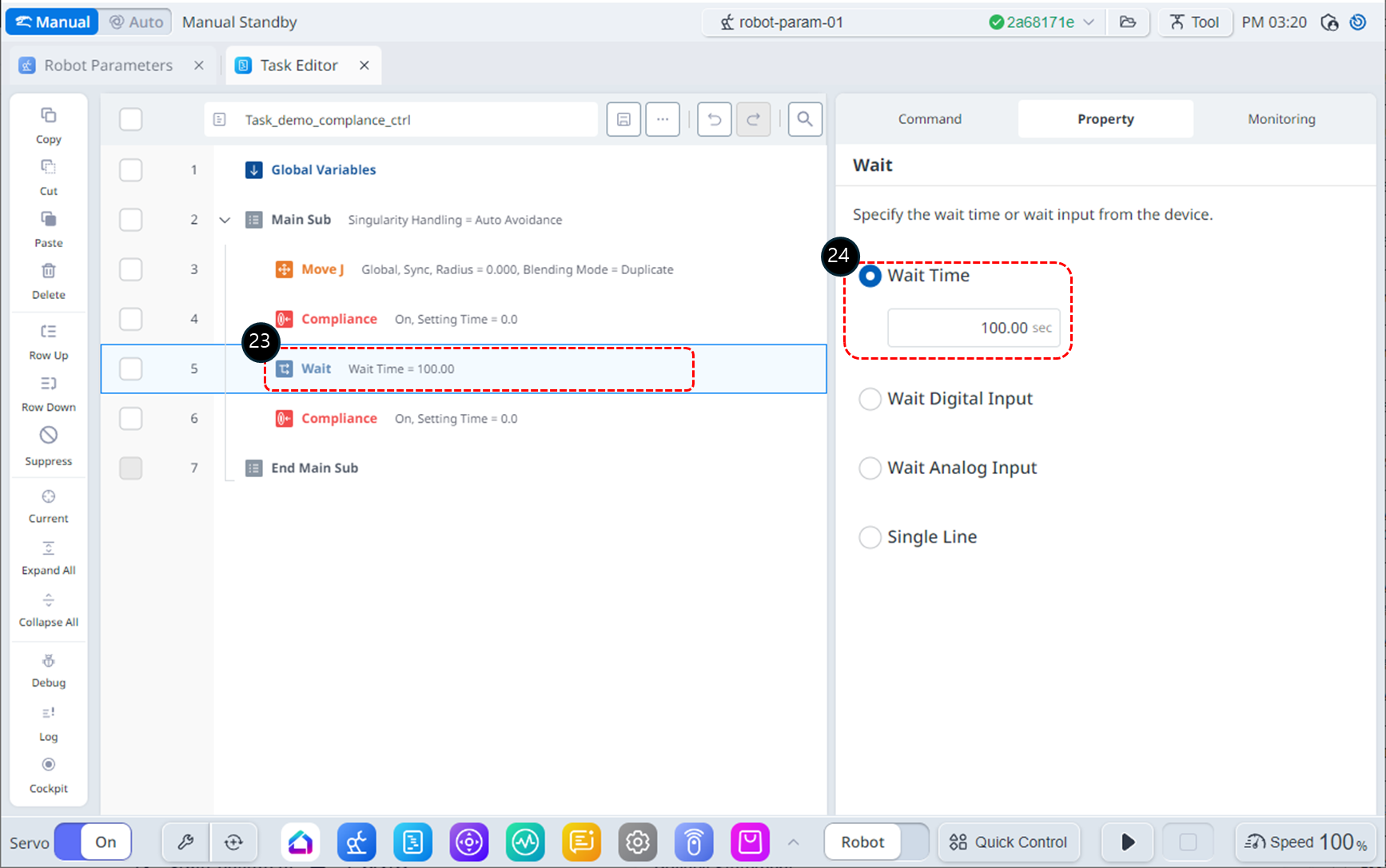
选择第5行的Wait命令。
-
按如下所示设置等待时间。
-
等待时间:100秒
-
-
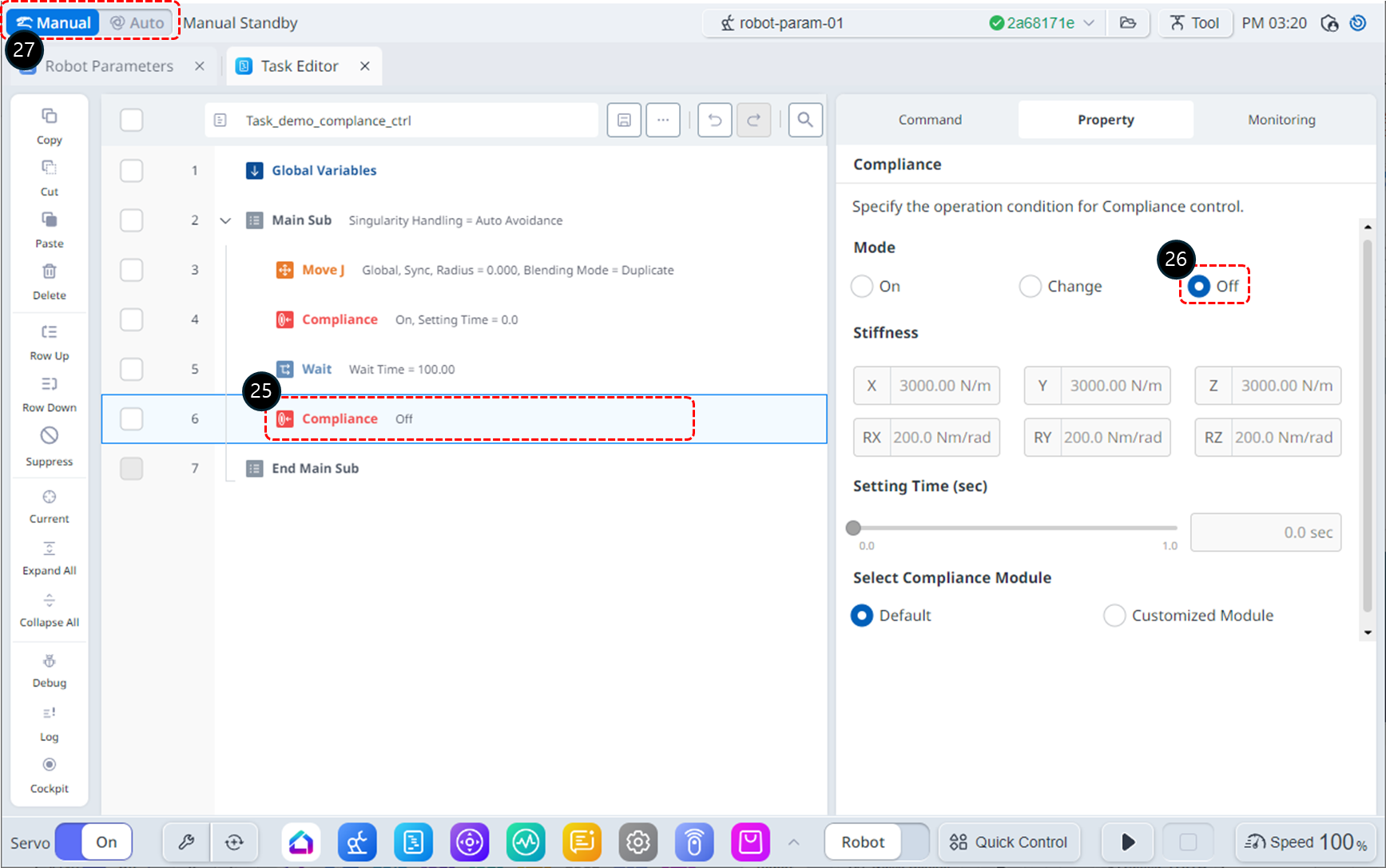
选择第6行上的"合规性"命令。
-
在属性选项卡中,按如下所示设置模式:关闭模式将停用合规性控制。
-
模式:关闭
-
-
将操作模式更改为自动。"属性"选项卡将自动切换到"监视"选项卡。

-
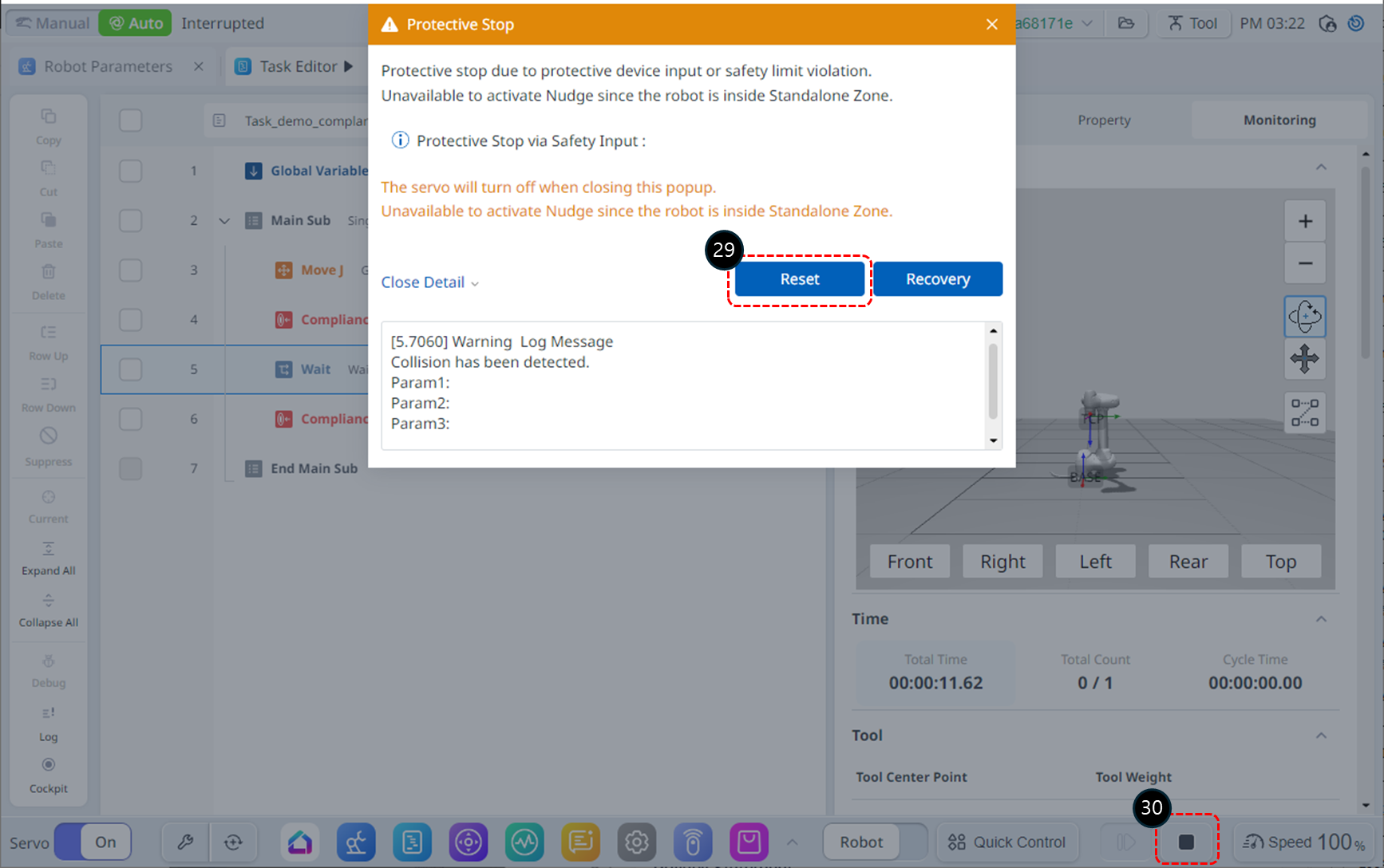
单击"Run (运行)"按钮。机械手将移至初始位置,启动合规性控制,并保持静止100秒。在此期间,将机械手的末端执行器轻轻推向机械手的身体。机器人将因碰撞错误(或TCP力限制错误)而停止。在碰撞导致的安全停止状态下,机械手的LED将显示黄色。
-
单击安全停机警告窗口上的重置按钮。任务程序将恢复操作。
-
单击停止按钮终止程序。
-
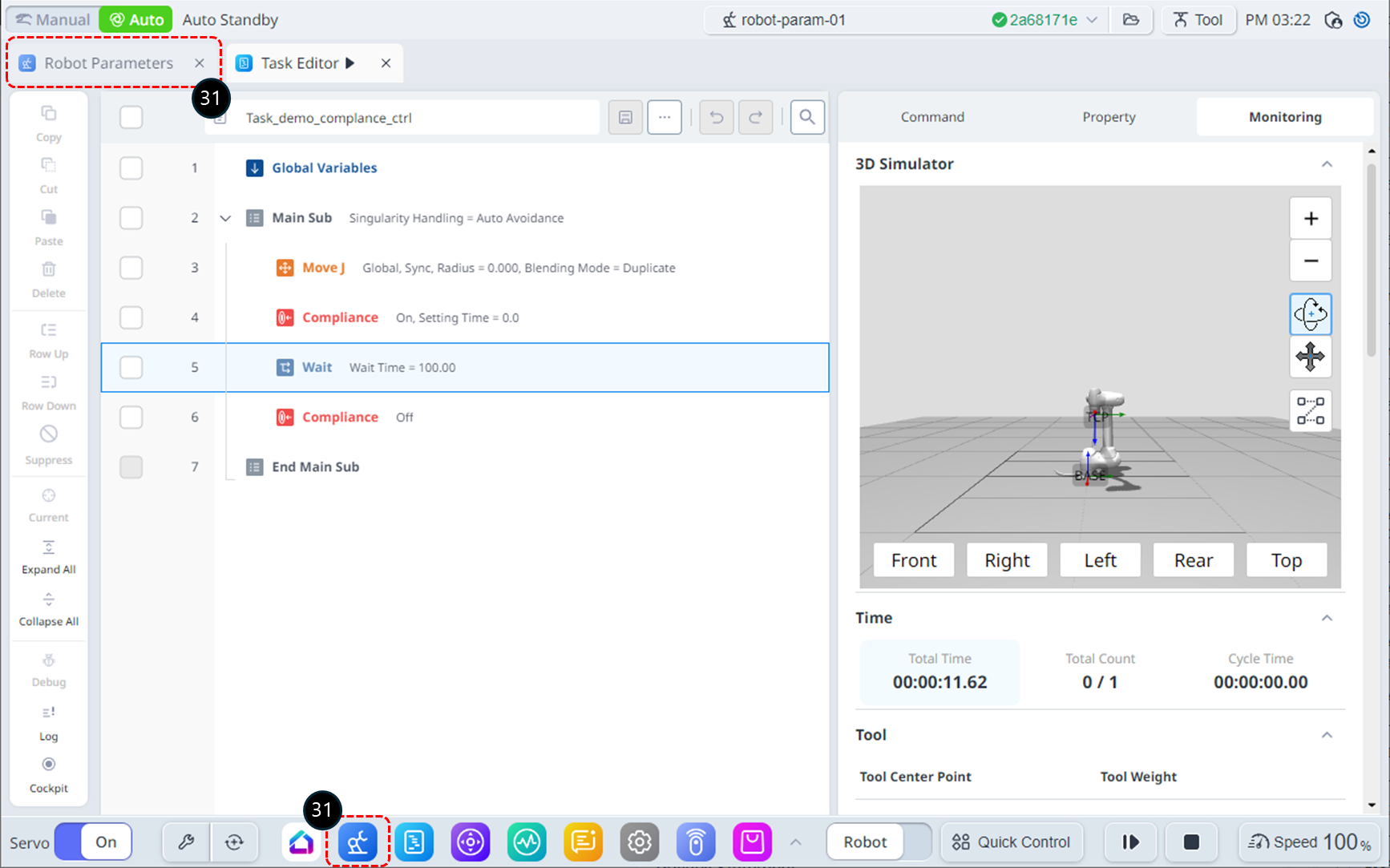
要解决碰撞问题,应降低安全设置中的碰撞灵敏度。(如果存在TCP强制限制问题,则应增加TCP强制参数。)从底部菜单中选择机械手参数模块。或者,您可以选择左上角的"机械手参数"模块选项卡,其工作原理相同。
-
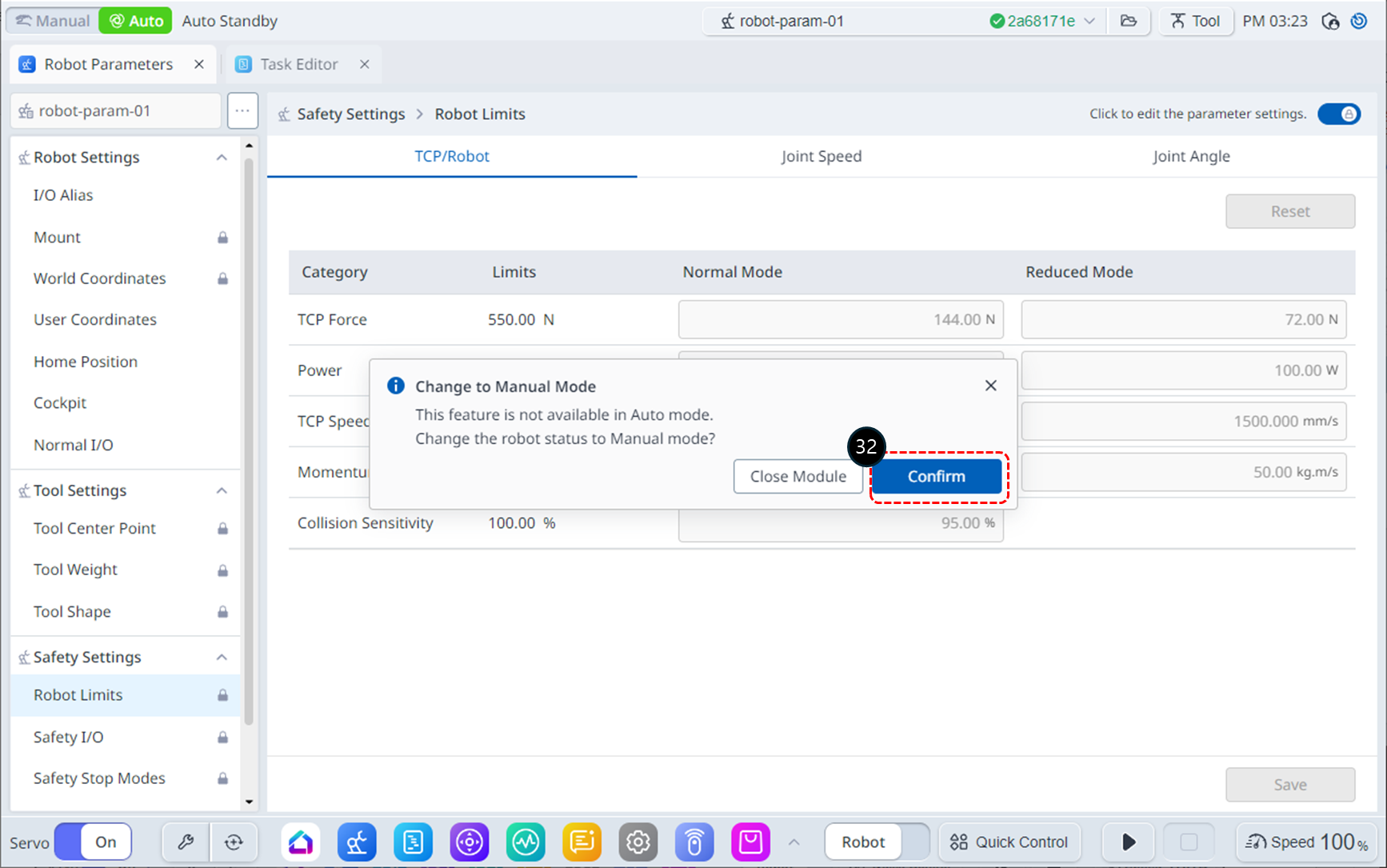
在自动模式下,访问机械手参数模块将触发通知窗口。单击Confirm (确认)按钮切换到Manual (手动)模式。
-
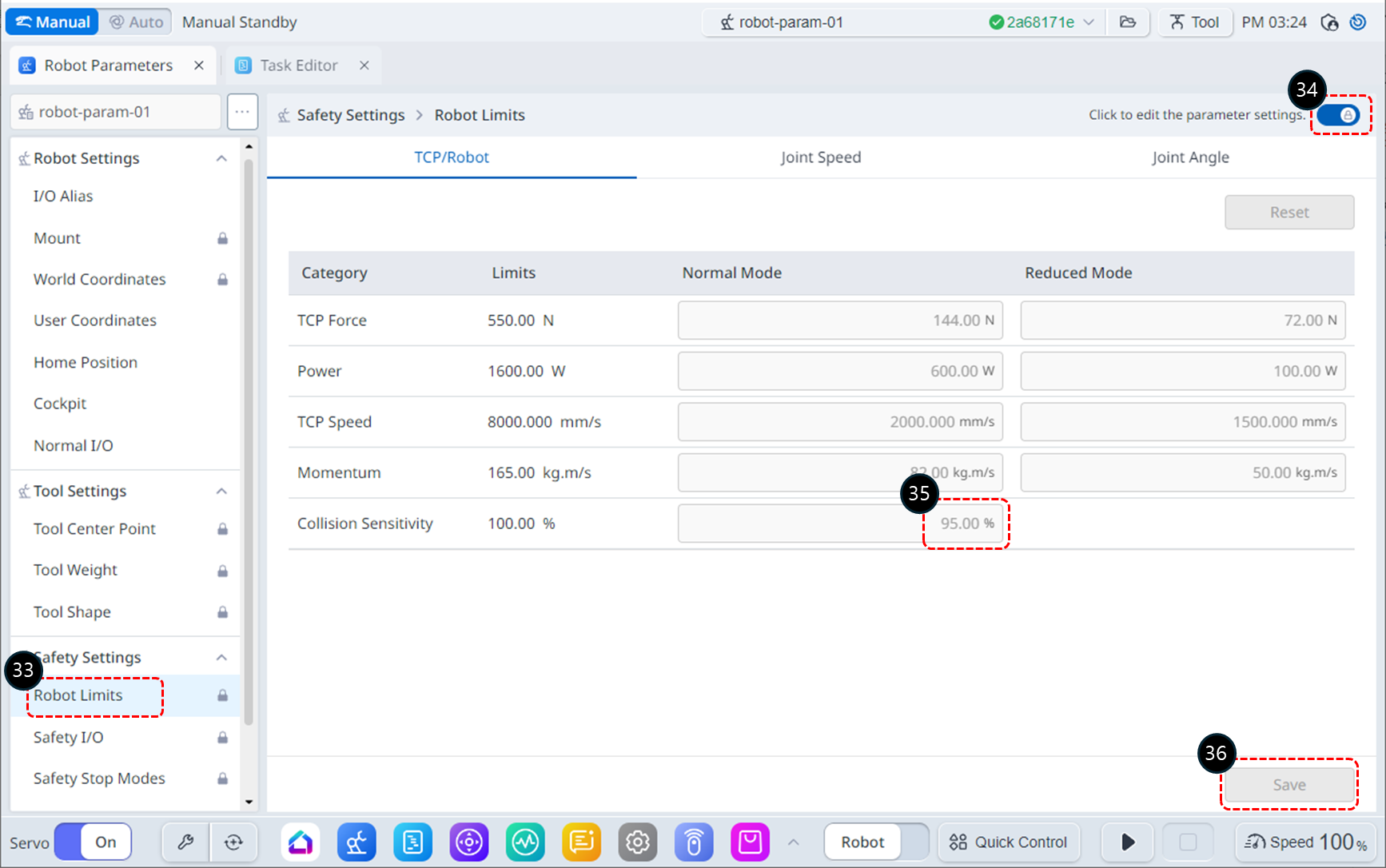
从安全设置中选择机械手限制。
-
启用参数编辑状态。如果出现密码输入窗口,请参阅步骤6–7。
-
将碰撞灵敏度修改为50%。
-
单击保存按钮以保存设置。如果出现"Robot Parameters Review (机械手参数回顾)"窗口,请查看修改并单击"Apply (应用)"按钮。
-
选择任务编辑器模块选项卡。
-
切换到自动模式以执行任务程序。
Unknown Attachment
-
单击"Run (运行)"按钮。在等待时间内, 轻轻地将机械手的末端执行器推向机械手的身体。机器人会在推力的作用下移动, 一旦您松开手, 它就会返回到原来的位置。