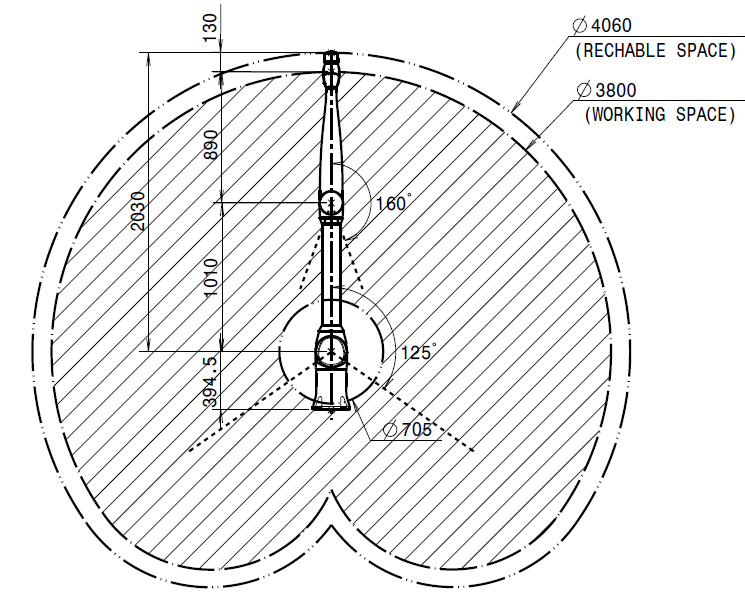
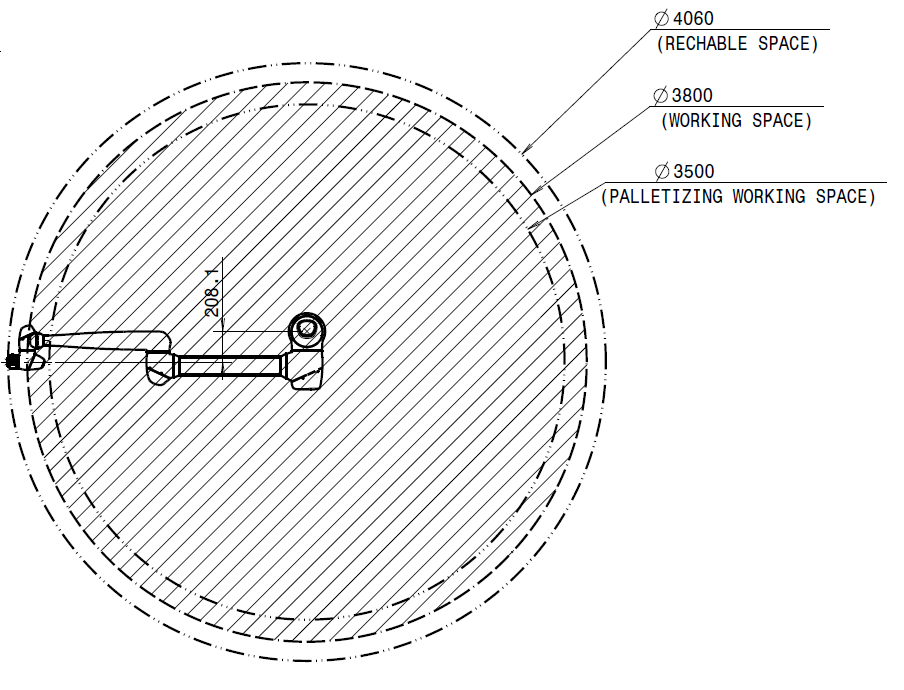
机械手操作空间
P3020
|
|
|---|
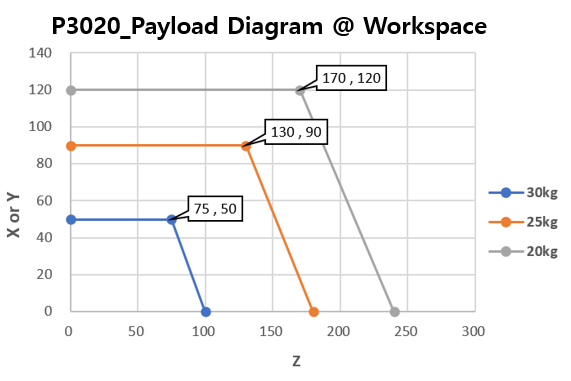
最大 工作空间内的有效载荷
机器人在其工作空间内的最大有效载荷根据与重心的距离而变化。每个距离的有效载荷如下:
注意
此载荷图假定刀具载荷体积较小。与重量相等但体积较小的刀具相比,体积较大的刀具在重心以上的有效载荷限制更大,在这种情况下,可能会发生振动。
P3020
允许的力矩和惯性
J4-J6机器人允许的力矩和惯性如下所示:
|
型号名称
|
J4 |
J5 |
J6 |
|||
|---|---|---|---|---|---|---|
|
允许的时刻 |
惯性 |
允许的时刻 |
惯性 |
允许的时刻 |
惯性 |
|
|
P3020 |
- |
- |
55牛米 |
3.1千克㎡ |
36牛米 |
2.0千克㎡ |
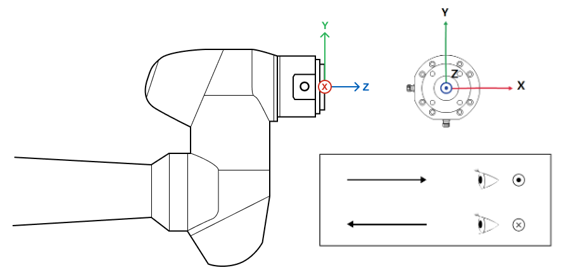
工具中心点(TCP)
有关TCP,请参阅下图。
基本规格
|
型号名称 |
P3020 |
|---|---|
|
重量 |
83公斤 |
|
工作半径内的有效负载 |
30公斤 |
|
最大 工作半径 |
1900毫米 |
|
轴数 |
5 |
|
最大 TCP速度 |
超过1 m/s |
|
位置重复性(ISO 9283) |
±0.1毫米 |
|
保护等级 |
IP 54 |
|
噪音 |
< 65 dB |
|
安装方向 |
仅限地板 |
|
控制器和教学手控盒 |
斗山控制器和教学吊坠 |
|
振动和加速度 |
10≤f㎐ - 0.075mm振幅 57≤f≤150㎐ –1G |
|
影响 |
最大振幅:50㎨(5G)
|
|
工作温度 |
0 ℃ ~45 ℃ (273K至318K) |
|
存储温度 |
-5 ℃ ~50 ℃ (268K至323K) |
|
湿度 |
20%~ 80% |
轴规格
|
型号名称 |
P3020 |
|---|---|
|
操作角度 |
|
|
J1 |
±360° (TP:±360°) |
|
J2 |
±125° (TP:±95°) |
|
J3 |
±160° (TP:±135°) |
|
J4 |
- |
|
J5 |
±360° (TP:±135°) |
|
J6 |
±360° (TP:±360°) |
|
最大 每轴转速(额定有效负载操作) |
|
|
J1 |
100 °/s |
|
J2 |
80 °/s |
|
J3 |
80 °/s |
|
J4 |
- |
|
J5 |
200 °/s |
|
J6 |
360 °/s |