
设置和使用扩展协议
扩展协议- PROFINET IO设备(PNIO设备)设置
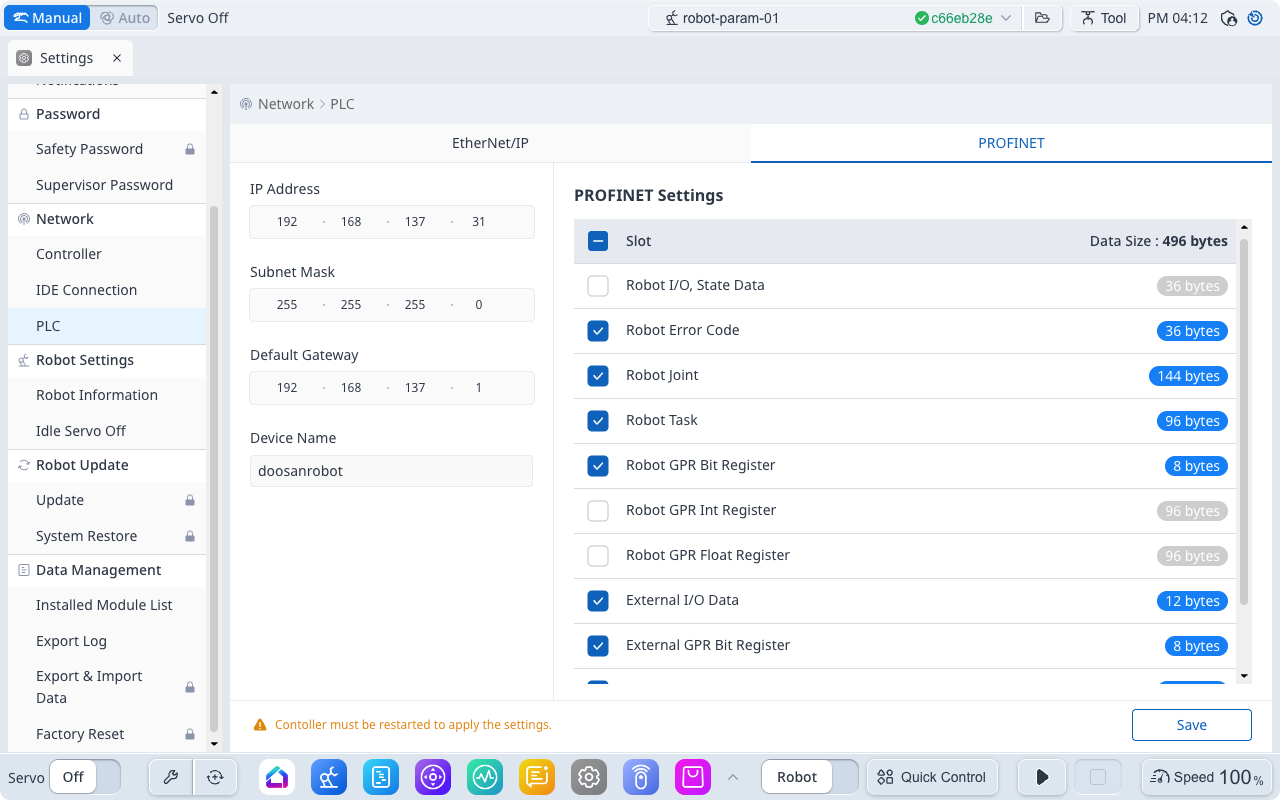
斗山机器人的机器人控制器支持PROFITNET IO设备(Slave)功能,该功能允许在从外部设备(PROFINET IO控制器/主控制器)读取机器人参数后修改数据。(例如,机器人参数监控,通用寄存器(位,内部,浮动)– 使用通用寄存器(GPR))
注)有关PROFINET的更多信息,请访问 http://www.profibus.com
扩展协议-以太网/IP适配器(EIP适配器)设置
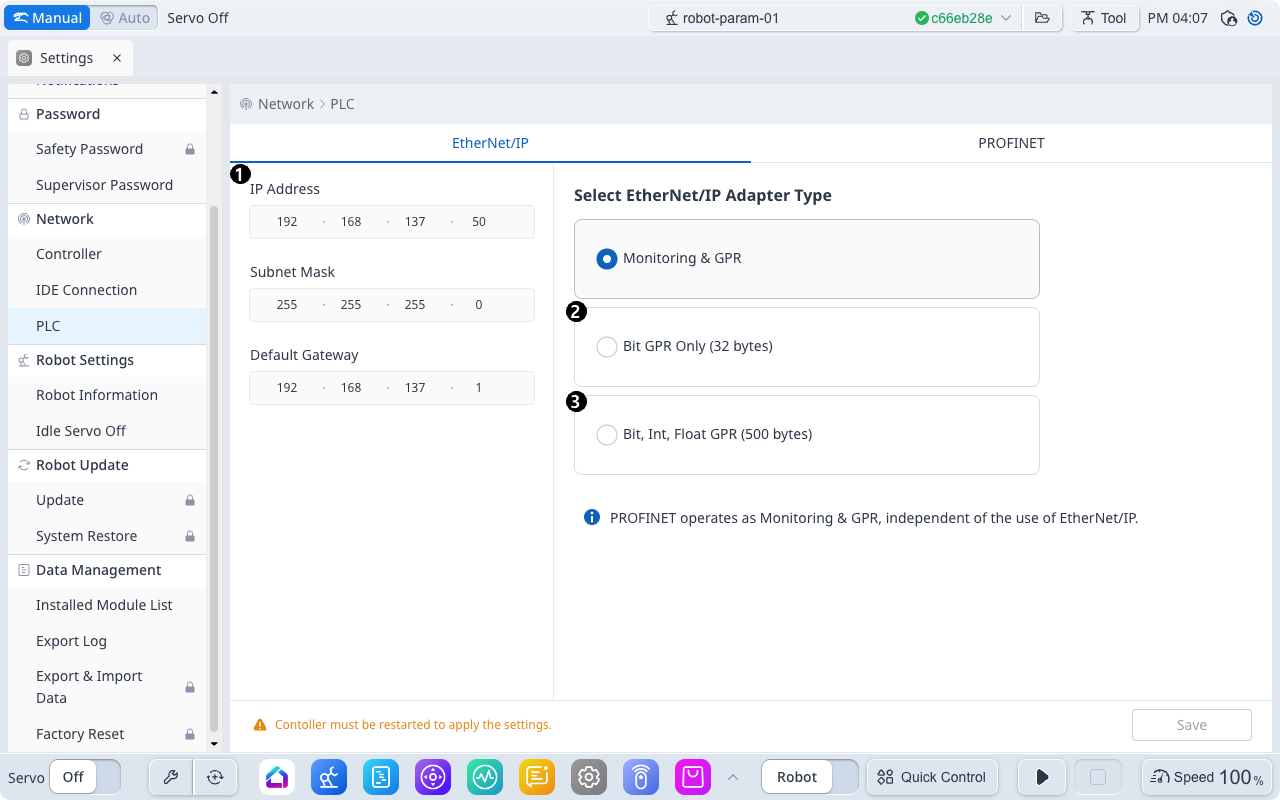
斗山机器人的机器人控制器支持EtherNet/IP适配器(从属)功能,允许在从外部设备(以太网/IP扫描仪/主设备)读取机器人参数后修改数据。(例如,机器人参数监控,通用寄存器(位,内部,浮动)– 使用通用寄存器(GPR))
注1)有关EtherNet/IP的详细信息,请参阅www.odva.org。
注2)初始默认IP为192.168.137.50。之后,您可以根据PLC控制应用程序的使用情况更改控制器IP。
使用扩展协议
PROFINET IO设备(PNIO设备)和以太网/IP适配器(EIP适配器)功能在控制器启动时一起启动,并与主设备处于连接待机状态。因此,为了使用该功能,必须连接并设置主中继器。每个主设备都有不同的特征,因此有必要进行检查。
注意
以下是工业以太网常规功能的实现特征的说明。
斗山机器人控制器的工业以太网功能不使用单独的ASIC,而是基于TCP/IP实现其功能,因此不支持实时性能。
外部设备的数据输出具有相同的标记(PNIO,EIP),但输入到机器人的数据只有相同的结构,不会链接。因此,PNIO控制器的数据输出与EIP扫描仪的输出数据不同步。
有关PNIO和EIP的I/O表,请参阅单独的文档(或附件)。
以太网/IP完整GPR映射
EtherNet/IP全GPR映射可支持机器人中不同类型的I/O。
位I/O GPR 24ea
整数I/O GPR 50ea
浮子I/O GPR 50ea
从设置模块的左侧菜单中,选择PLC以转至以下屏幕。(请参阅 "网络"部分中的"配置")
在下图中,项目3是完整的GPR映射,设置仅在保存并重新启动后保存。
Profinet插槽
对于网络优化,只有感兴趣的插槽才能使用执行事务的功能。
插槽#1:机械手状态(T2O)
插槽#2:机械手错误代码(T2O)
插槽#3:接头(T2O)
插槽#4:任务(T2O)
插槽#5:刀头GPR (T2O)
插槽#6:内部GPR (T2O)
插槽#7:浮子GPR (T2O)
插槽#8:I/O控制(O2T)
插槽#9:钻头GPR (O2T)
插槽#10:内部GPR (O2T)
插槽#11:浮子GPR (O2T)
从设置模块的左侧菜单中,选择PLC并选择Profinet选项卡以查看以下屏幕。(请参阅 "网络"部分中的"配置")
您可以使用中央的复选框仅选择用户感兴趣的插槽,并且仅在保存和重新引导后保存设置。
机械手错误代码信息
在没有TP (HMI)的环境中,用户可以通过PLC检查机械手的错误代码信息(请参阅 "网络"部分中的"配置")
以太网/IP
注意
由于事务限制(500字节),以太网/IP最多可反映两个错误代码。
字节偏移 | 说明 |
|---|---|
36 | 主要和次要(错误代码#1)
|
40 | 年&月&日&小时(错误代码#1)
|
44 | 分钟,秒和毫秒(错误代码#1)
|
48 | 主要和次要(错误代码#2)
|
52 | 年&月&日&小时(错误代码#2)
|
56 | 分钟,秒和毫秒(错误代码#2)
|
PROFINET:插槽#2
字节偏移 | 说明 |
|---|---|
0 | 主要和次要(错误代码#1)
|
4 | 年&月&日&小时(错误代码#1)
|
8 | 分钟,秒和毫秒(错误代码#1)
|
12 | 主要和次要(错误代码#2)
|
16 | 年&月&日&小时(错误代码#2)
|
20 | 分钟,秒和毫秒(错误代码#2)
|
24 | 主要和次要(错误代码#3)
|
28 | 年&月&日&小时(错误代码#3)
|
32 | 分钟,秒和毫秒(错误代码#3)
|