机器人的端部法兰盖上有两个 8 针 M8 连接器,有关位置和形状,请参见下图。
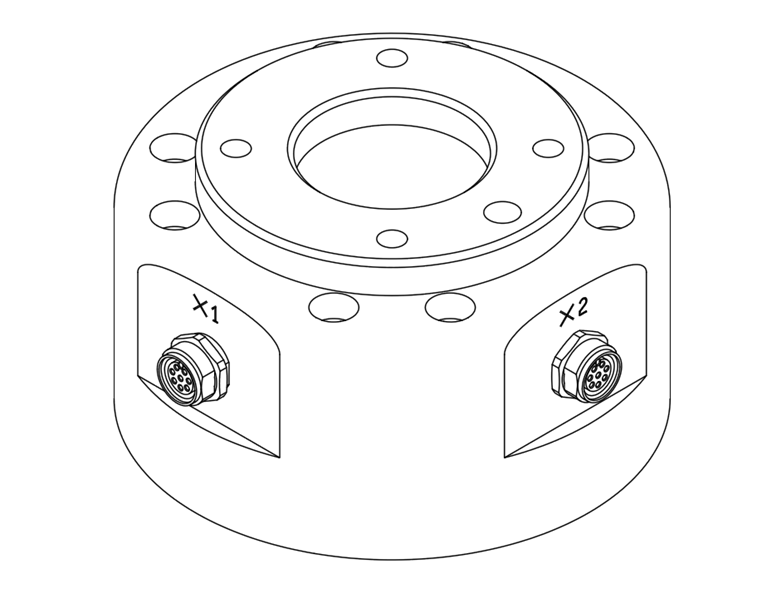
该连接器用于提供操作特定机器人工具内置的夹持器或传感器所需的电源和控制信号。以下是工业电缆示例(可以使用等效电缆):
-
Phoenix contact 1404178 (直头)
-
Phoenix contact 1404182 (直角)
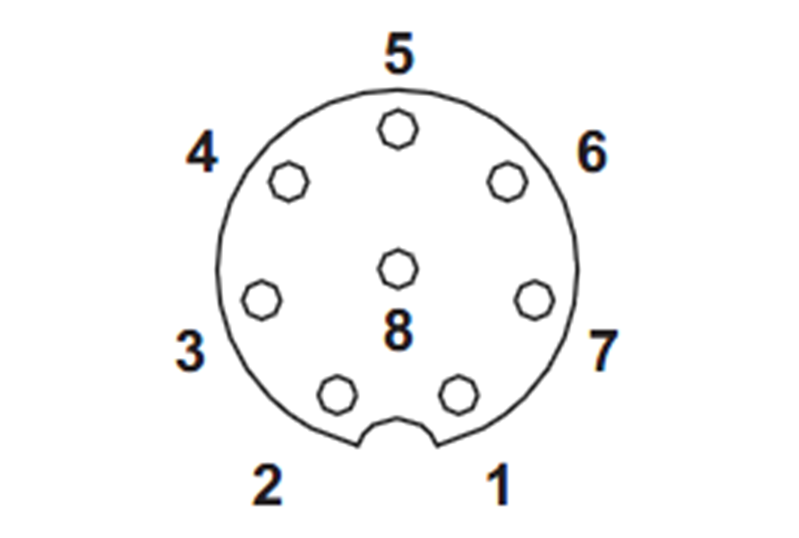
每个连接器的针脚图如下所示:
Ÿ 原理图
Scroll conditional content
1m/hseries
2aseries
通过 X1 和 X2 连接器提供的 I/O 功能互不相同,有关详细的 I/O 设置,请参见下表。
X1 设置(数字 I/O)
|
编号 |
信号 |
|
1 |
Digital Input 1 |
|
2 |
Digital Output 1 |
|
3 |
Digital Output 2 |
|
4 |
Digital Output 3 |
|
5 |
+24V |
|
6 |
Digital Input 3 |
|
7 |
Digital Input 2 |
|
8 |
GND |
X2 设置(数字 I/O)
|
编号 |
信号 |
|
1 |
Digital Input 4 |
|
2 |
Digital Output 4 |
|
3 |
Digital Output 5 |
|
4 |
Digital Output 6 |
|
5 |
+24V |
|
6 |
Digital Input 6 |
|
7 |
Digital Input 5 |
|
8 |
GND |
法兰 I/O 的内部电源设置为 24V,有关 I/O 连接期间的详细电源规格,请参见下表。
|
参数 |
最小值 |
Typ |
最大值 |
单位 |
|
电源电压 |
- |
24 |
- |
V |
|
电源电流 |
- |
- |
3 |
A |
|
数字输出 |
- |
6 |
- |
EA |
|
数字输入 |
- |
6 |
- |
EA |
-
设置工具和夹持器,使其在切断电源时不会造成任何危险。
(例如,workpiece 从工具上坠落)
-
在向机器人供电时,每个连接器的 5 号端子始终输出 24V 电压,因此在设置工具和夹持器时,请确保切断机器人的电源。