Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
Main
第 1 部分 .安全手册
第2部分.启动机械手
步骤 1.机械手安装
拆下包装
将电缆连接至控制器
固定机械手底座
将控制器连接到机械手
将电源连接至控制器
位置控制器
加电控制器
松开紧急停机按钮
脱开包装姿势
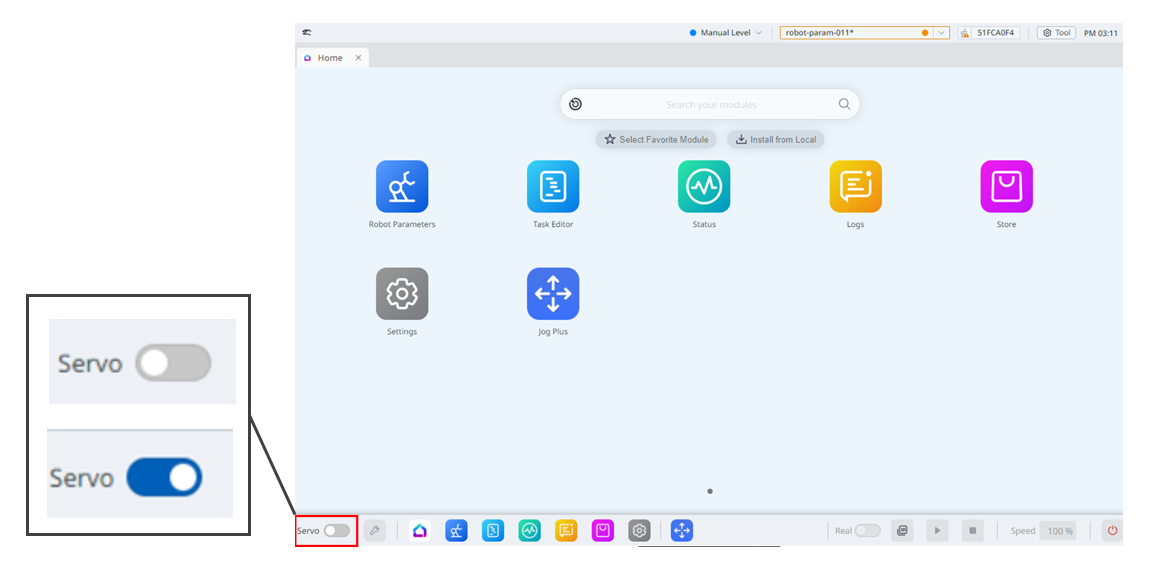
伺服关闭
步骤 2.工具安装和 I/O 测试
第 3 部分 .安装手册
第4部分.用户手册概述
Breadcrumbs
Home
用户手册(V3.2.0)
第2部分.启动机械手
步骤 1.机械手安装
On this Page
伺服关闭
必填
简单
1分钟
伺服开启状态是指机械手已准备就绪并向机械手接头供电以修改机械手姿势的状态。
按下伺服关闭按钮切断机械手接头的电源并停止机械手。有关详细信息
伺服开启概述
,请参见。