Skip to main content
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main navigation
Close navigation
3.6.0
3.5.0
3.4.0
3.3.0
3.2.2
3.2.1
3.2.0
1. M/H Series
2. A Series
3. E Series
4. P Series
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Korean
English
Chinese
Czech
Dutch
French
German
Hungarian
Italian
Japanese
Polish
Portuguese
Spanish
Main
Manual PDF download
ROS 2 Docs.
API Docs.
Legacy manual
Main
第 1 部分 .安全手册
第2部分.启动机械手
第 3 部分 .安装手册
第4部分.用户手册概述
打开/关闭系统电源
程序的屏幕布局概述
什么是机器人?
伺服开启概述
后端驱动器模块
恢复模块
机械手参数模块
遥控器模块
任务编辑器模块
状态模块
日志模块
存储模块
设置模块
点动加模块
点动屏幕
移动屏幕
设置要移动的角度
设置要移动的基准参考坐标
设置要移动的世界坐标参考坐标
根据工具设置要移动的坐标
对齐面板
附录 DART Platform 安装环境(推荐)
Breadcrumbs
Home
用户手册(V3.2.0)
第4部分.用户手册概述
点动加模块
移动屏幕
On this Page
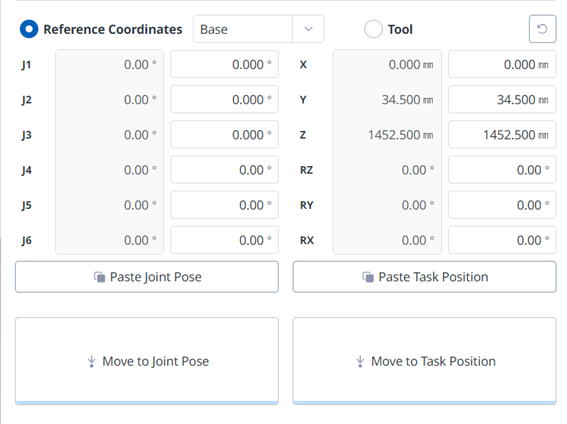
设置要移动的基准参考坐标
要根据机器人的基坐标移动机器人:
选择“移动”选项卡,然后选择“参考坐标”项。
选择显示坐标作为基准。
按住按钮移动到相应的任务位置即可移动到设定的坐标。