Configuração dos modos de parada de segurança
OBRIGATÓRIO FÁCIL 5 MIN
Aprenda os tipos de batentes de segurança e como engatar/desengatar a paragem de segurança.
Tipos de batentes de segurança
Os modos de paragem fornecidos para garantir a segurança do utilizador são os seguintes:
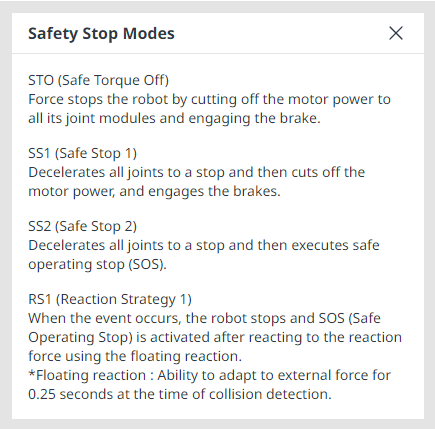
- STO (binário seguro desligado): Pára o Servo desligado (a alimentação do motor é imediatamente desligada)
- SS1 (Paragem segura 1): Servo desligado após paragem de desaceleração máxima
- SS2 (Paragem segura 2): Standby após paragem de desaceleração máxima (pausa)
- RS1: Após a colisão, move-se na direção oposta à colisão e, em seguida, entra em standby (só pode ser definido em Detecção de colisão/violação do limite de força TCP)
Os robôs Doosan Robotics têm dois tipos de funções de parada de segurança. A paragem de emergência é utilizada para situações de emergência gerais e o robô pode retomar a operação com o Servo ligado depois de libertar a paragem de emergência. Em caso de paragem de proteçãoão, o robô pode retomar a operação resolvendo a causa do batente de proteçãoão e soltando o batente.
- Paragem de emergência: Ele define o modo de parada quando o botão de parada de emergência do pendente Teach ou um dispositivo externo instalado adicionalmente é ativado
- É ativado quando o interrutor de paragem de emergência do pendente de ensino ou o ligado ao terminal DE EM TBSFT é premido.
- Apenas STO ou SS1 podem ser selecionados.
- Batente de proteçãoão: Define o modo de paragem quando o equipamento de proteçãoão ligado externamente é ativado
- É ativado quando o equipamento de proteçãoão ligado ao terminal TBSFT PR é ativado.
Para obter mais informações sobre as funções de paragem de segurança, consulte (3.2.0-pt_PT) Funcionalidades de segurançaa .
Como engatar/desengatar a paragem de segurança
Prima o botão de paragem de emergência no pendente Teach ou ative o dispositivo de segurança ligado à E/S de segurança para ativar a paragem de emergência. Os dispositivos de segurança podem ser ligados à paragem de emergência ou à paragem de proteçãoão através das funções Workcell Manager (Gestor de células de trabalho) > Robot (Robô) > Safety I/O (E/S de segurança) do ecrã pendente Teach.
- Para obter mais informações sobre como conetar um dispositivo de segurança a E/S de segurança, consulte conetar E/S do controlador.
- Para obter informações sobre como definir a função de paragem de segurança para esta ligação no programa, consulte E/S do sinal de segurança.
Itens de menu
| Item | Descrição | |
|---|---|---|
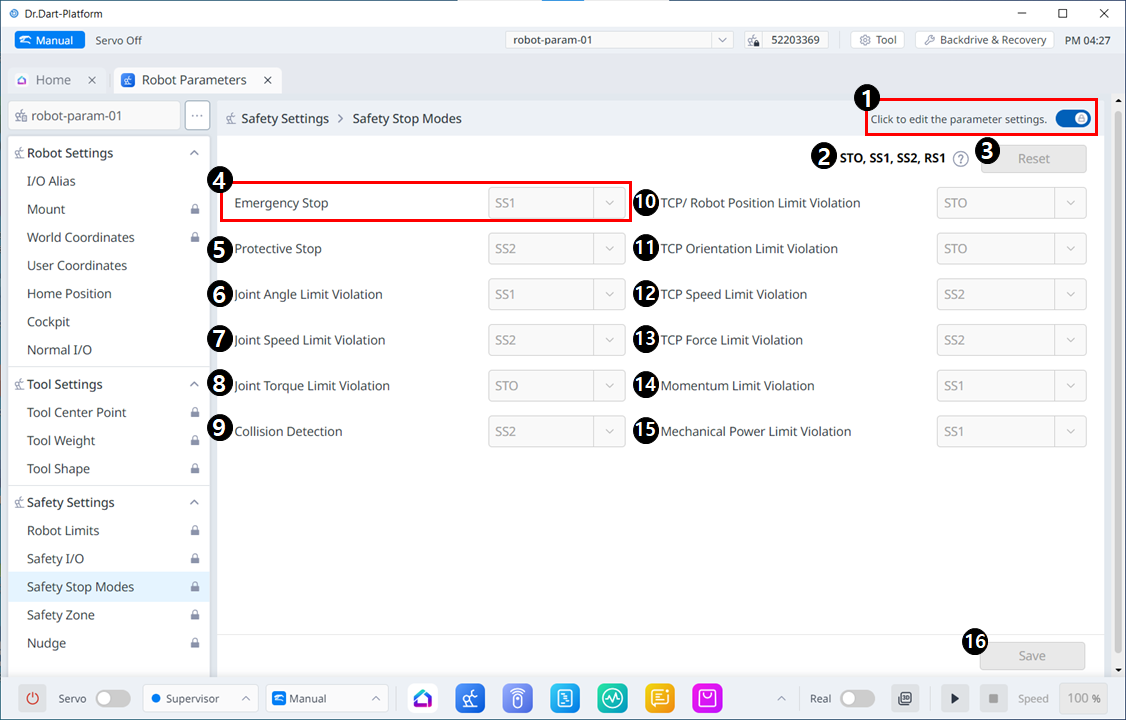
| 1 | Bloquear botão de alternância | Utilizado para bloquear o valor definido. A palavra-passe de segurança é necessária para modificar o valor definido. |
| 2 | Mensagem de informação | Uma mensagem que fornece informações necessárias para a configuração. |
| 3 | Repor | Um botão para repor as definições. |
| 4 | Paragem de emergência | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 |
| 5 | Batente de proteçãoão | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: SS1 SS2 |
| 6 | Violação do limite do ângulo da junta | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 7 | Violação do limite de velocidade da junta | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 8 | Violação do limite de binário da junta | STO만 가능합니다. |
| 9 | Detecção de colisão | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 RS1 |
| 10 | Violação do limite de posição do robô TCP | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 11 | Violação do limite de orientação TCP | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 12 | Violação do limite de velocidade TCP | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 13 | Violação do limite de força TCP | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 14 | Violação do limite de momentum | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 15 | Violação do limite mecânico | É possível selecionar uma paragem de segurança para utilizar o item correspondente. O menu suspenso inclui o seguinte: STO SS1 SS2 |
| 16 | Guardar | Este botão permite guardar os valores de definição. |
A seguinte janela pop-up aparece na mensagem de informação: