Definição de limite de espaço
O item de célula de trabalho de limite de espaço define um limite virtual na zona mais externa do robô. O robô pode ser operado sem definir limites de espaço, mas recomenda-se definir limites de espaço para garantir a operação segura do robô.
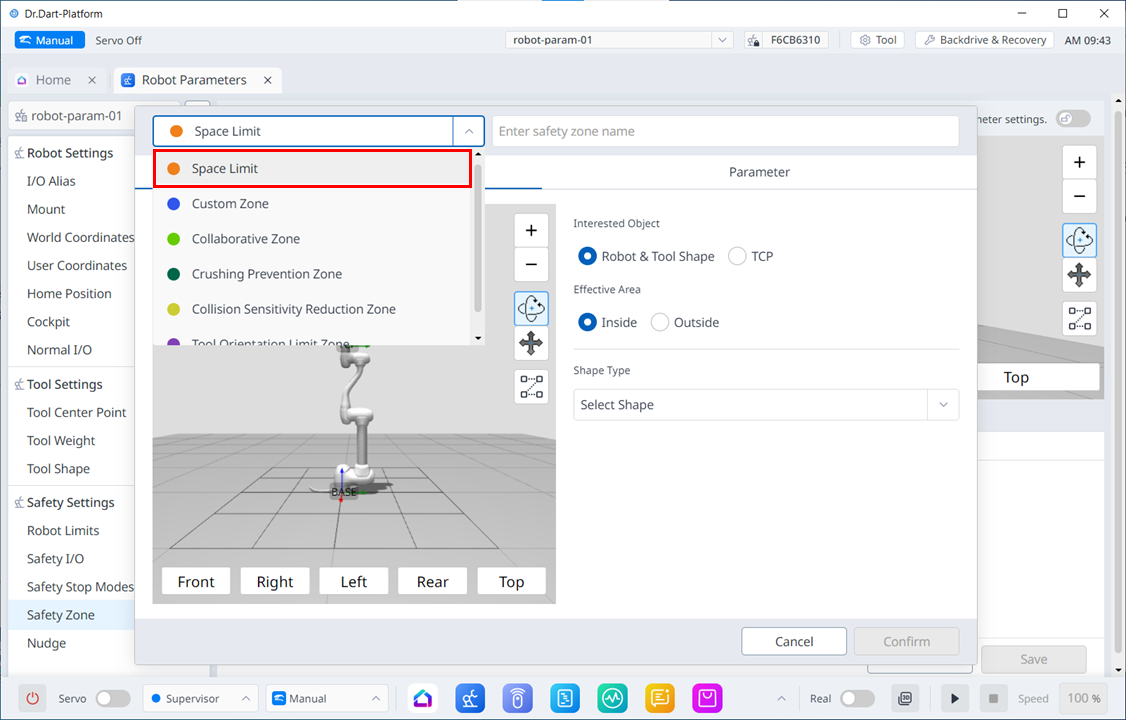
O limite de espaço pode ser alcançado através do menu pendente no canto superior esquerdo em Parâmetros do robô > Definições de segurança > Áreas de trabalho de segurança > Adicionar novo espaço de trabalhoe, em Tipo de forma, pode selecionar Esfera, cilindro, cubo, cuboide inclinado ou poliedro para definir.
- O ponto de inspeção pode ser definido como o robô ou TCP, e o espaço válido pode ser definido como interior ou exterior.
- A zona de monitorização pode ser definida como robô ou TCP. Define se pretende detetar ou não a zona interior ou exterior.
- O valor padrão é toda a zona e o interior do conjunto.
- O robô pode ser ajustado corretamente depois de ser posicionado na zona de segurança definida.
Para definir um limite de espaço para o robô, em Espaços de trabalho de segurança , toque no botão Adicionar novo espaço de trabalho e, em Tipo de forma, selecione um dos seguintes tipos: Cubo, Cilindro, Caixa Multiplano, Esfera, ou cuboide inclinado. A palavra-passe de segurança é necessária durante a configuração e ativação.