
Ordenar por alvo
Isso é útil quando você deseja alinhar o TCP ao longo de um determinado eixo de uma peça de trabalho com a finalidadede ensinar uma peça de trabalho. Se quiser ver depois de corrigir a sua postura, utilize a função de ensino direto fixo ao rosto ou à linha com o botão Cockpit.
Para ordenar o TCP do robô por destino:
Selecione a guia Classificar e a guia Classificar para destino.
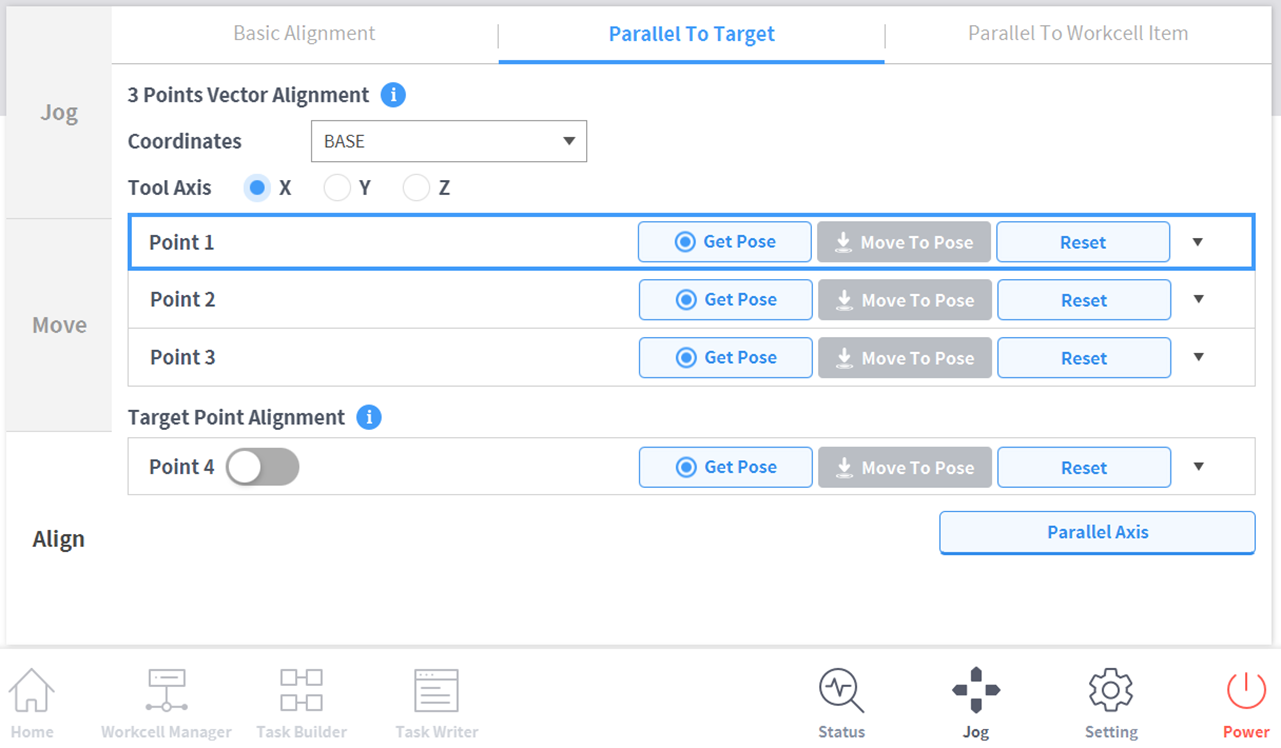
Selecione um sistema de coordenadas de referência para alinhar.

Selecione o eixo da ferramenta que pretende alinhar.

- Desloque o robot para a posição pretendida e toque no ponto 1.
- Toque no botão Guardar pose no ponto 1.
Defina o ponto 2, ponto 3 da mesma forma. Quando a configuração estiver concluída, a área vetorial imaginária é definida em relação a uma escala de 3 pontos.

- (Opcional) Para posicionar junto com a orientação do TCP, toque no botão de alternância no Ponto 4, mova o robô para a posição desejada e, em seguida, toque no botão Salvar Pausa.
- Mantenha premido o botão Align Axis(Alinhar eixo) para alinhar o eixo.
- Posicione a cabeça de 6 eixos 150 mm no eixo z em relação ao alvo.