Inicializando o sistema
Quando ligado, o sistema começa a arrancar. Quando a inicialização estiver concluída, o programa operacional do sistema será exibidona tela do pendente de costura. Ecrãs de programaPara obter uma descrição completa do programa de funcionamento do sistema, consulte.
Saber
- Servo ligado: Para mover a posição do robô, a energia deve ser aplicada à junta do robô para permitir que o robô se ligue, o que muda o robô para o modo de espera. O que é o Servo-ons? Consulte para obter mais informaçõessobre o servo-ligado.
- Definir data e hora: A data e a hora mostradasnas mensagens do Teach-Pendant e de log armazenadas no robô são exibidas com base na data e na hora definidas no programa operacional do sistema, de modo que a data e a hora devem ser definidas após a primeira inicialização. Consulte para obter informações sobre como definir a data e a horaDefinir a data e a hora.
- A plataforma DART permite o controle robótico no mesmo ambienteque o Teach-Pendant.
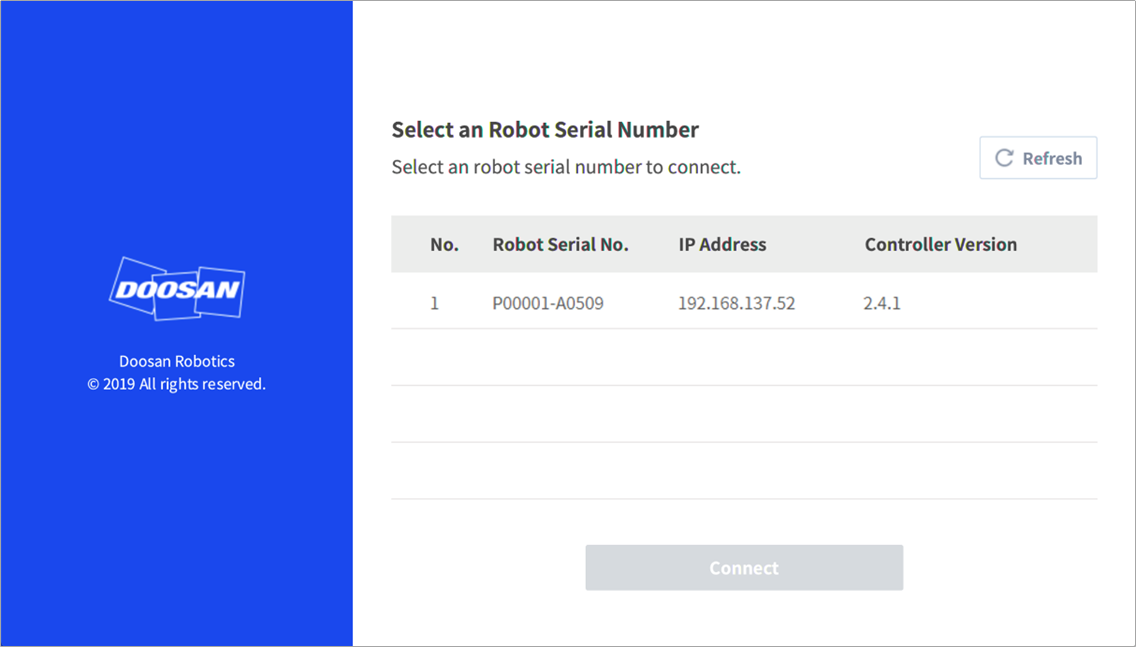
- Para a Plataforma DART, quando a bagageira estiver concluída, será apresentado um ecrã com os robôs ligados à rede , onde irá identificar os números de série dos robôs que pretende ligar e, em seguida, ligá-los.
- É apresentada uma janela pop-up de avisoquando existe uma diferença de versão do software entre o robô, o controlador e o módulo Smart Vision (se a Smart Vision estiver ligada).