
Funcionamento manual - aprender a Jog
MENDATORY NORMAL 15 MIN
- Jog : Move as juntas de um robô ou TCP sobre um eixo de articulação ou eixo de coordenadas selecionado pelo usuário
- Mover : Mova as juntas do robô ou TCP para a posição alvo introduzida pelo utilizador
- Alinhar : Move a ponta do robô paralelamente à direção vertical do plano selecionado pelo usuário e à direção do eixo de coordenadas da ponta do robô
O movimento do robô é, em grande parte, dois movimentos separados.
- Movimento da junta: Rode cada junta de forma linear
- Movimento Tarefa: A tampa da extremidade move-se linearmente em direção à posição alvo
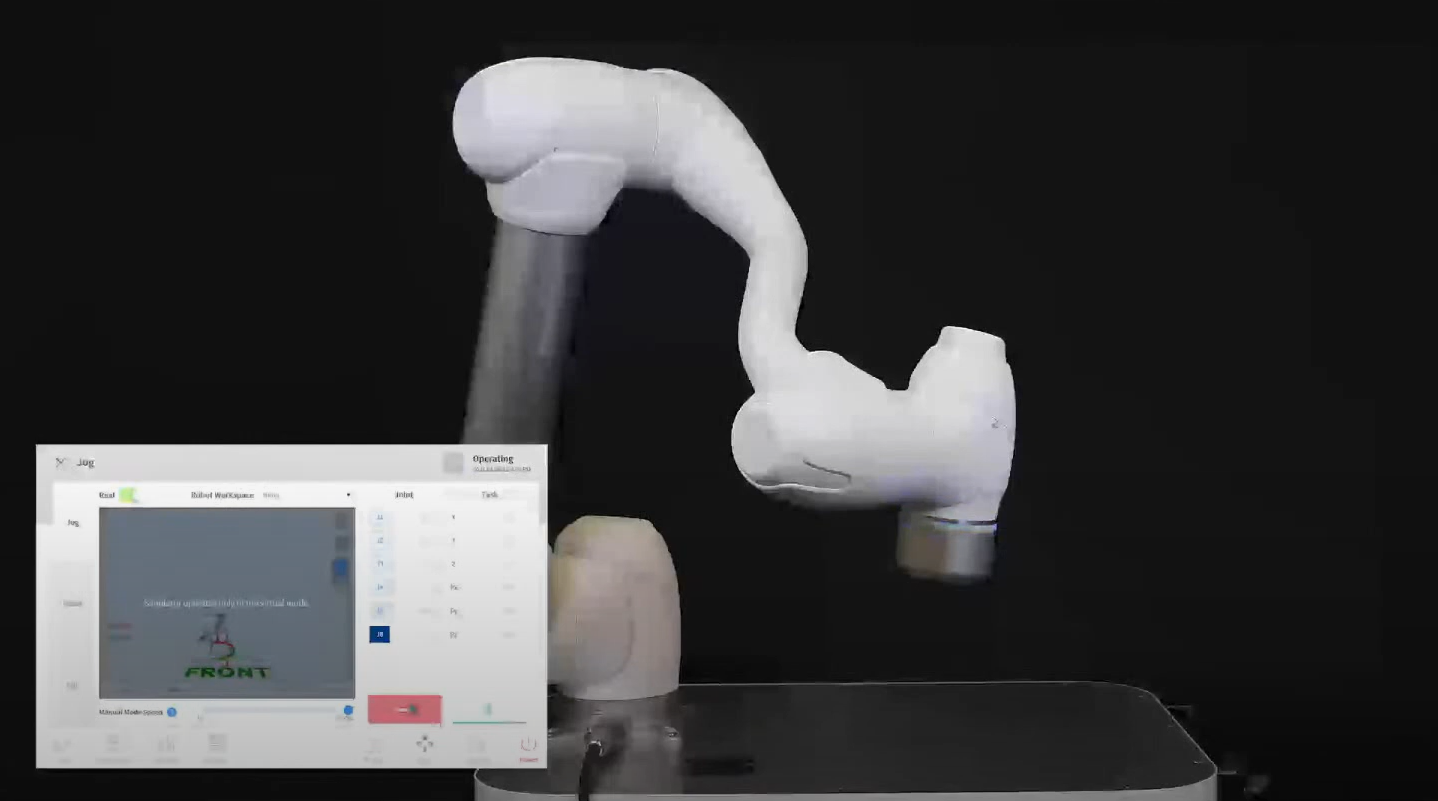
Para mover o robô usando movimento articular na tela de Jog, faça o seguinte:
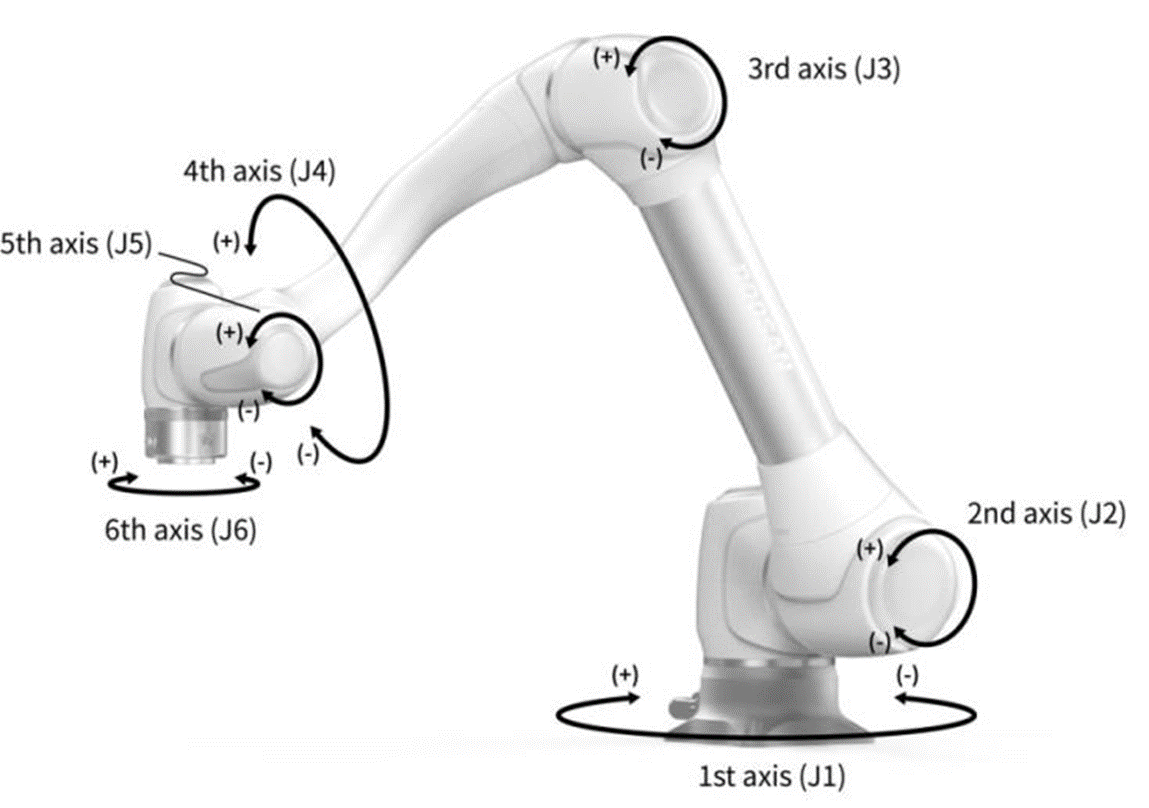
- Selecione o separador Juntas (Juntas).
- Selecione o eixo que pretende mover. Por exemplo, J1.
- Prima os botões - / - para mover o robot. Enquanto o botão - / - estiver premido, o robot move-se e o ecrã mostra a posição atual em tempo real.
Para mover o robô usando o Movimento de Tarefa na tela Jog, faça o seguinte:
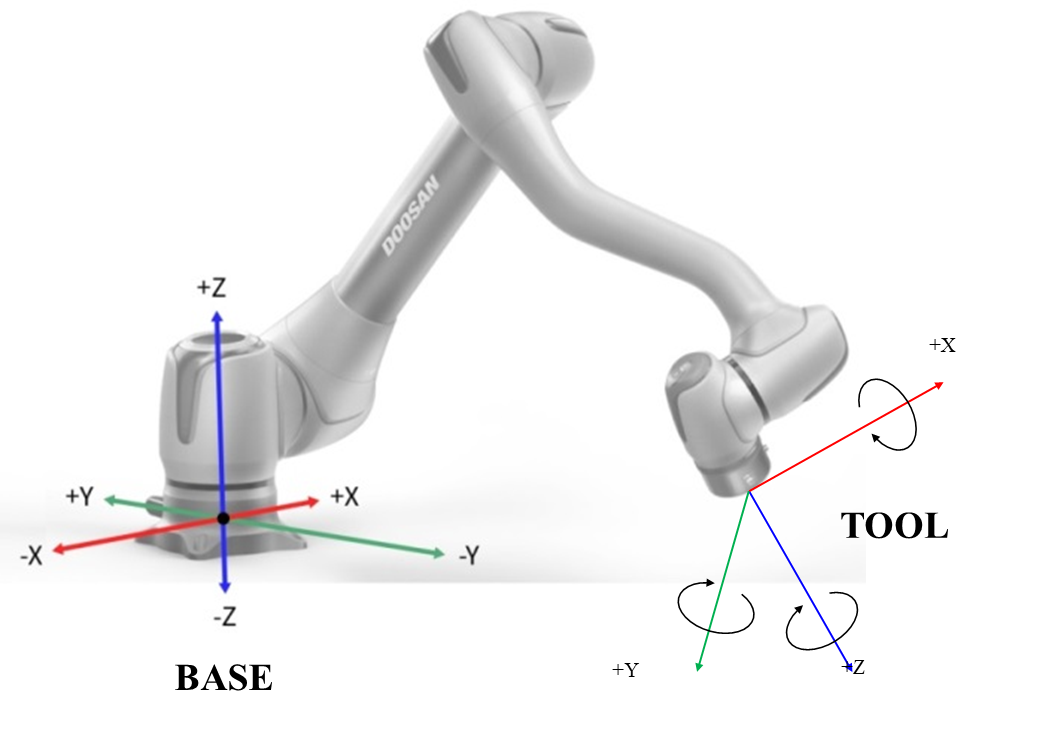
- Selecione um sistema de coordenadas de referência. O robô pode ser movido em relação ao sistema de coordenadas da base ou ao sistema de coordenadas da ferramenta.
- Selecione a direção que pretende mover. Por exemplo, pode selecionar o eixo X.
- Prima os botões - / - para mover o robot. Enquanto o botão - / - estiver premido, o robot move-se e o ecrã mostra a posição atual em tempo real.
Cena em JogEcrã de saltoEcrã de alinhamento Para obter uma descrição detalhada do movimento de movimento rotativo e uma descrição do movimento e alinhamento, consulte a e, respetivamente.
Saber
- Quando o interrutor de modo físico no canto superior esquerdo da tela Jog é desligado, o robô só se moverá da tela virtual no lado esquerdo da tela Jog. Ligar o interrutor de alternância do modo físico fará com que o robô real se mova.