
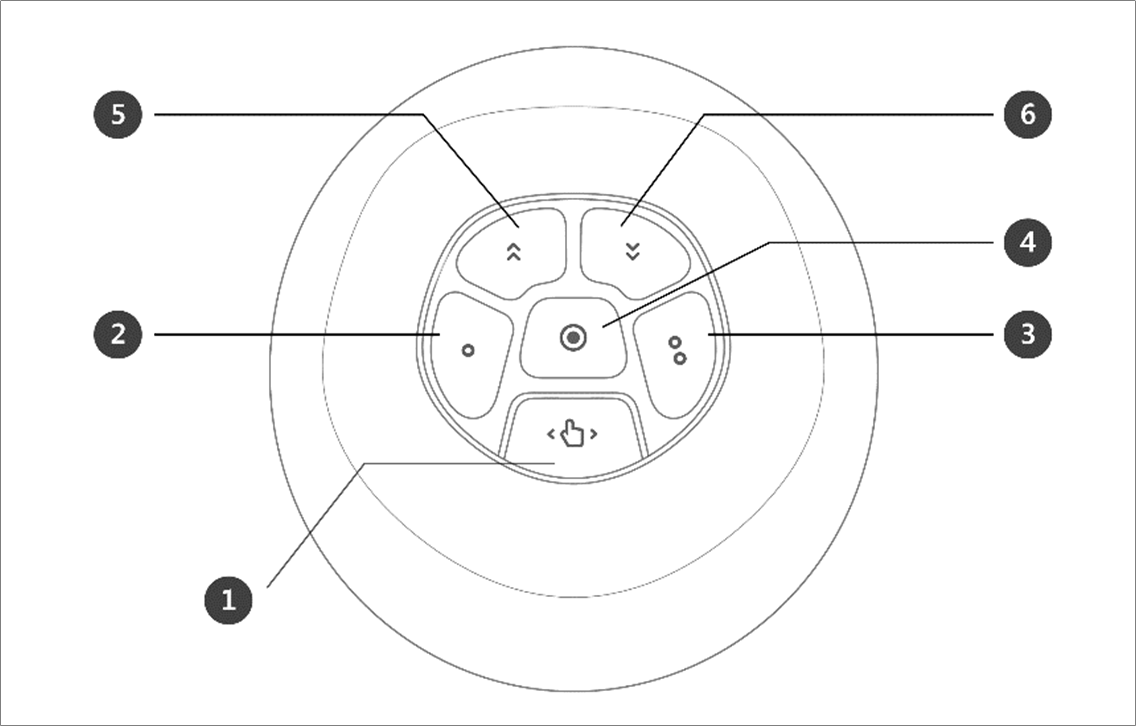
Utilizar o botão Cockpit (6 botões)
Número | Item | Descrição |
|---|---|---|
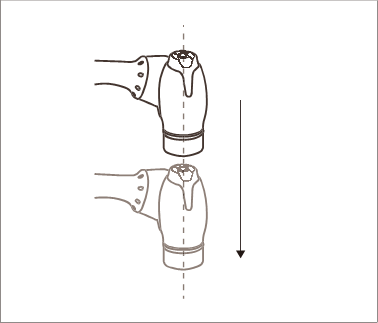
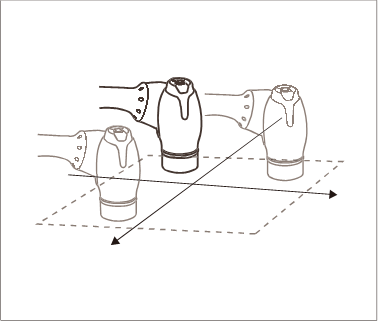
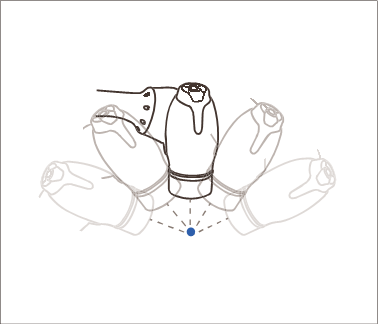
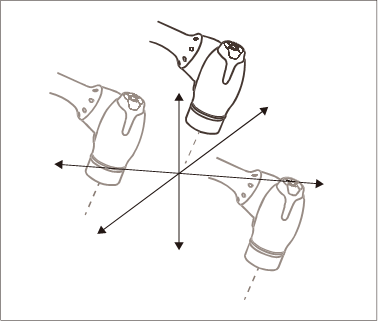
1 | Botão de orientação da mão | O robot pode ser posicionado livremente em todas as direções. |
2,3 | Botão User Settings (Definições do utilizador) | A posição do robot pode ser alterada entrando diretamente na sua posiçãopelas condições de imobilização correspondentes ao modo atribuído.
Configurar o CockpitConsulte ""para obter mais informações sobre como configurar esta configuração. |
4 | Botão Guardar pose | Guarda a pose atual do robô. Definir um Ponto de Trabalho para um Comando de Especialidade utilizando um botão CockpitConsulte "" para obter mais informações. |
5 | Uma linha acima | Move a focagem apresentada no ecrã uma linha para cima |
6 | Uma linha para baixo | Mova a focagem apresentada no ecrã para baixo numa linha |
Não sei – Converter definições do Cockpit



- O botão Salvar uma Pausa na tela Configurações de Especialidade move automaticamente o foco para a próxima pose.
- O botão Cancelar está disponível somentena janela Configurações para especialidades que gerenciam a pose múltipla.