
Execute com o Sistema de Coordenadas Mundial
Para mover o robô com base em coordenadas mundiais
- Selecione a guia Tarefas na tela Jog.
Selecione Mundo como o sistema de coordenadas de exibição e Mundo como o ponto de referência do sistema de coordenadas da tarefa.
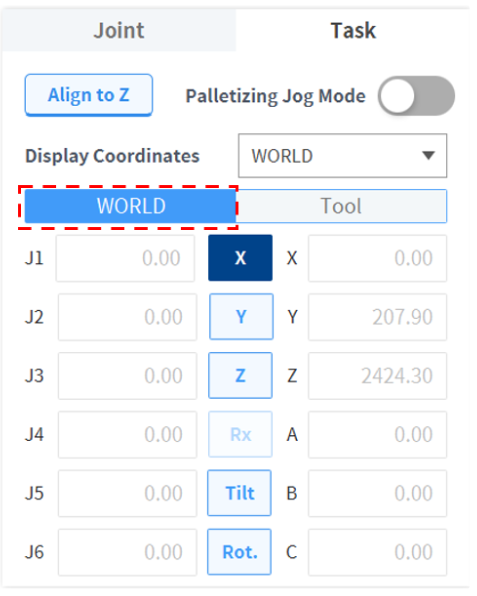
- Selecione o Sistema de Coordenadas Mundial que deseja mover. (Rx está inativo para os modelos da série P)
-

