Ustawienie trybów zatrzymania bezpieczeństwa
OBOWIĄZKOWE ŁATWE 5 MIN
Poznanie typów ograniczników bezpieczeństwa oraz sposobu włączania/wyłączania ogranicznika bezpieczeństwa.
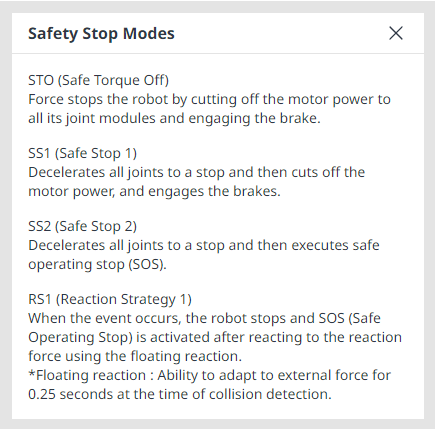
Rodzaje przystanków bezpieczeństwa
Dostępne tryby zatrzymania zapewniające bezpieczeństwo użytkownika są następujące:
- STO (bezpieczny moment obrotowy wyłączony): Zatrzymuje Servo Off (zasilanie silnika jest natychmiast wyłączane)
- SS1 (Bezpieczne zatrzymanie 1): Serwomechanizm wyłączony po zatrzymaniu maksymalnego zwalniania
- SS2 (bezpieczne zatrzymanie 2): Tryb gotowości po zatrzymaniu maksymalnego zwalniania (pauza)
- RS1: Po kolizji porusza się w przeciwnym kierunku, a następnie przechodzi w tryb gotowości (można ustawić tylko w przypadku naruszenia limitu siły TCP/wykrywania kolizji)
Roboty Doosan Robotics mają dwa rodzaje funkcji zatrzymania bezpieczeństwa. Zatrzymanie awaryjne jest używane w ogólnych sytuacjach awaryjnych, a robot może wznowić pracę przy włączonym serwo po zwolnieniu zatrzymania awaryjnego. W przypadku zatrzymania ochronnego robot może wznowić pracę, usuwając przyczynę zatrzymania ochronnego i zwalniając ogranicznik.
- Zatrzymanie awaryjne: Ustawia tryb zatrzymania po uaktywnieniu przycisku zatrzymania awaryjnego manipulatora nauczania lub dodatkowo zainstalowanego urządzenia zewnętrznego
- Włącza się po naciśnięciu przełącznika zatrzymania awaryjnego manipulatora nauczania lub przełącznika podłączonego do terminalu TBSFT EM.
- Można wybrać tylko STO lub SS1.
- Ogranicznik ochronny: Ustawia tryb zatrzymania, gdy urządzenie zabezpieczające podłączone zewnętrznie jest włączone
- Aktywuje się, gdy urządzenie zabezpieczające podłączone do terminalu TBSFT PR jest włączone.
Aby uzyskać więcej informacji na temat funkcji zatrzymania awaryjnego, patrz Funkcja bezpieczeństwa.
Włączanie/wyłączanie blokady bezpieczeństwa
Naciśnij przycisk zatrzymania awaryjnego na manipulatorze nauczania lub włącz urządzenie zabezpieczające podłączone do WE/Wy bezpieczeństwa, aby włączyć zatrzymanie awaryjne. Urządzenia zabezpieczające można podłączyć do zatrzymania awaryjnego lub zatrzymania ochronnego za pomocą Menedżera komórek roboczych > Robot > Funkcje wejścia/wyjścia bezpieczeństwa ekranu manipulatora uczenia.
- Więcej informacji na temat podłączania urządzenia zabezpieczającego do WE/Wy bezpieczeństwa można znaleźć w części Podłączanie WE/Wy kontrolera.
- Informacje na temat ustawiania funkcji zatrzymania bezpieczeństwa dla tego połączenia w programie można znaleźć w części WE/wy sygnału bezpieczeństwa.
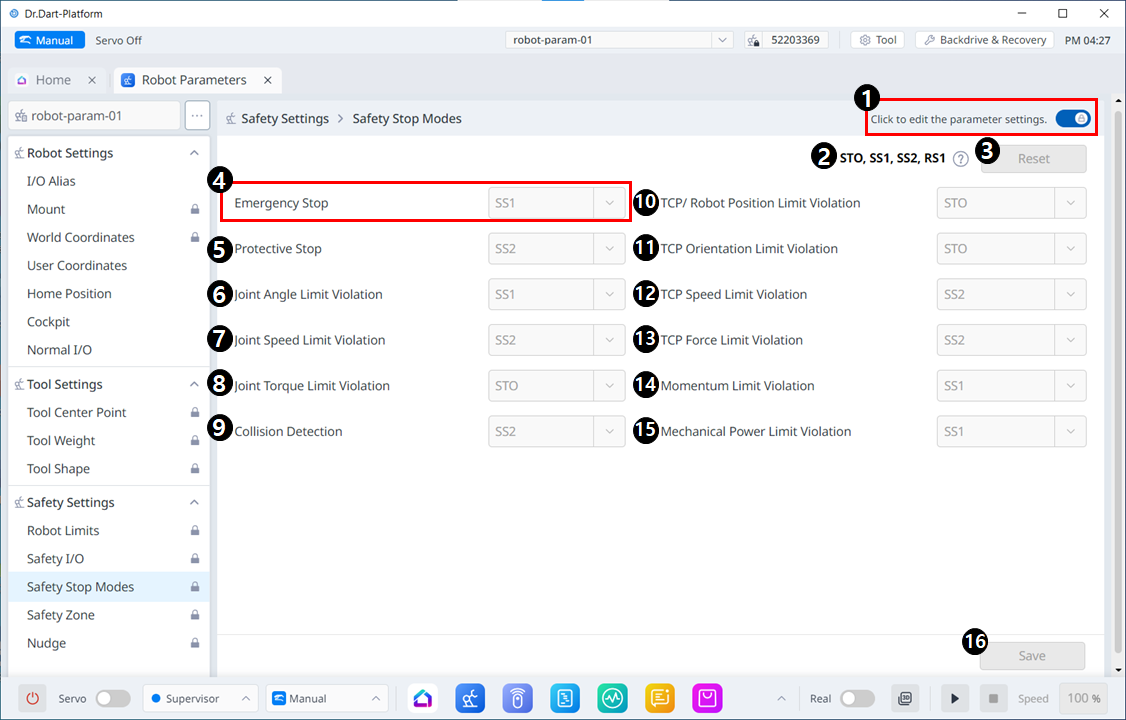
Elementy menu
| Pozycja | Opis | |
|---|---|---|
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
| 2 | Komunikat informacyjny | Komunikat zawierający informacje niezbędne do ustawienia. |
| 3 | Resetuj | Przycisk służący do resetowania ustawień. |
| 4 | Zatrzymanie awaryjne | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 |
| 5 | Ogranicznik ochronny | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: SS1 SS2 |
| 6 | Naruszenie limitu kąta połączenia | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 7 | Naruszenie limitu prędkości połączenia | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 8 | Naruszenie limitu momentu obrotowego połączenia | STO만 가능합니다. |
| 9 | Wykrywanie kolizji | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 RS1 |
| 10 | Naruszenie limitu pozycji robota TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 11 | Naruszenie limitu orientacji TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 12 | Naruszenie limitu prędkości TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 13 | Naruszenie limitu siły TCP | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 14 | Naruszenie limitu momentum | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 15 | Naruszenie limitu mechanicznego | Można wybrać ogranicznik bezpieczeństwa, który będzie używany dla odpowiedniego elementu. Menu rozwijane zawiera następujące elementy: STO SS1 SS2 |
| 16 | Zapisz | Ten przycisk umożliwia zapisanie wartości ustawień. |
W komunikacie informacyjnym zostanie wyświetlone następujące okno podręczne: