Ustawienie we/wy bezpieczeństwa
Ta funkcja umożliwia wprowadzanie/przesyłanie sygnałów związanych z bezpieczeństwem za pośrednictwem terminala nadmiarowego. W przypadku wykrycia sygnału innego niż nadmiarowy sygnał wejściowy lub wyjściowy bezpieczeństwa, system określa, czy jest to zwarcie, czy usterka sprzętowa, i zatrzymuje robota w trybie STO Stop.
- Wejścia/wyjścia sygnału bezpieczeństwa) można ustawić w menu Parametry robota > Ustawienia bezpieczeństwa > WE/wy bezpieczeństwa.
Aby uzyskać więcej informacji, zobacz sekcję Wejście/wyjście sygnału bezpieczeństwa .
Elementy menu
| Pozycja | Opis | |
|---|---|---|
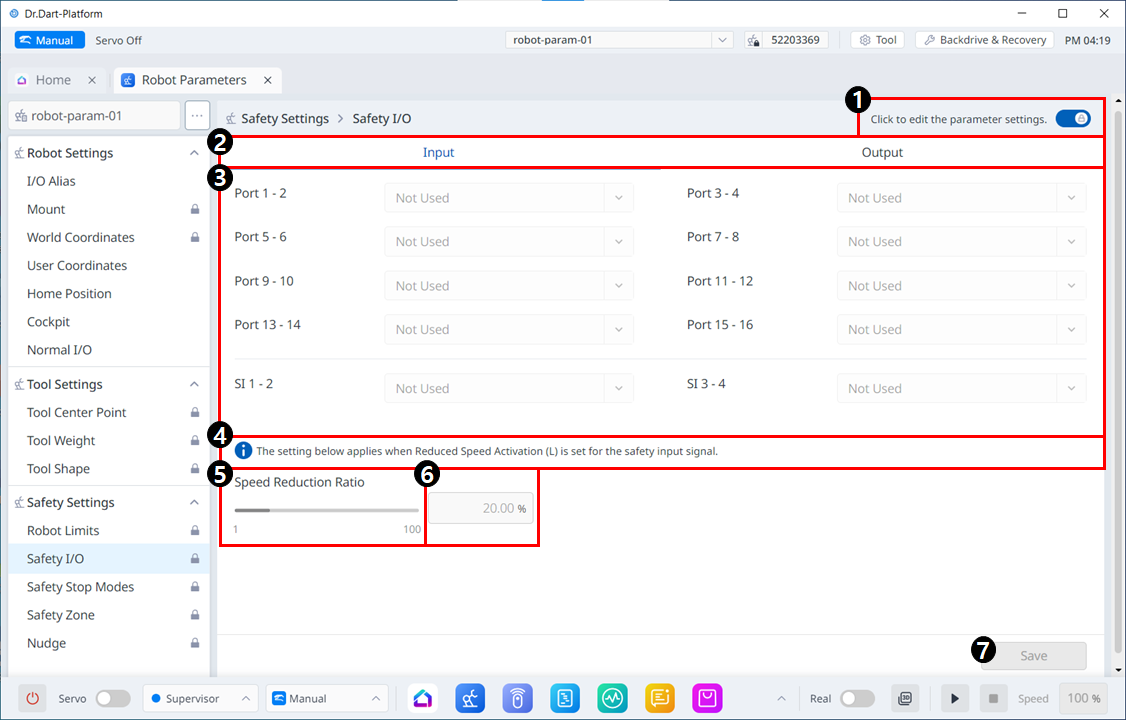
| 1 | Przycisk przełączania blokady | Służy do blokowania ustawionej wartości. Do zmiany ustawionej wartości wymagane jest hasło bezpieczeństwa. |
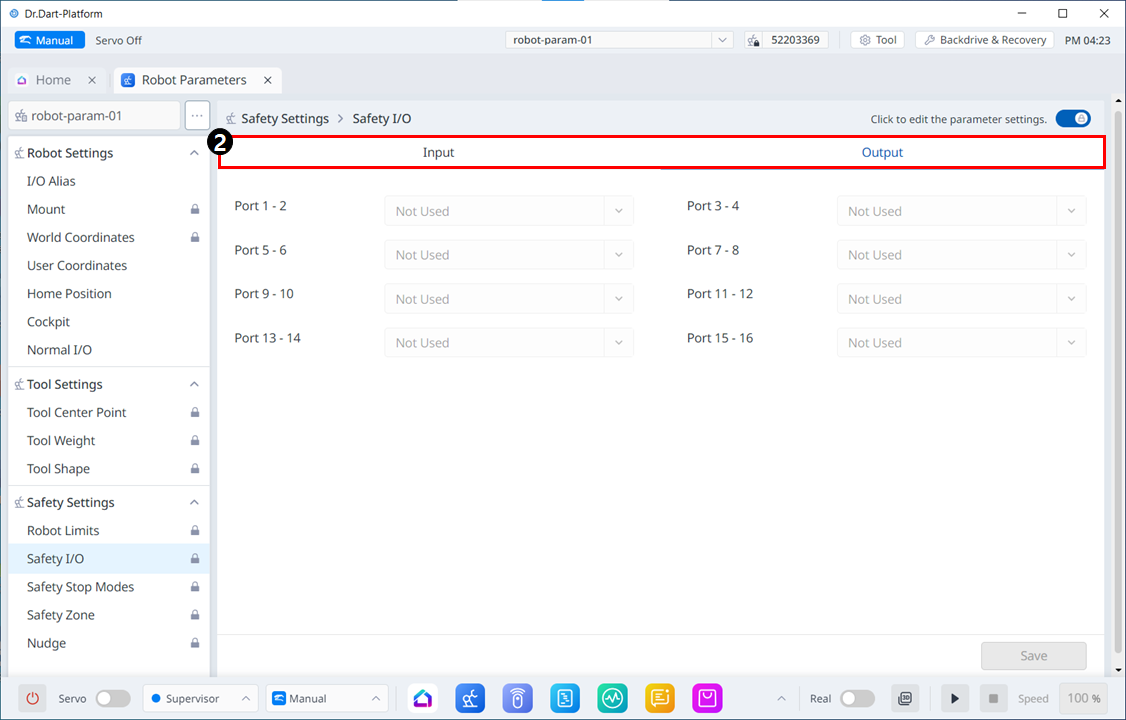
| 2 | Wejście/wyjście | Do ustawienia można wybrać jedno z wejść/wyjść. |
| 3 | Lista portów | Jest to lista portów w odpowiedniej kategorii. Menu rozwijane obejmują: Nieużywane |
| 4 | Komunikat ostrzegawczy | Uwaga dotycząca konfiguracji bezpieczeństwa we/wy |
| 5 | Suwak szybkości redukcji prędkości | Za pomocą suwaka można ustawić współczynnik redukcji prędkości. |
| 6 | Wejście szybkości redukcji prędkości | Szybkość redukcji prędkości można wprowadzić bezpośrednio. Można go ustawić w zakresie od 0 do 100%. |
| 7 | Zapisz | Ten przycisk umożliwia zapisanie wprowadzonego ustawienia. |
Ekran Wyjście zostanie wyświetlony w następujący sposób, podobnie jak w przypadku opcji Wejście.