
Ekran uskoku
Układ menu Jog
| Przedmiot | Opis | |
|---|---|---|
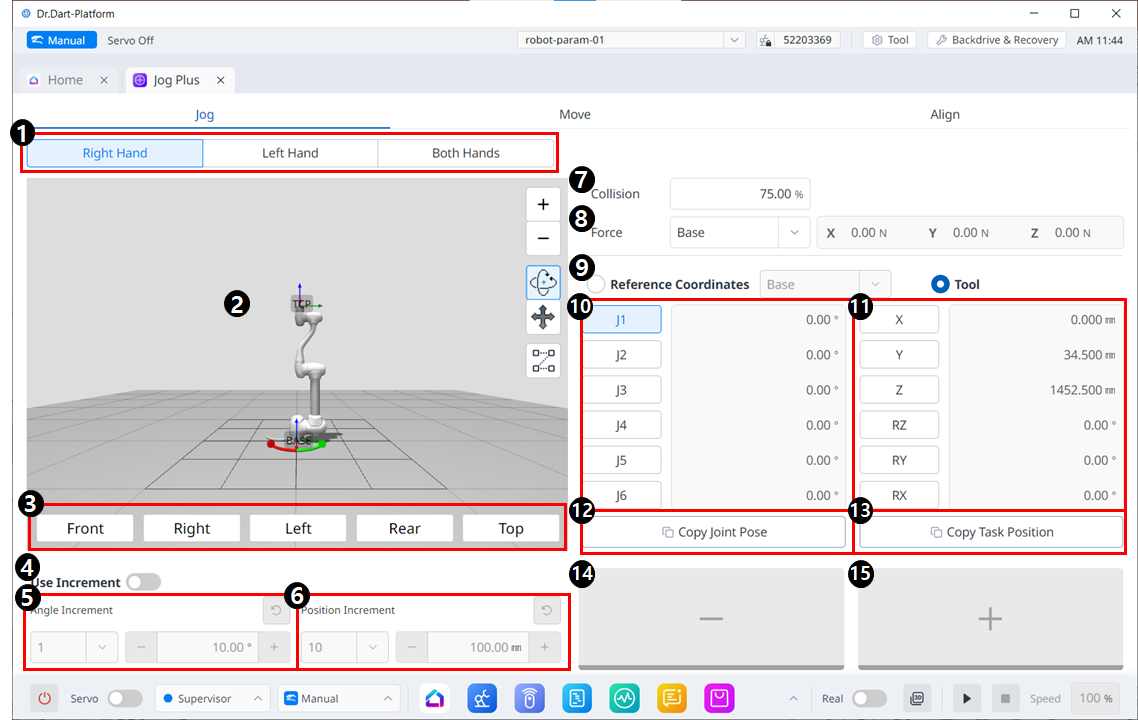
| 1 | Wybierz typ panelu | Możesz wybrać lokalizację przycisku przenoszenia. |
| 2 | Symulacja 3D | To jest przeglądarka 3D, w której możesz zobaczyć, jak robot wygląda. |
| 3 | Wyrównanie symulatora | Możesz wykorzystać tę sekcję do sterowania symulatorem. |
4 | Użyj przyrostu | Ten przycisk umożliwia włączenie przyrostów kąta lub pozycji. |
| 5 | Przyrost kąta | W tej sekcji ustawia się przyrost kąta na wybranej osi. |
| 6 | Przyrost pozycji | W tej sekcji ustawia się przyrost pozycji na wybranej osi. |
| 7 | Kolizja | W tym polu ustawiasz kolizję robota. |
| 8 | Monitorowanie siły | W tej sekcji ustawiasz siły w osiach X, Y i Z w oparciu o bazę, narzędzie, świat, odniesienie i inne. |
| 9 | Wybierz układ współrzędnych odniesienia | Wybierz układ współrzędnych odniesienia, aby wyświetlić lub przesunąć współrzędne zadania na rysunku 11. Mogą to być współrzędne podstawowe, światowe lub użytkownika. |
| 10 | Wspólny panel | Można wybrać oś połączenia do impulsowania. |
| 11 | panelu zadań | Można wybrać oś zadania do impulsowania. |
| 12 | Przycisk Kopiuj pozę J | Ten przycisk umożliwia skopiowanie pozycji J. |
| 13 | Przycisk Kopiuj pozę X | Ten przycisk umożliwia skopiowanie pozycji X. |
| 14 | Przesuń - Przycisk | Możesz ustawić robota w kierunku - w oparciu o każdą oś. W tym momencie możesz określić kierunek - i + w symulacji 3D po lewej stronie. |
| 15 | Przesuń + przycisk | Możesz ustawić robota w kierunku + w oparciu o każdą oś. W tym momencie możesz określić kierunek - i + w symulacji 3D po lewej stronie. |