
Wyrównanie na bazie punktu docelowego
Ta funkcja jest użyteczna, jeśli obrabiany przedmiot jest wyrównany z TCP w kierunku osi wykorzystywanej do uczenia obrabianego przedmiotu. Aby wykonać uczenie po zablokowaniu pozycji, należy skorzystać z funkcji uczenia bezpośredniego na podstawie płaszczyzny lub linii zablokowanego położenia, używając przycisków kokpitu.
Aby wyrównać TCP robota na bazie punktu docelowego, należy:
- Należy wybrać kartę Align, a następnie kartę Parallel To Taget.
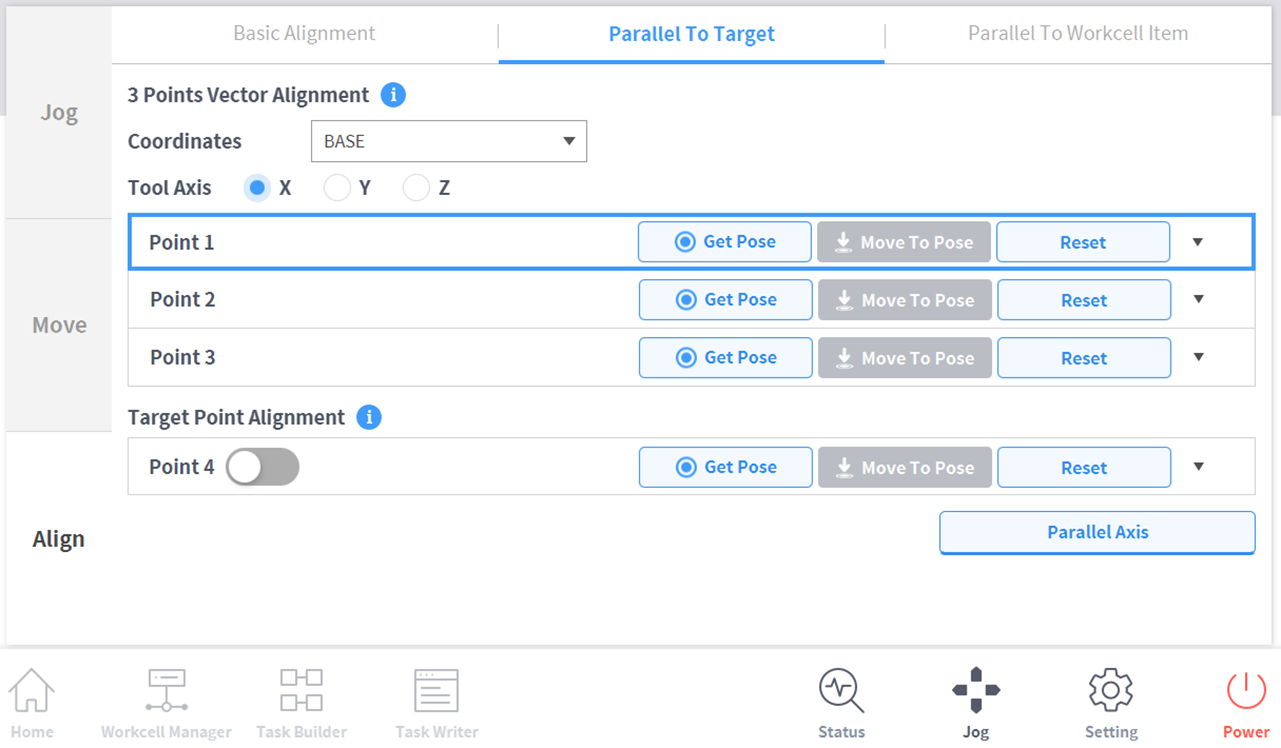
- Wybrać współrzędne odniesienia do wyrównania.

- Wybrać oś narzędzia do wyrównania.

- Przestawić robota do żądanej pozycji i nacisnąć Point 1.
- Nacisnąć przycisk Save Pose przy Point 1.
- Point 2 i Point 3 są ustawiane w taki sam sposób. Po zakończeniu określania ustawień system tworzy wirtualny obszar wektorowy na podstawie trzech punktów.

- Point 2 i Point 3 są ustawiane w taki sam sposób. Po zakończeniu określania ustawień system tworzy wirtualny obszar wektorowy na podstawie trzech punktów.
- (Opcjonalnie) Aby ustawić kierunek TCP i pozycję jednocześnie, należy nacisnąć przycisk „Toggle” przy Point 4, przestawić robota w żądane położenie i nacisnąć przycisk „Save Pose”.
- Nacisnąć i przytrzymać przycisk Align Axis, aby wyrównać oś.
- Ustawić głowicę 6-osiową o 150 mm powyżej punktu docelowego w kierunku osi Z.