
Wyrównanie na bazie osi podstawy/osi globalnej
Gdy obrabiany przedmiot jest ustawiony w kierunku osi podstawy/osi globalnej robota, można wyrównać TCP na przedmiocie obrabianym przed uczeniem obrabianego przedmiotu. Pozycję uczenia można skonfigurować zgodnie z osią współrzędnych podstawy/współrzędnych globalnych, co ułatwia określenie pozycji uczenia. Aby wykonać uczenie po zablokowaniu pozycji, należy skorzystać z funkcji uczenia bezpośredniego na podstawie płaszczyzny lub linii zablokowanego położenia, używając przycisków na kokpicie.
Aby wyrównać TCP robota na bazie osi podstawy, należy:
- Wybrać kartę Align, a następnie kartę Basic Alignment.
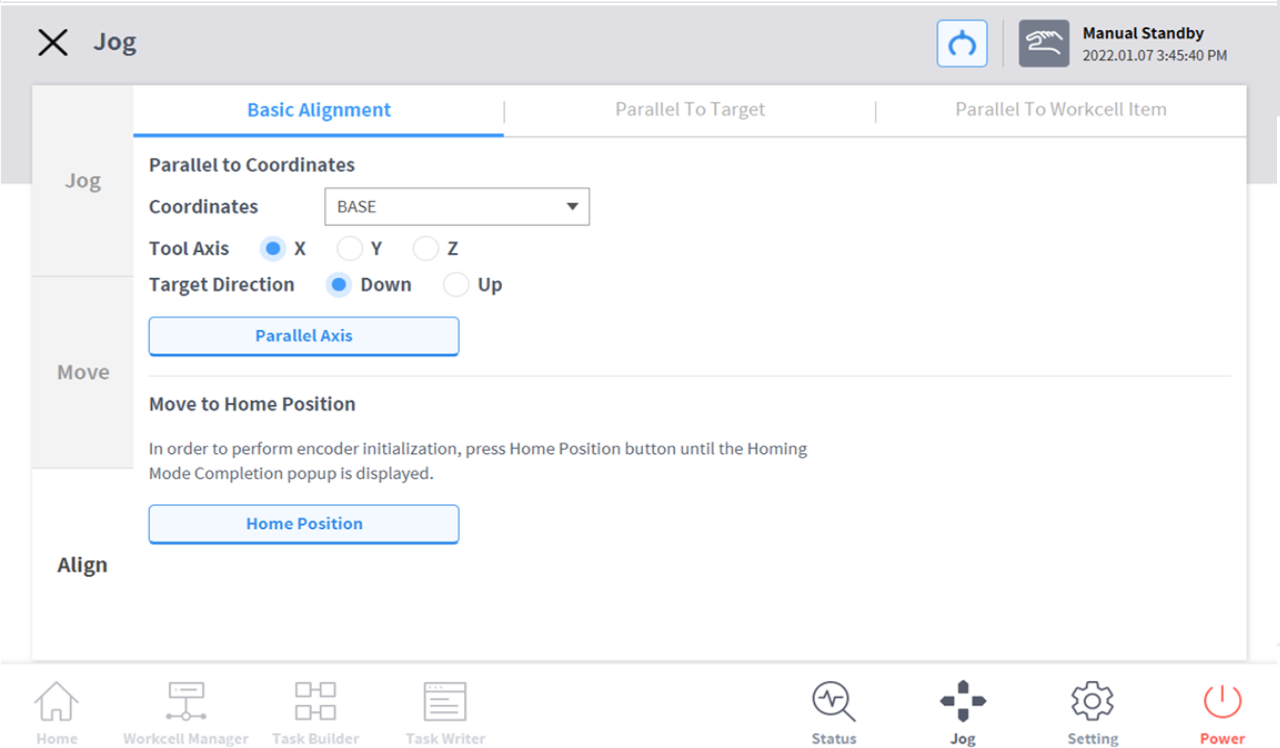
- Wybrać współrzędne odniesienia do wyrównania.

- Wybrać oś odniesienia dla narzędzia.

- Wybrać kierunek wyrównania.

- Nacisnąć i przytrzymać przycisk Align Axis, aby wyrównać oś.