Ustawienia zdalnego sterowania
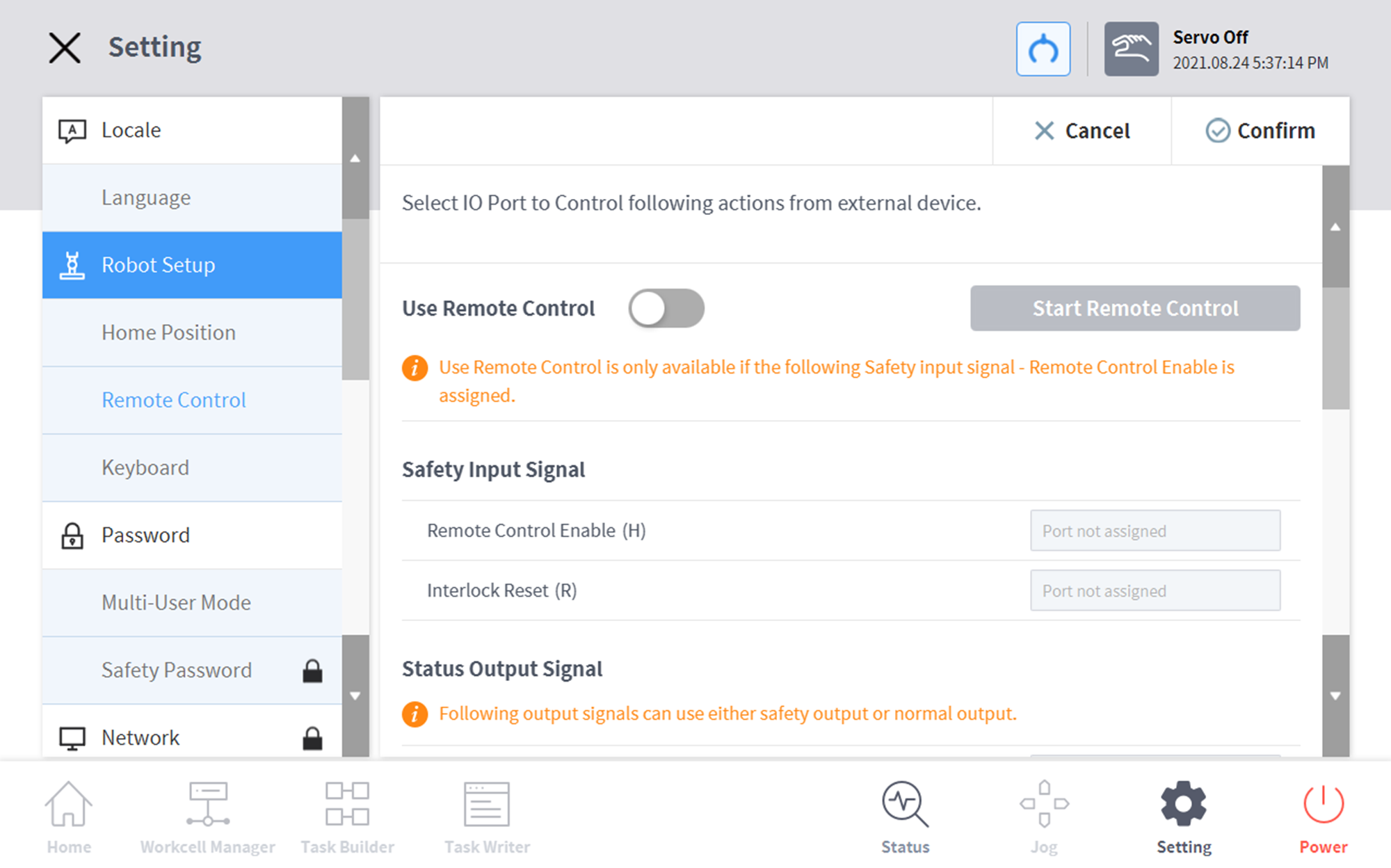
- Wybrać Remote Control w menu Setting > Robot Setup.
- Bieżące informacje o ustawieniach są wyświetlane w oknie zarządzania ustawieniami.
- Ustawić przycisk Use Remote Control na ON.
- Po ponownym uruchomieniu systemu za pomocą zdalnego sterowania ustawionego na ON system uruchamia się w trybie zdalnego sterowania.
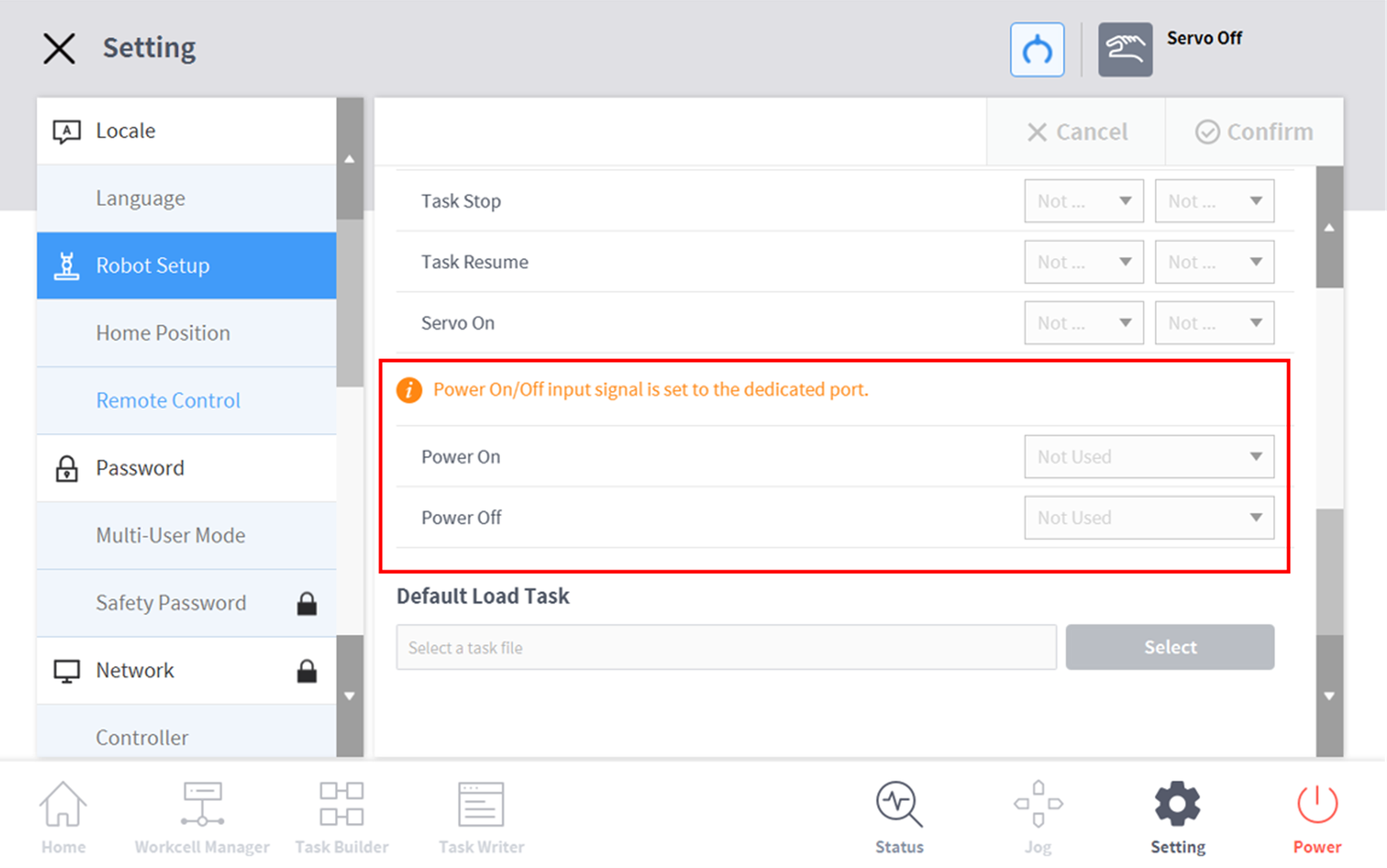
- Wprowadzić wartości sygnału wyjściowego, sygnału wejściowego i domyślnie wczytanego zadania.
- Jeśli sygnał wejściowy nie jest ustawiony, nie można dokonać ustawień. Na karcie Workcell Manager > Safety I/O > Input Edit > wybierz Port > Configure Remote Control Enable(H).
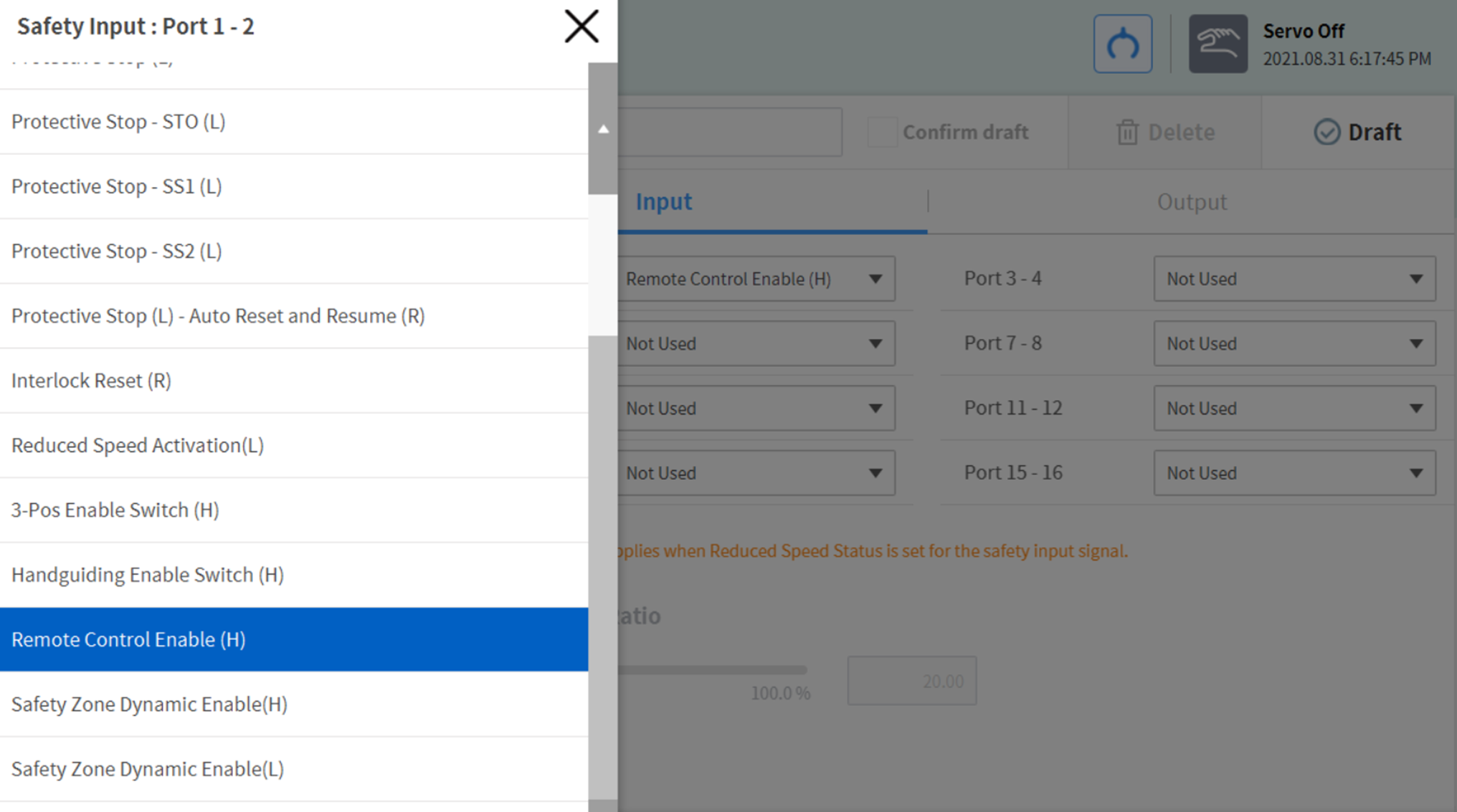
- Jeśli sygnał wejściowy nie jest ustawiony, nie można dokonać ustawień. Na karcie Workcell Manager > Safety I/O > Input Edit > wybierz Port > Configure Remote Control Enable(H).
- Po zakończeniu dotknąć przycisku Confirm.
- Ta czynność kończy wprowadzanie ustawień środowiskowych zdalnego sterowania.
- Aby umożliwić zdalne sterowanie za pomocą zewnętrznego urządzenia, należy nacisnąć przycisk Start Remote Control, aby włączyć tryb zdalnego sterowania.
- Pojawią się informacje dotyczące zadania do wykonania, pochodzące z zewnętrznego urządzenia.
- Wejścia ruchu z zewnętrznego urządzenia można wykonać, jeśli na przycisku „Enable Remote Control” wyświetlony jest zielony wskaźnik.
- Jeśli na przycisku Enable Remote Control jest wyświetlany czerwony wskaźnik, sygnał aktywacji należy doprowadzić z zewnętrznego urządzenia.
Uwaga
- Jeśli w trybie zdalnego sterowania wystąpi zatrzymanie awaryjne lub zatrzymanie ochronne, należy postępować w następujący sposób:
- Zatrzymanie awaryjne: Zostanie wyświetlone okno dialogowe zatrzymania awaryjnego. Po wyeliminowaniu przyczyny zatrzymania awaryjnego – wyciągnięciu lub obróceniu wyłącznika awaryjnego w celu zresetowania – wyskakujące okno zamyka się automatycznie.
- Zatrzymanie ochronne powodujące przejście do stanu Servo Off: Zostanie wyświetlone czerwone okno dialogowe zatrzymania ochronnego. Jeśli sygnał Servo On zostanie wprowadzony po usunięciu przyczyny zatrzymania ochronnego, włączą się serwonapędy robota i automatycznie zamknie się wyskakujące okno.
- Zatrzymanie ochronne powodujące przejście do stanu Interrupted: Zostanie wyświetlone żółte okno dialogowe zatrzymania ochronnego. Jeśli sygnał Interlock Reset zostanie wprowadzony po wyeliminowaniu przyczyny zatrzymania ochronnego, stan robota zmieni się na zwykły stan gotowości – Manual Standby, Auto Standby lub HGC standby.
W przypadku naruszeń bezpieczeństwa, których przyczyny nie można usunąć bez przestawienia robota, można użyć funkcji Luzowanie zacisku przez kokpit. - Aby uzyskać szczegółowe informacje na temat statusu dla każdego trybu, zapoznaj się z „ Stan i kolor wskaźnika LED kołnierza w poszczególnych trybach
- Można włączyć/wyłączyć zasilanie robota za pomocą pilota.
- Naciśnij przycisk Settings w menu głównym i wybierz Remote Control w obszarze Robot Settings.
- Wybierz dedykowany port wejściowy dla pilota, który ma być używany do funkcji Power On i Power Off.