Spróbuj wymusić użycie próbek poleceń
OPCJONALNIE NORMALNY 20 MIN

Próbka ta jest tworzona w aplikacji Task Writer (Writer zadań). Próbkę tę można spróbować prawie w ten sam sposób w narzędziu Task Builder.
PRZESTROGA
- Przed próbą pobrania próbki należy przeczytać i postępować zgodnie Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz CZĘŚĆ 1. Podręcznik bezpieczeństwa.
- Ta próbka wymaga pliku programu Task Writer utworzonego w Wypróbuj przykłady poleceń zgodnościprogramie .
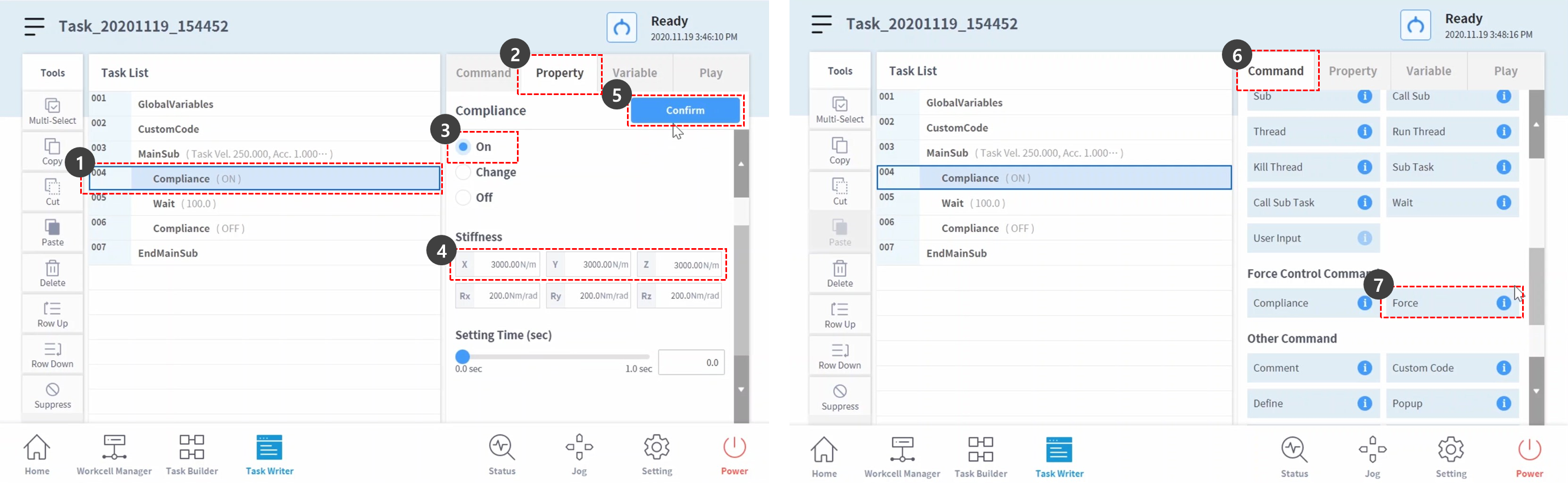
- Wypróbuj przykłady poleceń zgodności Otwórz utworzony plik programu Task Writer i wybierz polecenie zgodności w czwartym wierszu listy zadań.
- Wybrać kartę właściwość.
- Ustaw tryb w następujący sposób: Tryb włączony umożliwia kontrolę zgodności. Polecenie Wymuś jest dostępne tylko wtedy, gdy włączona jest kontrola zgodności.
- Tryb: WŁ
- Ustawić domyślną wartość sztywności jako:
- X, Y, Z: 3000 N/m (domyślnie)
- Rx, ry, Rz: 200 Nm/rad (domyślnie)
- Nacisnąć przycisk zatwierdzania.
- Wybrać kartę polecenie.
- Dodać polecenie siły. Polecenie to jest planowane do użycia w celu włączenia sterowania siłą.
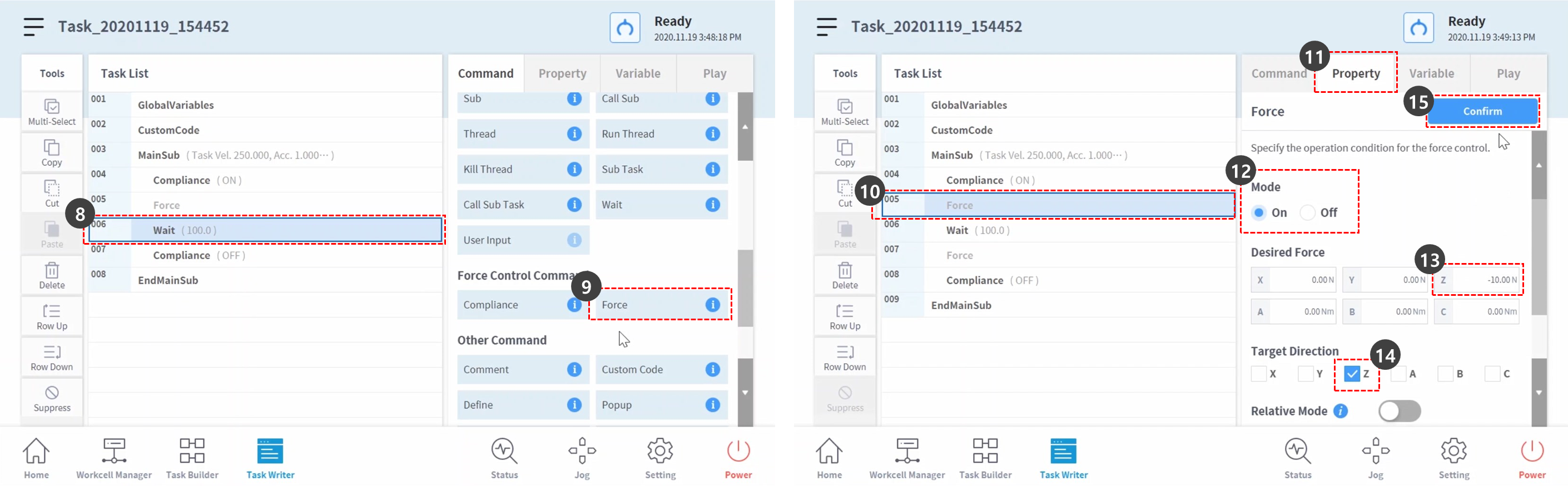
- Wybierz szósty wiersz listy zadań.
- Dodać polecenie siły. Polecenie to jest planowane do użycia w celu wyłączenia sterowania siłą.
- Wybrać polecenie wymuszenia z piątego wiersza listy zadań.
- Wybrać kartę właściwość.
- Ustaw tryb w następujący sposób: Tryb włączony włącza sterowanie siłą.
- Tryb: WŁ
- Ustawić żądaną siłę w następujący sposób:
- X: 0 N (domyślnie)
- Y: 0 N (domyślnie)
- Z: -10 N
- Rx, ry, Rz: 200 Nm/rad (domyślnie)
- Sprawdzić tylko oś z w kierunku docelowym.
- Nacisnąć przycisk zatwierdzania.
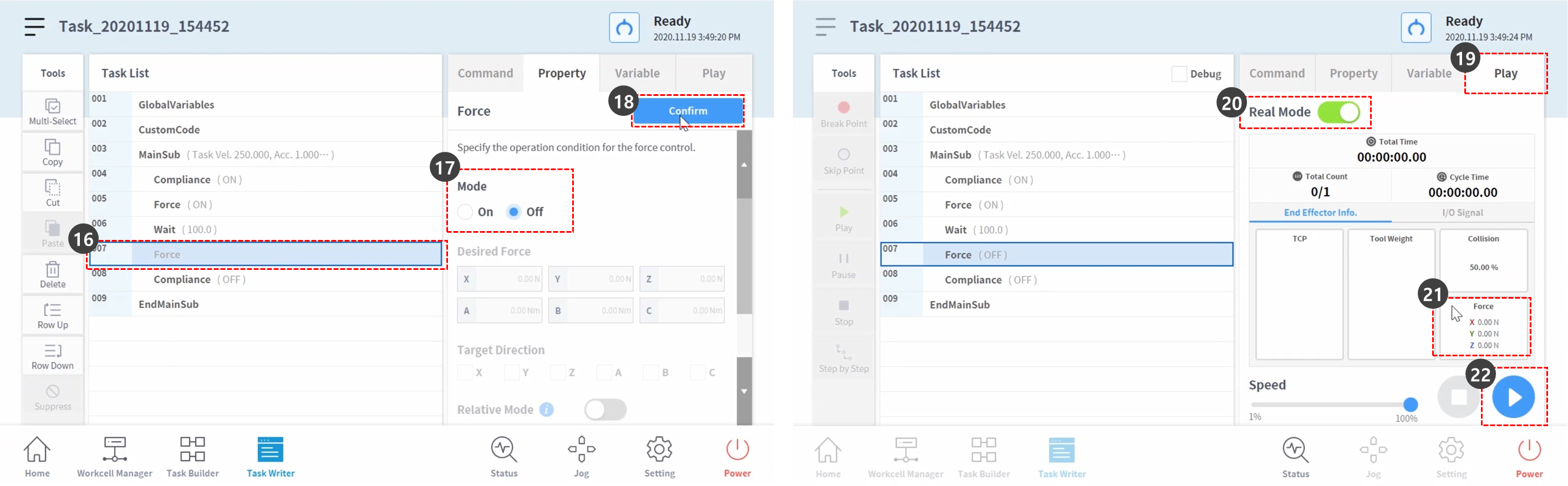
- Wybrać polecenie wymuszenia z siódmego wiersza listy zadań.
- Ustaw tryb w następujący sposób: Tryb wyłączony wyłącza sterowanie siłą.
- Tryb: Wył
- Nacisnąć przycisk zatwierdzania.
- Wybierz kartę Odtwórz.
- Włącz przycisk przełączania trybu Real Mode.
- Gdy przycisk przełączania zostanie włączony, przycisk zaświeci się na zielono.
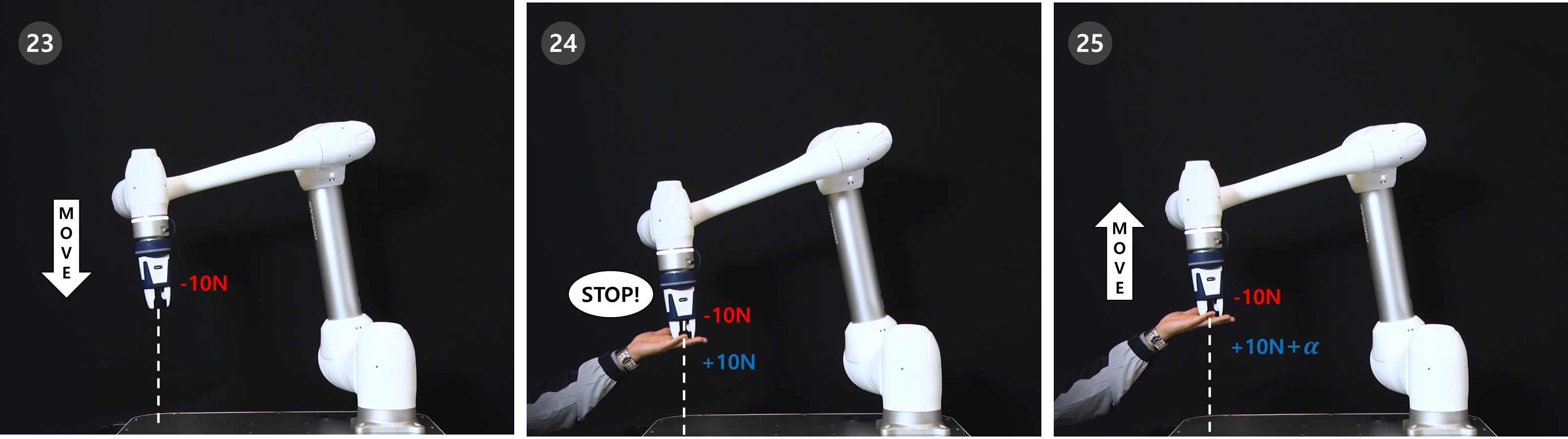
- Sprawdź, czy siła TCP każdej osi wynosi 0. Ta wartość siły jest rozmiarem siły zewnętrznej aktualnie stosowanej na końcu protokołu TCP robota.
- Naciśnij przycisk odtwarzania.
- -10N siły jest stosowany na końcu TCP robota, powodując, że robot powoli porusza się w kierunku osi Z.
- Koniec robota odpycha ruch robota w kierunku osi +z, w kierunku przeciwnym do kierunku ruchu robota. Gdy siła poruszająca robota i siła odpychająca ruch robota osiągną równowagę, robot utruga w pozycji, jakby się zatrzymać.
- Jeśli na robot zostanie przyłożona siła większa niż +10N, robot będzie zgodny z siłą przyłożonej do robota i będzie się poruszał w kierunku siły.