Wypróbuj przykłady poleceń zgodności
OPCJONALNIE NORMALNY 20 MIN

Próbka ta jest tworzona w aplikacji Task Writer (Writer zadań). Próbkę tę można spróbować prawie w ten sam sposób w narzędziu Task Builder.
PRZESTROGA
- Przed próbą pobrania próbki należy przeczytać i postępować zgodnie Środki ostrożności dotyczące użytkowaniaz instrukcjami . Aby uzyskać więcej informacji, patrz CZĘŚĆ 1. Podręcznik bezpieczeństwa.
Uwaga
- Jeśli podczas włączania lub wyłączania kontroli zgodności występuje zewnętrzny moment obrotowy 15 Nm lub wyższy, robot zatrzymuje program z powodu błędu JTS (Joint Torque Sensor).
- Zmiana sztywnosc mozna zaciagac bez wzgl du na zewnętrzny rozmiar momentu obrotowego.
- Podczas kontroli zgodności nie można wykonywać wspólnych ruchów, takich jak polecenie MoveJ.
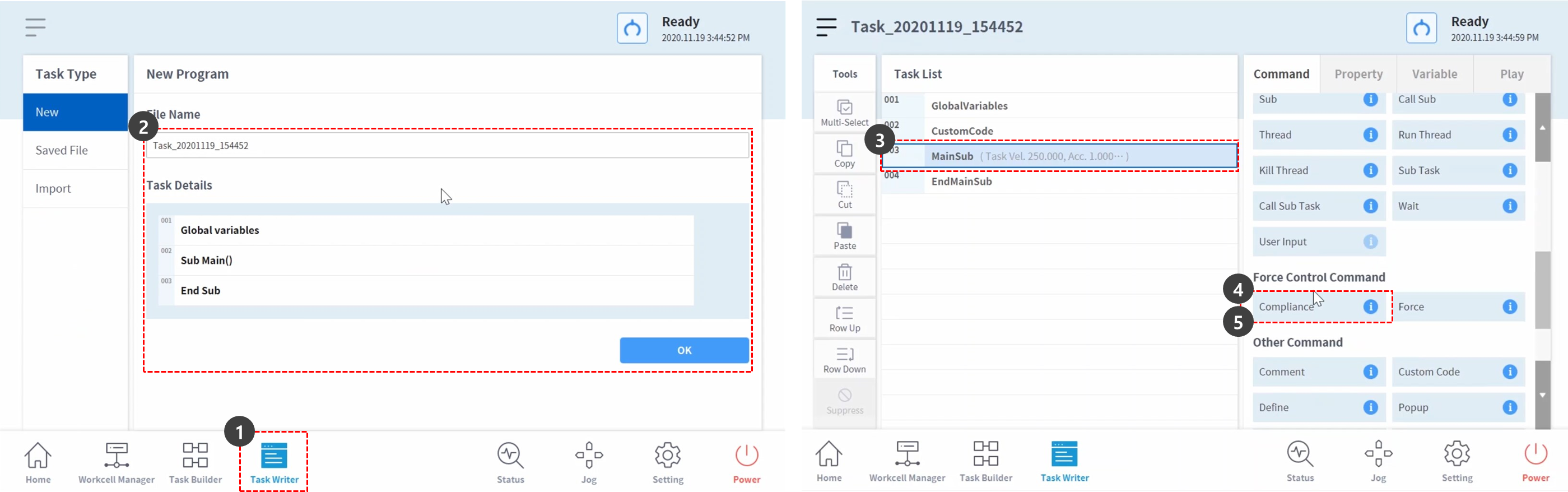
- Z dolnego menu wybierz opcję Task Writer (Writer zadań).
- Wprowadź nazwę zadania i naciśnij przycisk OK.
- Wybierz polecenie MainSue z trzeciego wiersza listy zadań. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
- Dodaj polecenie zgodności. To polecenie jest planowane do użycia w celu włączenia kontroli zgodności.
- Dodaj kolejną kontrolę zgodności. To polecenie jest planowane do użycia w celu wyłączenia kontroli zgodności.
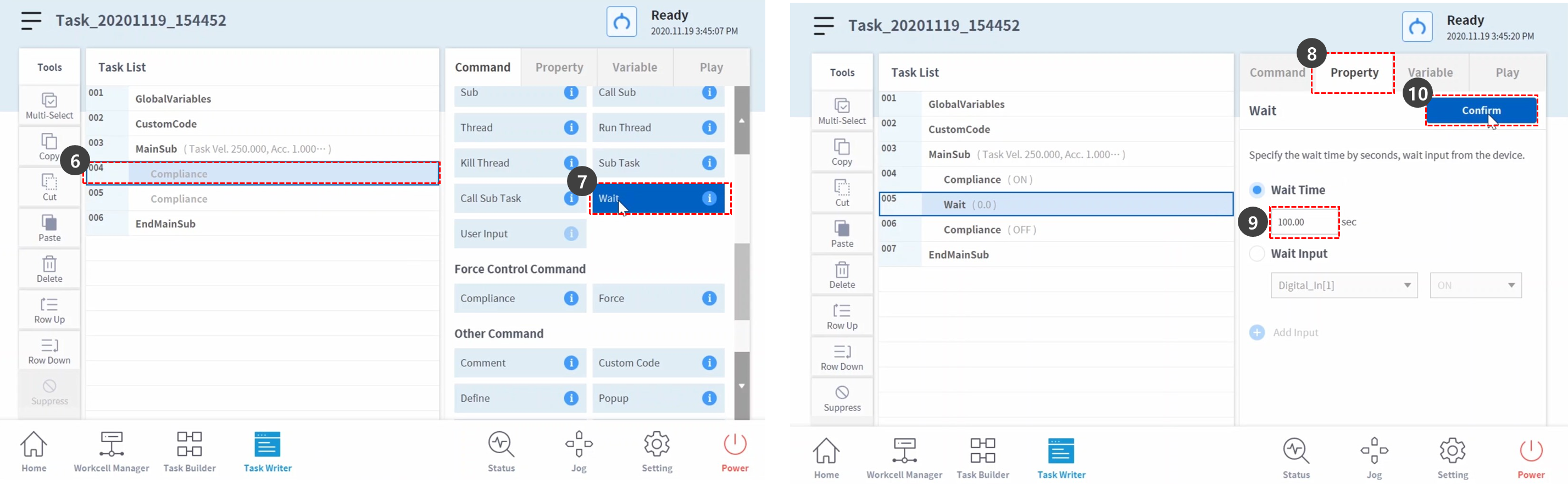
- Wybierz polecenie zgodności w czwartym wierszu. Nowe polecenie zostanie dodane do następnego wiersza wybranego wiersza.
- Dodaj polecenie Czekaj.
- Wybrać kartę właściwość.
- Ustaw czas oczekiwania w następujący sposób:
- Czas oczekiwania: 100 sek
- Nacisnąć przycisk zatwierdzania.
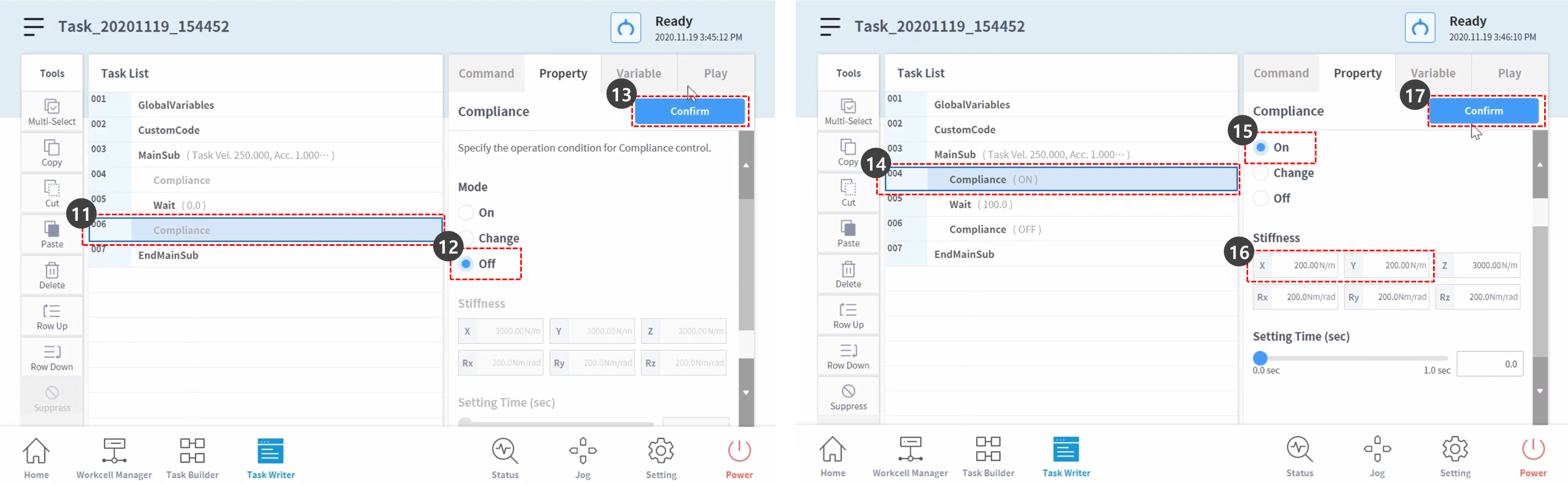
- W szóstym wierszu wybierz polecenie zgodności.
- Ustawić tryb we właściwości jako: Tryb wyłączony wyłącza kontrolę zgodności.
- Tryb: Wył
- Nacisnąć przycisk zatwierdzania.
- Wybierz polecenie zgodności w czwartym wierszu.
- Ustawić Tryb we właściwości jako: Włączenie trybu powoduje włączenie kontroli zgodności.
- Tryb: WŁ
- Ustawić Styczność w następujący sposób: Zmniejsz sztywność kierunku X i Y, aby uzyskać bardziej miękkie reakcje w kierunkach X i Y.
- X: 200 N/m.
- Y: 200 N/m.
- Z: 3000 N/m (domyślnie)
- Rx, ry, Rz: 200 Nm/rad (domyślnie)
- Nacisnąć przycisk zatwierdzania.
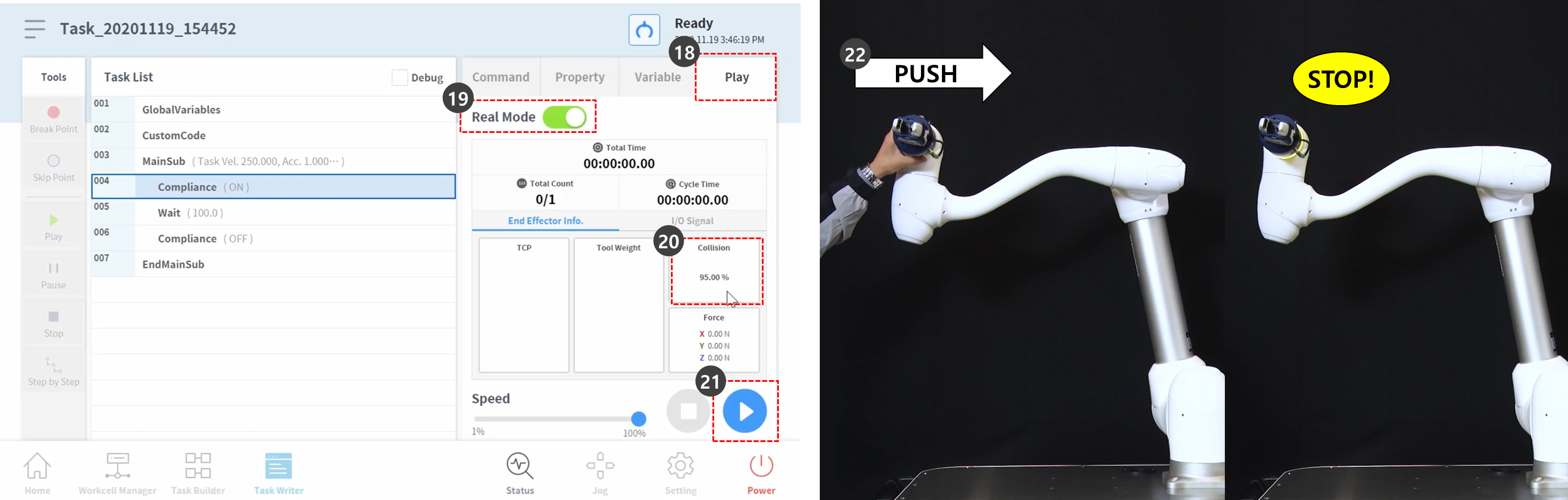
- Wybierz kartę Odtwórz.
- Włącz przycisk przełączania trybu Real Mode.
- Gdy przycisk przełączania zostanie włączony, przycisk zaświeci się na zielono.
- Próbka ta celowo aktywuje blokadę bezpieczeństwa, aby wyjaśnić przyczynę obniżenia czułości kolizji podczas kontroli zgodności. Czułość kolizyjna tej próbki wynosi 95%. W przypadku tak wysokiej czułości na kolizję, robot reaguje bardzo rozczucie na kolizję.
- W przypadku kolizji robot jest zatrzymywany przez ogranicznik bezpieczeństwa.
- Naciśnij przycisk odtwarzania.
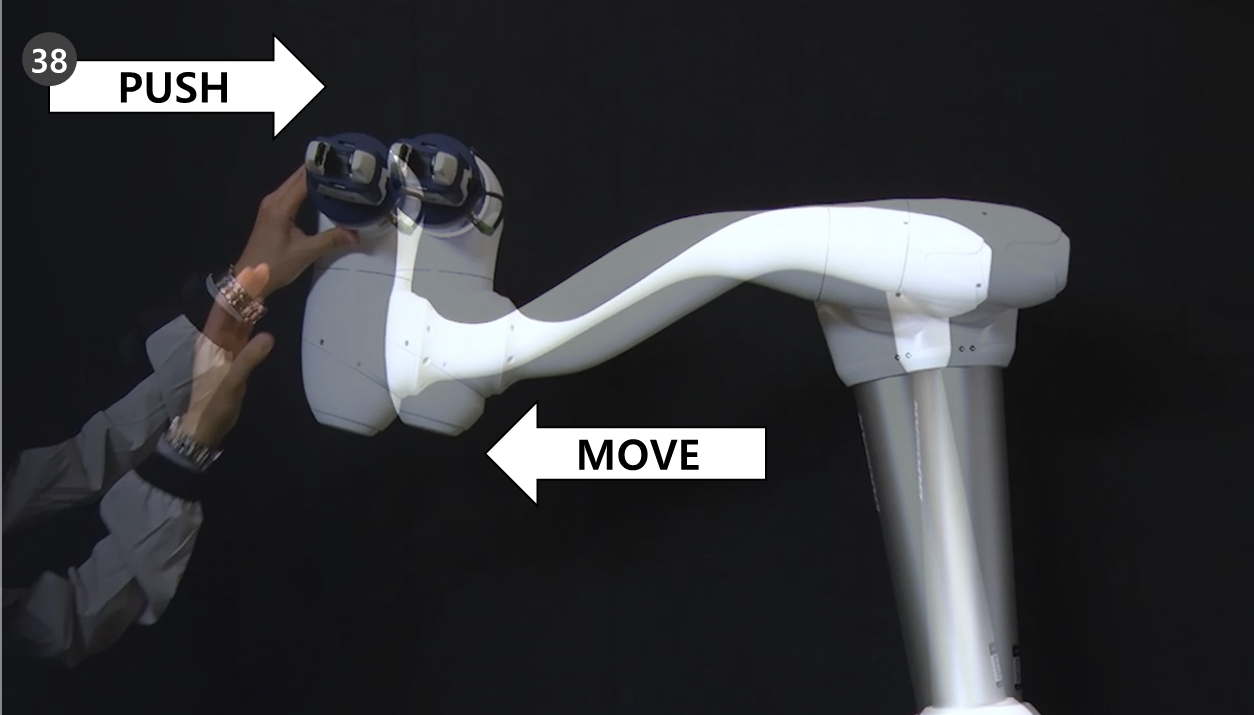
- Przytrzymać koniec robota i powoli popchnąć go w kierunku korpusu robota. Robot zatrzymuje się z powodu błędu kolizji. Podczas zatrzymania bezpieczeństwa w wyniku kolizji dioda LED robota świeci na żółto.
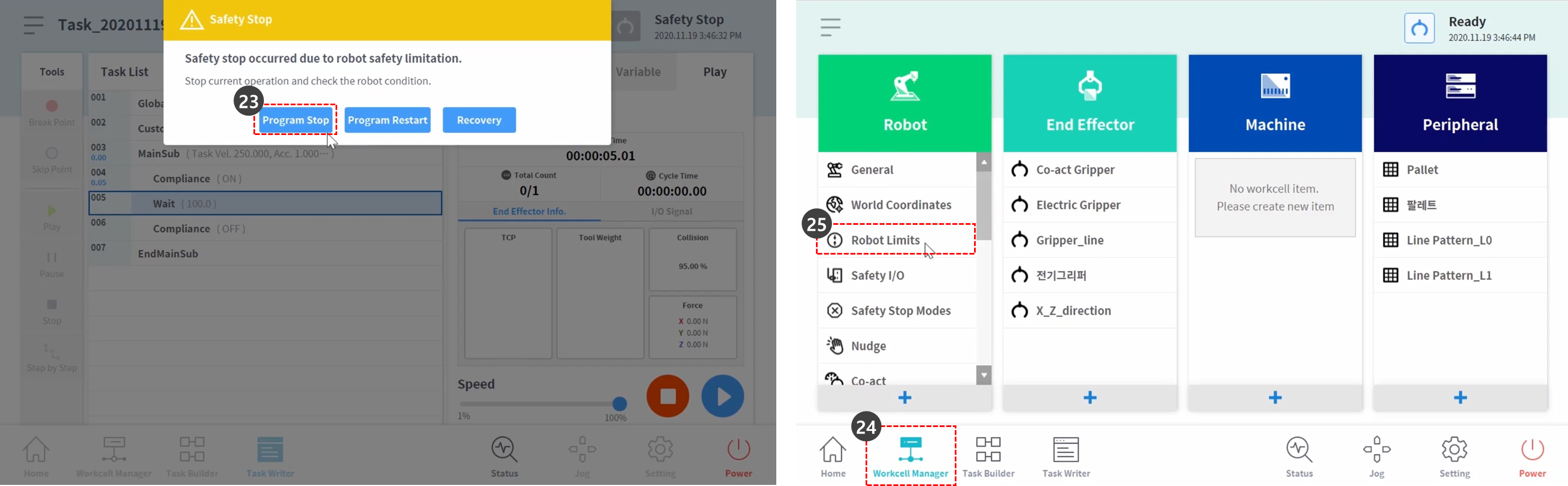
- Nacisnąć przycisk zatrzymania programu w żółtym oknie ostrzegawczym zatrzymania awaryjnego na ekranie. Program zadań w toku jest zatrzymany.
- Z dolnego menu wybierz Menedżer komórek roboczych.
- Wybierz kolejno Robot > limity robota.
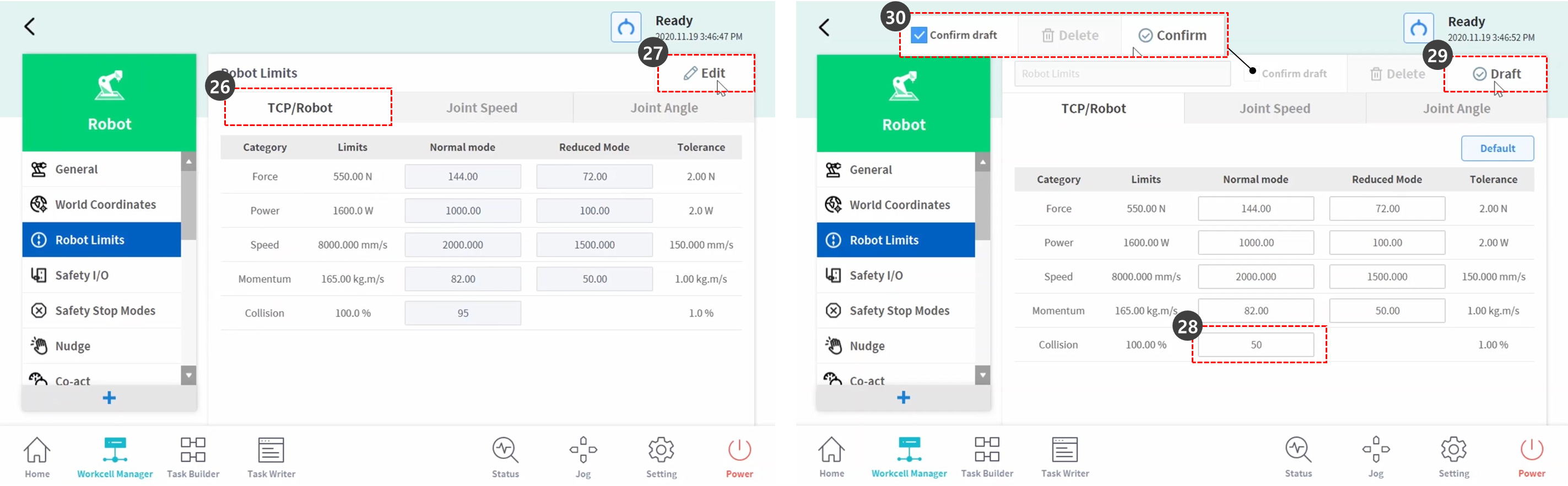
- Wybierz kartę TCP/Robot.
- Naciśnij przycisk Edytuj.
- Ustaw czułość kolizji w następujący sposób:
- Tryb normalny: 50 %
- Naciśnij przycisk Draft.
- Zaznaczyć pole wyboru Potwierdź pochylenie i nacisnąć przycisk Potwierdź.
- Z dolnego menu wybierz opcję Task Writer (Writer zadań).
- Wybierz zapisany plik z lewej strony ekranu.
- Przed wybraniem opcji sprawdź, czy nazwa pierwszego pliku zadania jest nazwą zadania w kroku 2. Ostatnio zapisane zadanie znajduje się na górze listy plików programu Task Writer.
- Naciśnij przycisk Otwórz.
- Wybierz kartę Odtwórz.
- Włącz przycisk przełączania trybu Real Mode.
- Naciśnij przycisk odtwarzania.
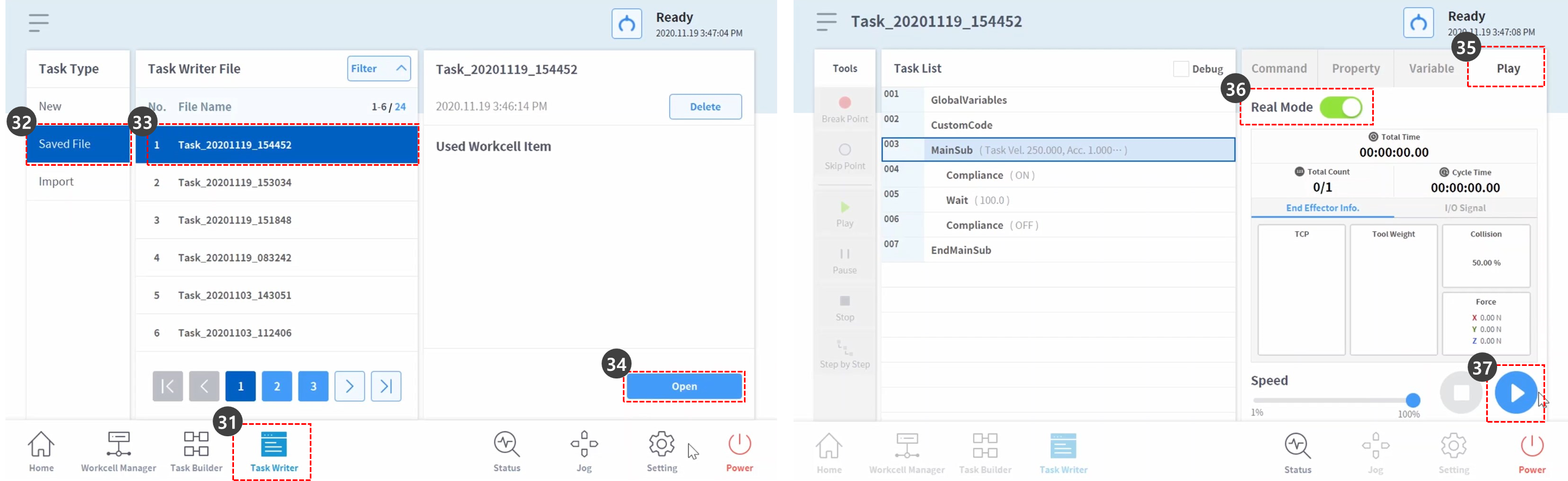
- Przytrzymać koniec robota i powoli popchnąć go w kierunku korpusu robota. Robot porusza się z powodu siły pchającej i powraca do pierwotnej pozycji.