
Ruch za pomocą współrzędnych odniesienia dla współrzędnych globalnych
Aby robot wykonał ruch na bazie współrzędnych globalnych, należy:
- Wybrać kartę Move, a następnie kartę Task
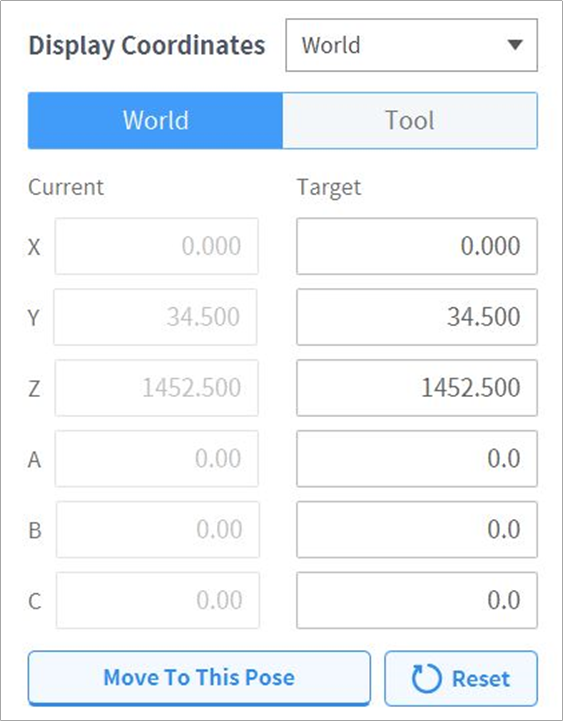
- Zaznaczyć World jako współrzędne wyświetlania i wybrać kartę World.
- Ustawić pozycję, do której ma odbywać się ruch w odniesieniu do współrzędnych globalnych.
- Nacisnąć i przytrzymać przycisk Move to Corresponding Pose, aby przejść do ustawionej współrzędnej.