
Element komórki roboczej - Dodaj pozycję instalacji robota (montaż)
OPCJONALNIE ŁATWE 3 MIN
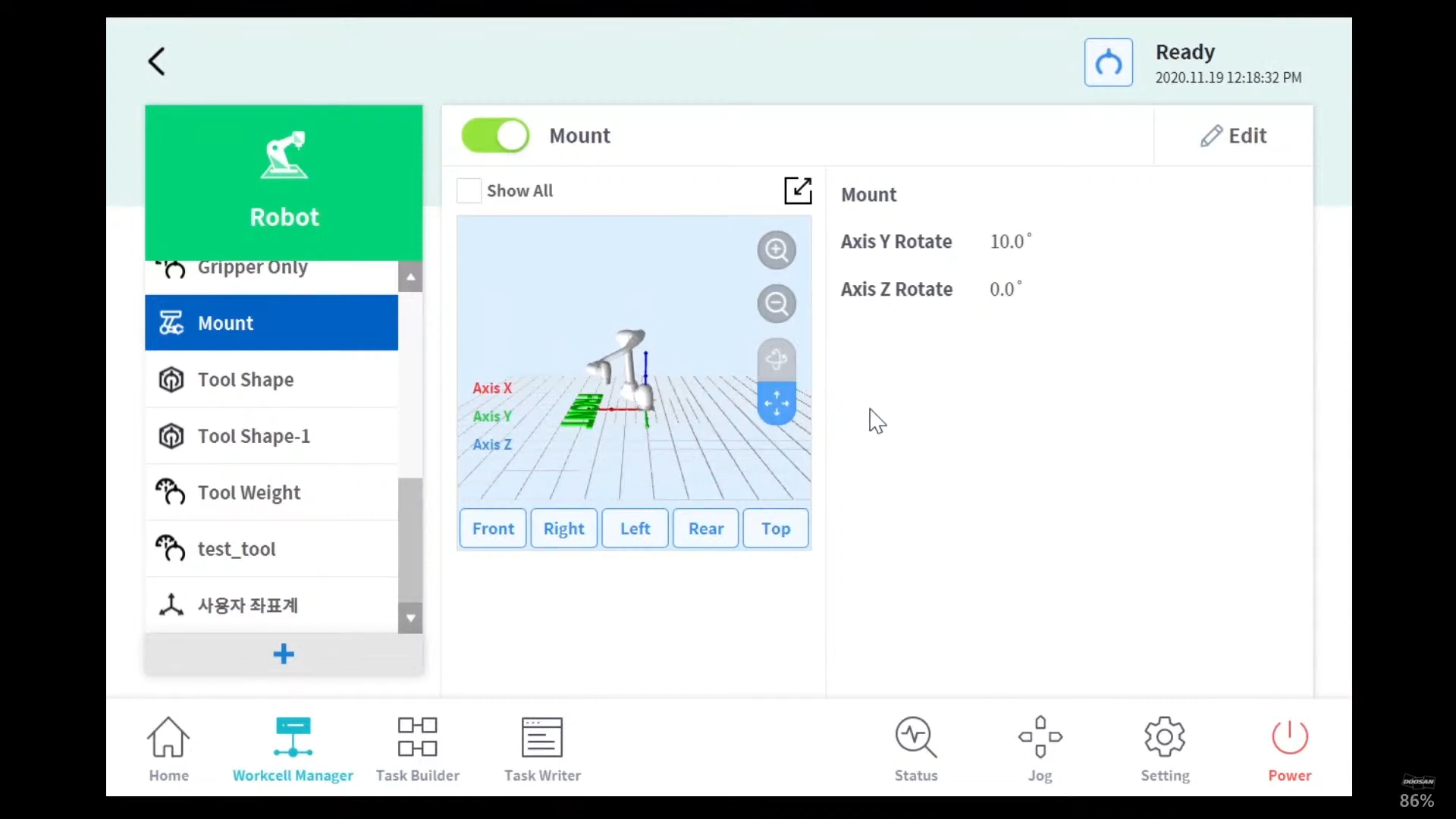
Pozycję instalacji robota można ustawić, dodając element komórki roboczej pozycji instalacji robota (Mount). Jeśli robot jest zainstalowany na płaskiej powierzchni, krok ten można pominąć.
Pozycję instalacji robota można ustawić za pomocą Menedżera komórek roboczych > Robot > 
- Kąt instalacji można zmierzyć za pomocą funkcji pomiarów automatycznych. Jeśli jednak kąt jest mniejszy niż 5 stopni, pomiar automatyczny jest niedostępny.
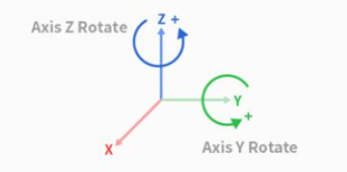
- Jeśli robot jest zainstalowany na suficie lub ścianie, kąt instalacji robota można ustawić za pomocą obrotów osi Y i osi Z.
- Ponieważ automatyczne obliczanie masy narzędzia jest wykonywane w oparciu o grawitację, zaleca się zresetowanie wagi narzędzia po zakończeniu ustawiania.
Po zarejestrowaniu (potwierdzeniu) elementu komórki roboczej przełącznik dwustabilny musi być włączony, aby można było użyć elementu komórki roboczej.
PRZESTROGA
- Podczas ustawiania pozycji instalacji robota (Mount) element komórki roboczej zaleca się również zmianę współrzędnych świata. Jeśli współrzędne świata nie zostaną zmienione, robot znajdujący się na ekranie symulatora robota manipulatora danych będzie wyświetlany jako robot instalowany na płaskiej powierzchni (podstawowej).