
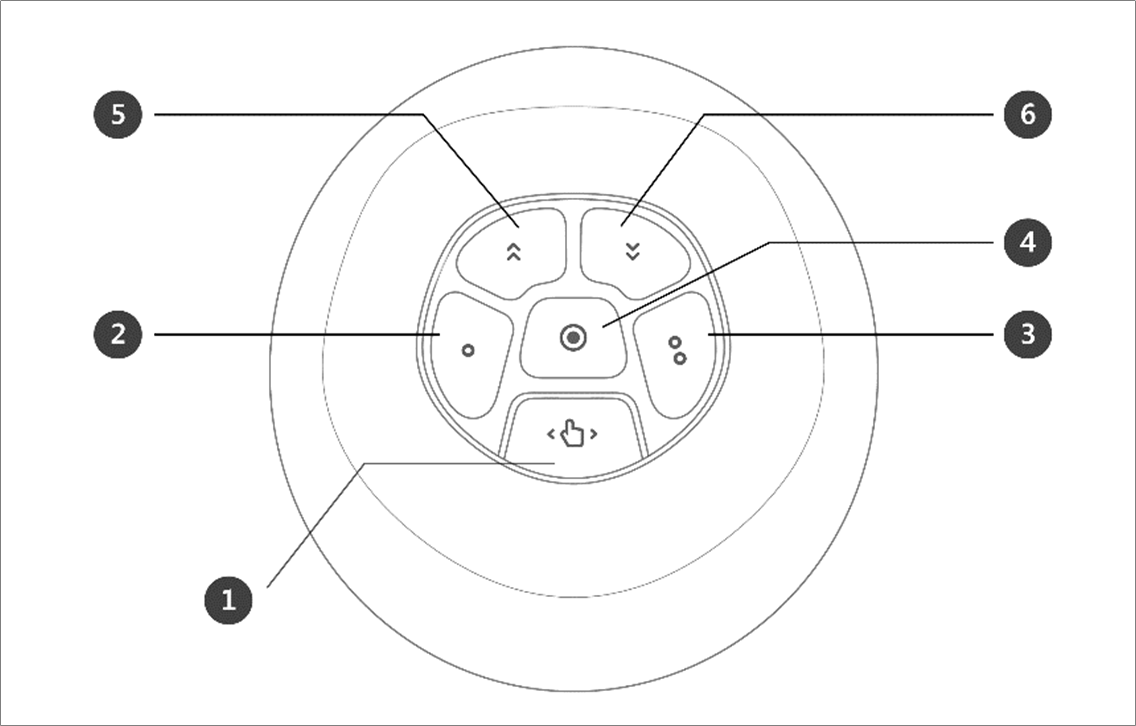
Przycisk kokpitu (sześć przycisków)
Lp | Element | Opis |
|---|---|---|
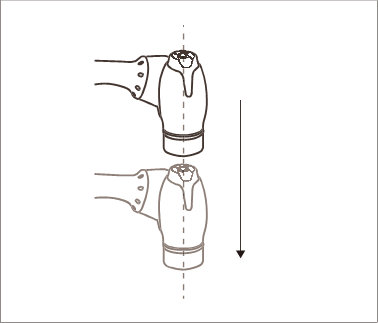
1 | Hand-Guiding Button | Przycisk służy do regulacji lub zmiany pozycji robota. |
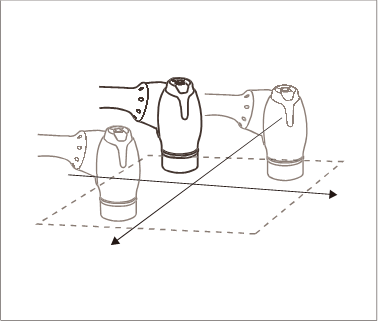
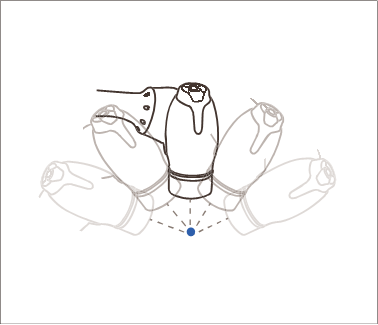
2,3 | User Setting Button | Za pomocą tego przycisku można zmieniać pozycję robota, podając pozycję zgodnie ze stanem blokady odpowiadającej trybowi.
Zobacz „Ustawienia kokpitu”, aby uzyskać więcej informacji na temat tych ustawień. |
4 | Save Pose Button | Zapisuje bieżącą pozycję robota. Aby uzyskać więcej informacji, zobacz „Ustawianie punktu roboczego polecenia umiejętności za pomocą przycisków kokpitu” |
5 | One Line Up | Przesuwa powiększenie wyświetlane na ekranie o jeden wiersz w górę. |
6 | One Line Down | Przesuwa powiększenie wyświetlane na ekranie o jeden wiersz w dół. |
Uwaga – zmiana ustawień kokpitu



- Naciśnięcie przycisku Save Pose na ekranie Skill Setting spowoduje automatyczne przesunięcie powiększonego obszaru do następnej pozycji.
- Z przycisku anulowania można korzystać wyłącznie w oknie Skill Setting, które służy do zarządzania wieloma pozycjami.