
Moduł Jog Plus
Użytkownik może wybrać ręczną metodę ruchu na karcie Usunięcie.
Uskok: Przenosi połączenie robota lub TCP do osi połączenia lub osi współrzędnych wybranej przez użytkownika
Przenieś: Przenosi połączenie robota lub TCP do punktu docelowego wprowadzonego przez użytkownika
Ruch robota składa się z dwóch typów.
Wspólny ruch: Przesuwa on każde połączenie liniowo ruchem obrotowym
Ruch zadania: Przesuwa on koniec liniowo do punktu docelowego
Poniżej przedstawiono metodę przemieszczania robota za pomocą ruchu przegubowego z ekranu uskoku:
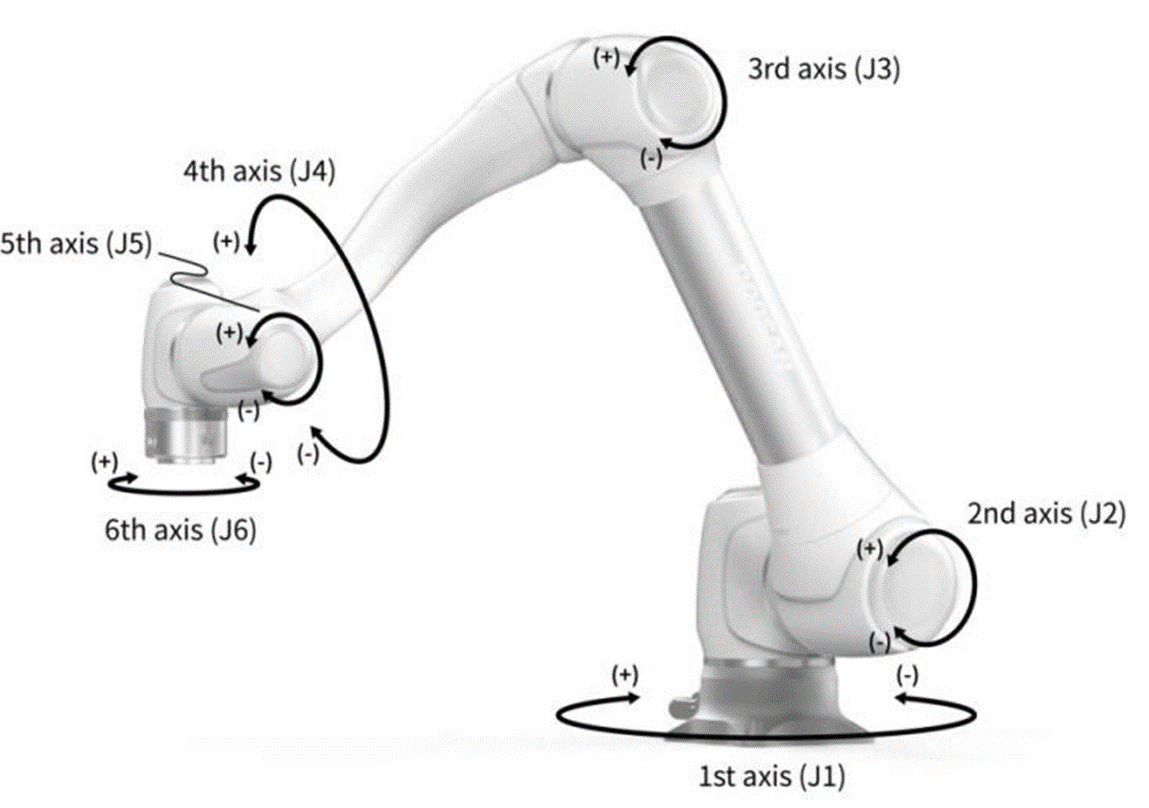
Wybrać kartę Połączenie.
Wybrać oś do przeniesienia. Można na przykład wybrać J1.
Naciśnij przycisk +/-, aby przesunąć robota. Robot porusza się po naciśnięciu przycisku +/-, a bieżąca lokalizacja jest wyświetlana na ekranie w czasie rzeczywistym.
Poniżej przedstawiono metodę przemieszczania robota za pomocą ruchu zadaniowego na ekranie uskoku:
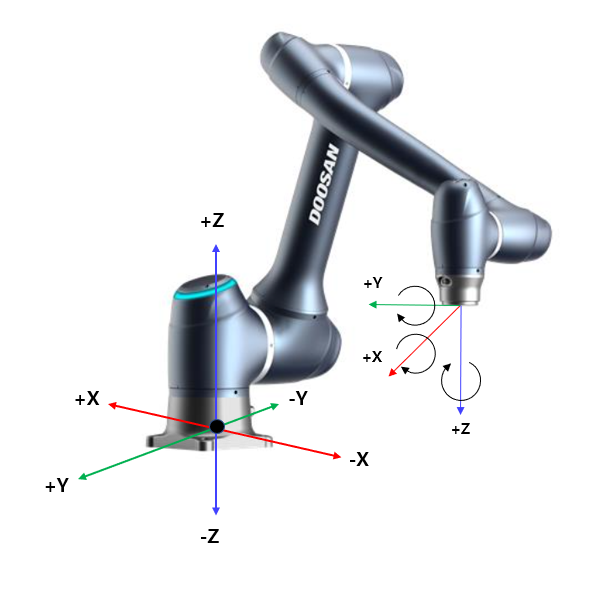
Wybierz współrzędne bazy. Robot może być przesuwany zgodnie ze współrzędnymi BAZOWYMI lub współrzędnymi NARZĘDZIA.
Wybierz kierunek, w którym chcesz się poruszać. Na przykład można wybrać oś X.
Naciśnij przycisk +/-, aby przesunąć robota. Robot porusza się po naciśnięciu przycisku +/-, a bieżąca lokalizacja jest wyświetlana na ekranie w czasie rzeczywistym.
Aby uzyskać więcej informacji na temat ruchu skokowego, przesuwania i wyrównywania, patrz Panel przesuwania Przenieś panel odpowiednio panel z uskokami i Przesuwanie panelu.
Uwaga
Jeśli przełącznik trybu rzeczywistego w lewym górnym rogu ekranu Jog jest wyłączony, robot porusza się tylko po ekranie wirtualnym po lewej stronie ekranu Jog. Rzeczywisty robot porusza się, jeśli przełącznik trybu rzeczywistego jest włączony.
Za pomocą modułu Jog Plus użytkownik może eksplorować całą przestrzeń roboczą w trybie ręcznym lub ustawić przestrzeń operacyjną jako przestrzeń operacyjną robota. Kąt ruchu każdej osi może być ograniczony w zależności od wybranej przestrzeni roboczej i granicy kąta połączenia ustawienia bezpieczeństwa.
Aby skorzystać z funkcji Jog Plus, dotknij modułu Jog Plus w menu głównym.
Funkcja Jog nie może być używana podczas Servo Off(Servo Off) .
Robot jest obsługiwany ręcznie na ekranie Jog Plus, więc robot porusza się tylko po naciśnięciu przycisku Jog.
Możliwe jest przesuwanie robota w oparciu o aktualną pozycję na ekranie zakładki Jog Plus.
Robot można przesuwać, konfigurując docelowy kąt/współrzędne na ekranie karty Przenieś.
Możliwe jest skonfigurowanie współrzędnych odniesienia na ekranie karty Jog Plus i na ekranie Przenieś jako połączenia lub zadania.
Uwaga
Jeśli nie można poruszać się po robocie z powodu umieszczenia go w innym miejscu niż obszar roboczy trybu Jog Plus, należy ustawić obszar roboczy robota na „Brak”, aby umożliwić nawigację po robocie.
Uwaga
Ten moduł nie jest dostępny w trybie automatycznym. Dotknięcie przycisku przełączania w prawym dolnym rogu powoduje, że jest on dostępny w trybie ręcznym.
Korzystanie z Job Plus (Jog+) umożliwia jednoczesne korzystanie z funkcji uskoku podczas wykonywania różnych prac. Można to wykorzystać, gdy podczas nauki wymagane jest ręczne sterowanie, aby przesunąć robota do punktu docelowego.