
Panel przesuwania
Menu
Elementy | Opis | |
|---|---|---|
| 1 | Wybierz typ panelu | Można wybrać lokalizację przycisku Przenieś. |
| 2 | Symulacja 3D. | Jest to przeglądarka 3D, gdzie można zobaczyć, jak wygląda robot. |
| 3 | Wyrównanie symulatora | Możesz użyć tej sekcji do kierowania symulatorem. |
| 4 | Użyj przyrostu | Ten przycisk umożliwia włączenie przyrostów kąta lub pozycji. |
| 5 | Przyrost kąta | W tej sekcji ustawiany jest przyrost kąta na wybranej osi. |
| 6 | Przyrost pozycji | W tej sekcji ustawiany jest przyrost pozycji na wybranej osi. |
| 7 | Kolizja | To pole służy do ustawiania kolizji robota. |
| 8 | Monitorowanie siły | W tej sekcji ustawimy siły w osiach X, Y i z na podstawie bazy, narzędzia, świata, odniesienia i między innymi. |
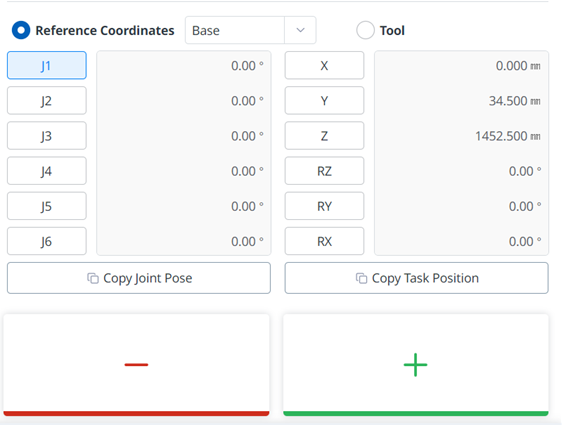
| 9 | Wybrać układ współrzędnych odniesienia | Wybierz referencyjny układ współrzędnych, który ma być użyty dla współrzędnych zadania na rysunku 11. Możesz wybrać współrzędne bazy, Świata lub użytkownika. |
| 10 | Panel przegubowy | Można wybrać oś połączenia do uskoku. |
| 11 | Panel zadań | Można wybrać oś zadania do uskoku. |
| 12 | Przycisk Kopiuj pozycję J. | Ten przycisk umożliwia kopiowanie pozycji J.. |
| 13 | Przycisk Kopiuj pozycję X. | Ten przycisk umożliwia kopiowanie pozycji X.. |
| 14 | Przycisk Przenieś - | Robot może poruszać się w kierunku - w oparciu o każdą oś. W tym czasie można określić kierunek - i + na symulacji 3D po lewej stronie. |
| 15 | Przycisk MOVE + | Robot może poruszać się w kierunku + na podstawie każdej osi. W tym czasie można określić kierunek - i + na symulacji 3D po lewej stronie. |
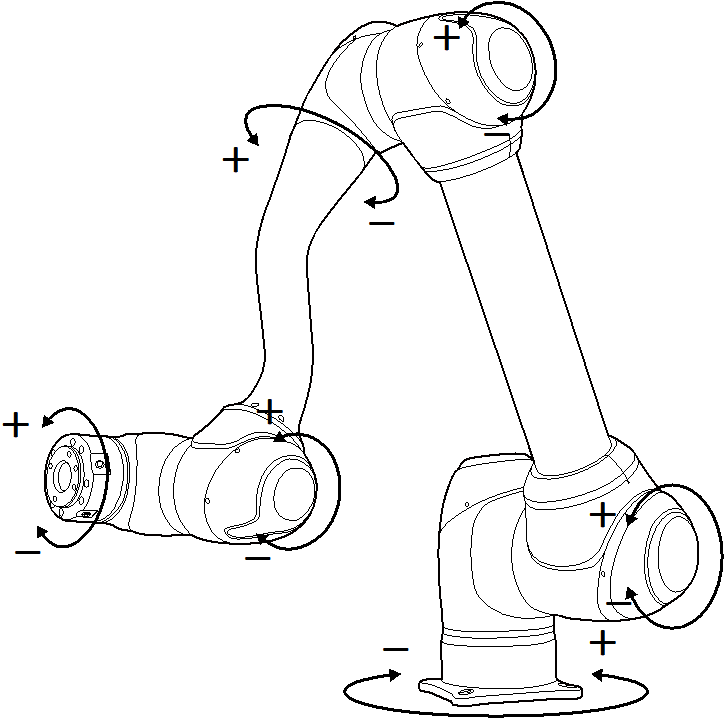
Wykonaj na podstawie połączenia robota
Aby wyregulować kąt na podstawie połączenia robota, należy wykonać następujące czynności:
Wybrać oś (J1-J6), aby wyregulować kąt na panelu przegubu.
Nacisnąć i przytrzymać przyciski kierunkowe (
 ,
,  ), aby wyregulować kąt odpowiedniej osi.
), aby wyregulować kąt odpowiedniej osi.
Wykonywanie na podstawie Robot Base

Aby przesunąć robota na podstawie jego współrzędnych bazowych, wykonaj następujące czynności:
Wybrać bazę jako referencyjny układ współrzędnych.
Na panelu zadańwybierz oś (X~RX), dla której chcesz dostosować kąt.
Nacisnąć i przytrzymać przycisk Kierunek (+,-), aby przesunąć odpowiednią oś.
Wykonywanie na podstawie współrzędnych świata

Aby przenieść robota na podstawie współrzędnych świata, wykonaj następujące czynności:
Wybierz Świat jako referencyjny układ współrzędnych.
Na panelu zadańwybierz oś (X~RX), dla której chcesz dostosować kąt.
Nacisnąć i przytrzymać przycisk Kierunek (+,-), aby przesunąć odpowiednią oś.
Wykonywanie na podstawie Robot Tool

Aby przesunąć robota na podstawie narzędzia robota, wykonaj następujące czynności:
Wybrać narzędzie jako referencyjny układ współrzędnych.
Na panelu zadańwybierz oś (X~RX), dla której chcesz dostosować kąt.
Nacisnąć i przytrzymać przycisk Kierunek (+,-), aby przesunąć odpowiednią oś.
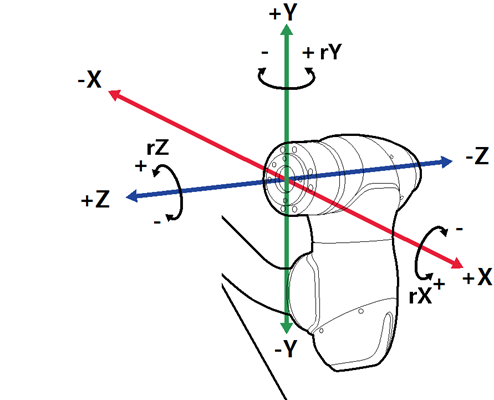
Uwaga
Strefa bezpieczeństwa nie dotyczy trybu wirtualnego.
RX, Ry i Rz są wykonywane zgodnie z TCP (pozycja środkowa narzędzia).