
Overzicht van de basisconcepten achter de opdracht taak Editor verplaatsen
VERPLICHT GEMAKKELIJK 5 MIN
Doosan Robotics robots bieden negen bewegingen. Robotbeweging wordt geregeld door standaardbewegingen, MoveJ en MoveL, en 7 bewegingen die zijn afgeleid van deze twee bewegingen.
Typen robotbeweging
| Beweging | Functie | |
|---|---|---|
| 1 | MoveJ | Elk gewricht van de robot beweegt van de huidige hoek naar de doelhoek en stopt tegelijkertijd
|
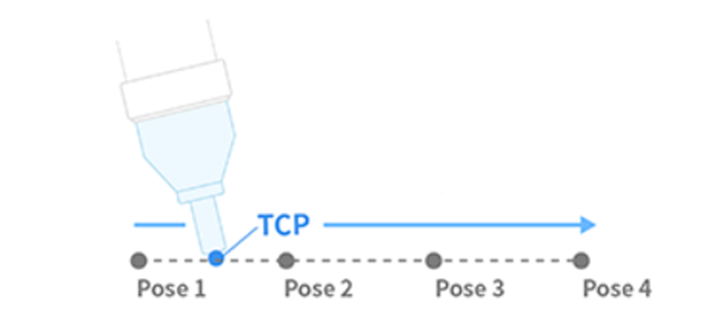
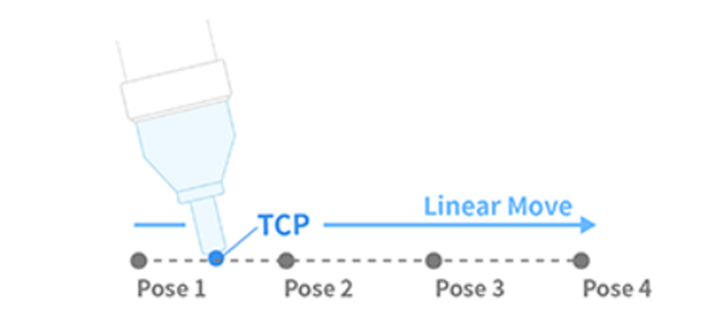
| 2 | MoveL | Robot beweegt naar het doelpunt terwijl de TCP van de robot recht blijft
|
| 3 | MoveSJ | Robot beweegt in alle hoeken die door de robot zijn ingesteld
|
| 4 | MoveSX | Robot TCP beweegt over alle punten
|
| 5 | MoveJX | De robothouding wordt aangewezen als de robot-TCP naar het doelpunt gaat
|
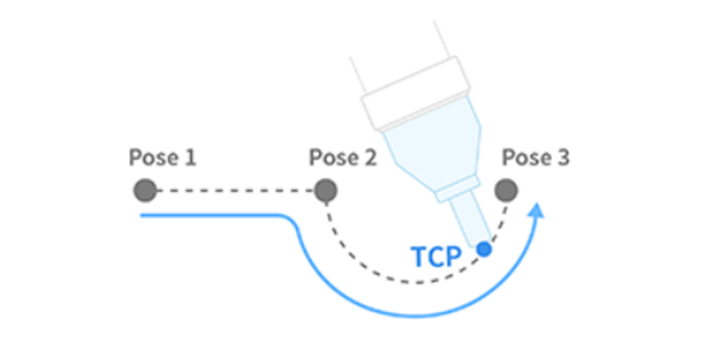
| 6 | MoveC | Robot TCP beweegt naar doelpunt terwijl een boog wordt gehandhaafd
|
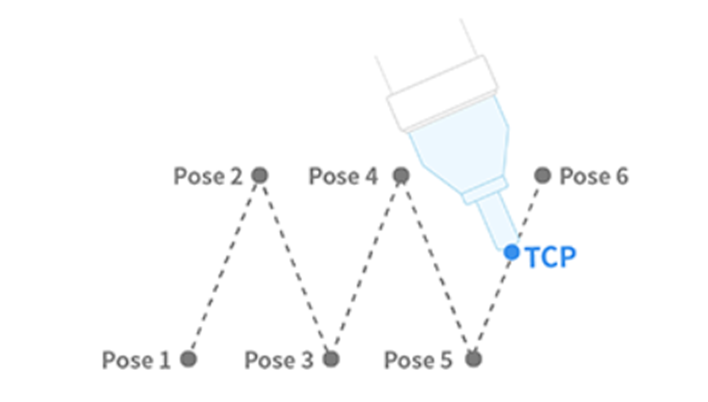
| 7 | MoveB | Robot beweegt naar het laatste doelpunt door een sectie bestaande uit continue rechte lijnen en bogen
|
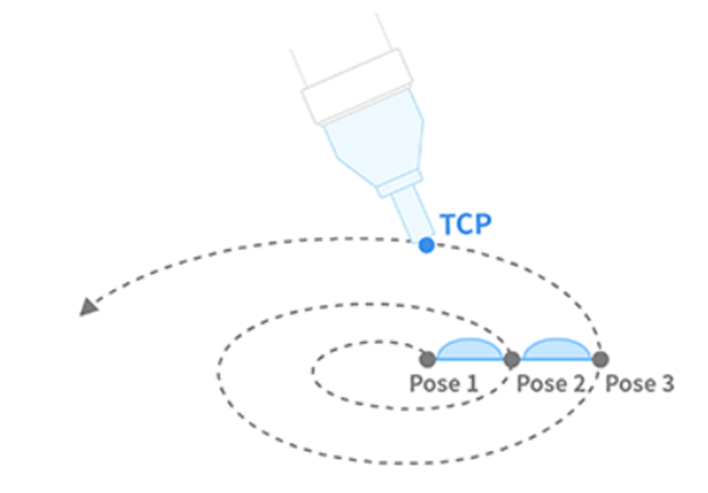
| 8 | MoveSpiral | Robot beweegt van het spiraalmiddelpunt naar de maximale radius
|
| 9 | MovePeriodic | Robot beweegt in een pad met een constante amplitude en cyclus
|
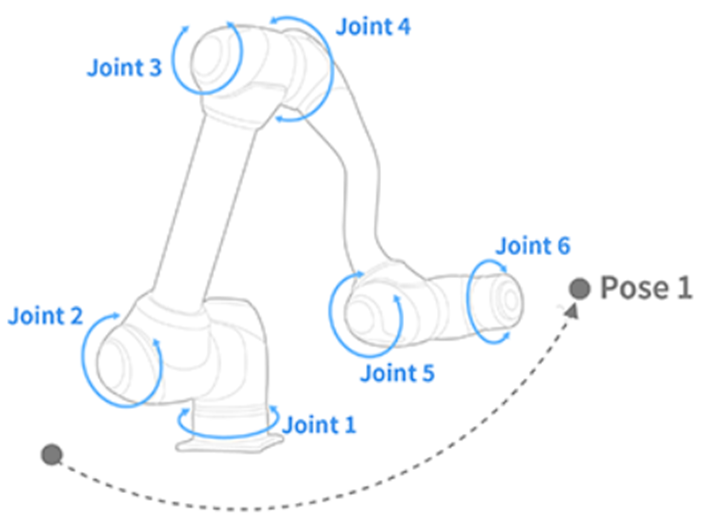

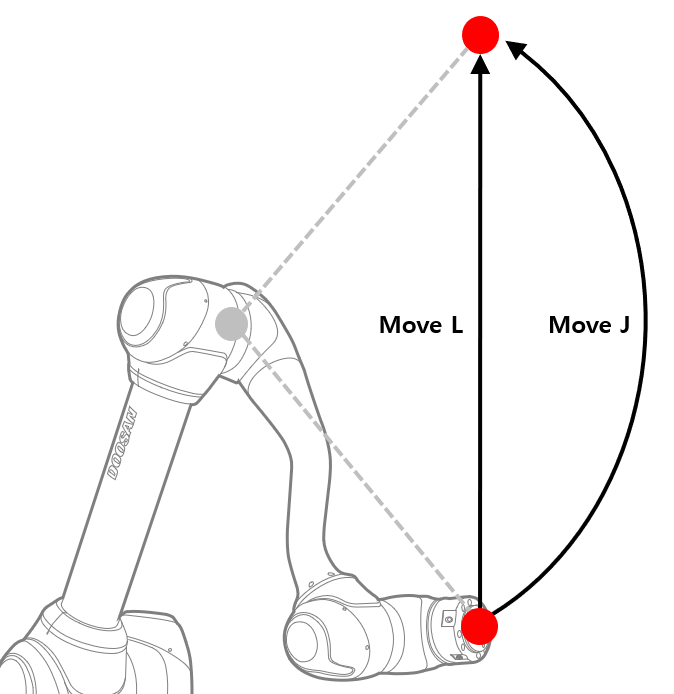
MoveJ&MoveL
Voordat robotbeweging wordt gebruikt, is het van essentieel belang dat u de standaardbewegingen MoveJ en MoveL begrijpt.
- J in MoveJ verwijst naar gewrichten. In deze beweging beweegt elk gewricht naar de doelhoek en stopt tegelijkertijd.
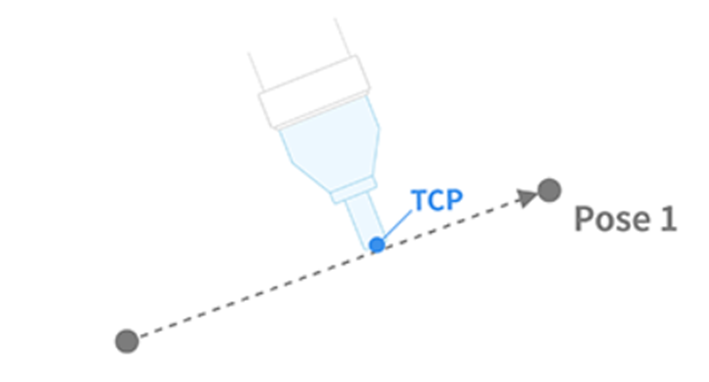
- L in MoveL verwijst naar lineair. In deze beweging beweegt de TCP aan het robotuiteinde met lineaire beweging naar de doelpositie (positie en hoek).
| Type | MoveJ | MoveL | |
|---|---|---|---|
| 1 | Verplaatsingsmethode |
|
|
| 2 | Voordeel |
|
|
| 3 | Nadeel |
|
|
| 4 | Gebruik |
|
|