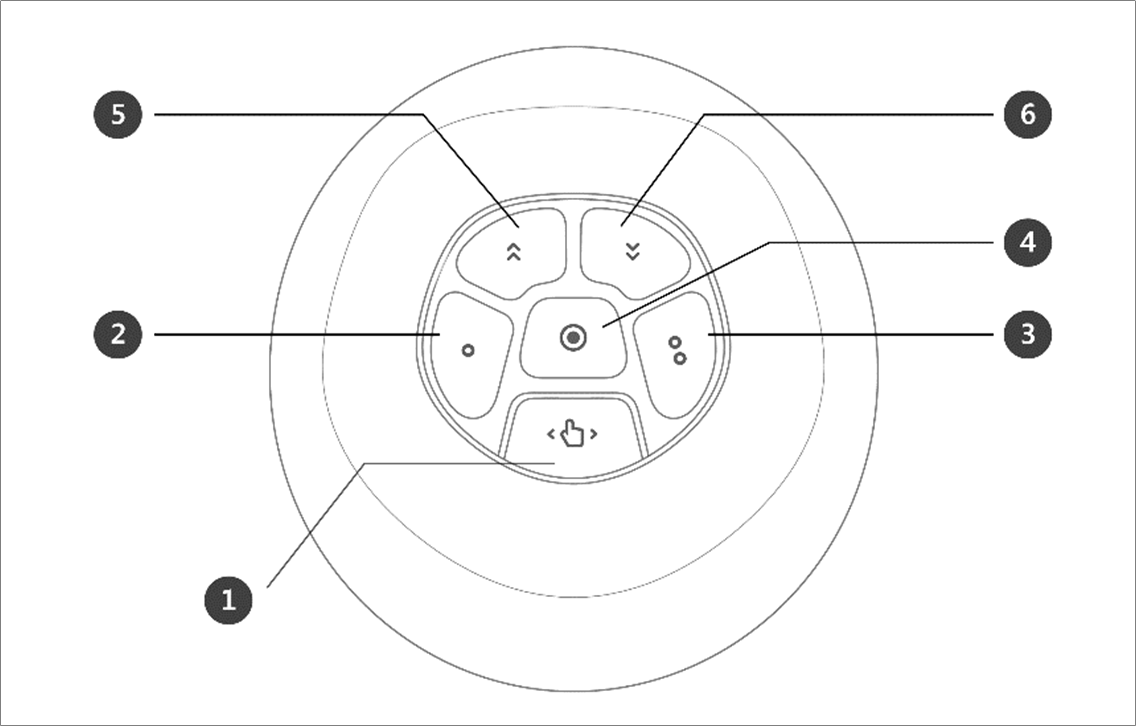
Verplaatst de focus in het scherm één regel naar boven
6
One Line Down
Verplaatst de focus in het scherm één regel naar beneden
Opmerking: Cockpit-instellingen wijzigen
Het wijzigen van de instellingen van de handgeleidingsknopen de beperkingsknop kost 0,2 seconden.
Als u op de knop Pose opslaan op het scherm voor vaardigheidsinstellingen drukt, wordt de focus automatisch verplaatst naar de volgende pose.
De knop Annuleren kan alleen worden gebruikt in het venster voor het instellen van vaardigheden dat meerdere posities beheert.
Let op
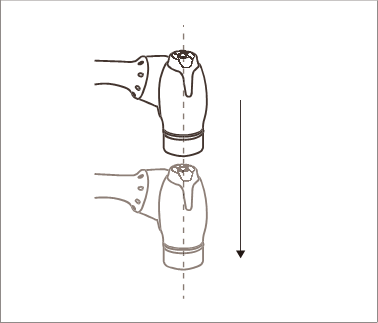
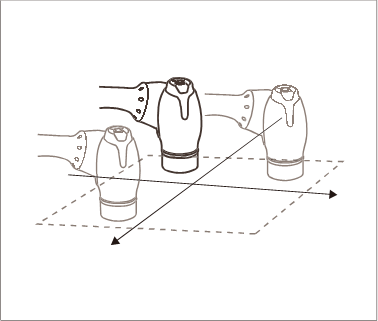
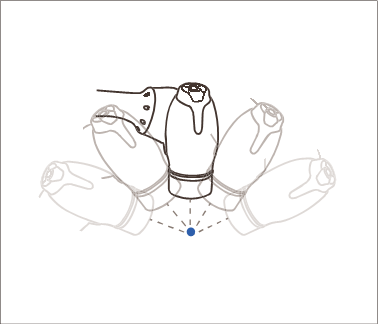
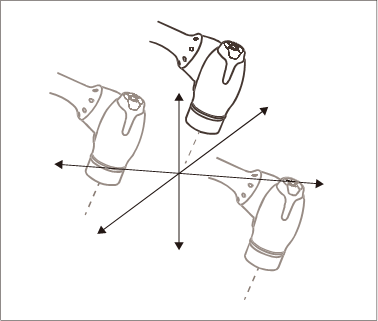
Modellen uit de A-serie met FTS (A0509S, A0912S) kunnen vaste beweging gebruiken.
Modellen uit de A-serie zonder FTS (A0509, A0912) kunnen vaste beweging niet gebruiken.
Vaste beweging vertrouwt op het aan de punt van de robot bevestigde FTS; daarom is het van essentieel belang dat het gereedschap wordt bevestigd en dat de robot het vastgrijpt terwijl hij beweegt. Bij verplaatsing van de robot terwijl de body wordt vastgehouden, kan het voorkomen dat er geen reactie van de robot wordt geactiveerd.