
Bewegen met behulp van wereldcoördinaten en referentiecoördinaten
Voer de onderstaande stappen uit om de robot te verplaatsen op basis van wereldcoördinaten:
- Selecteer het tabblad Bewegen en vervolgens het tabblad
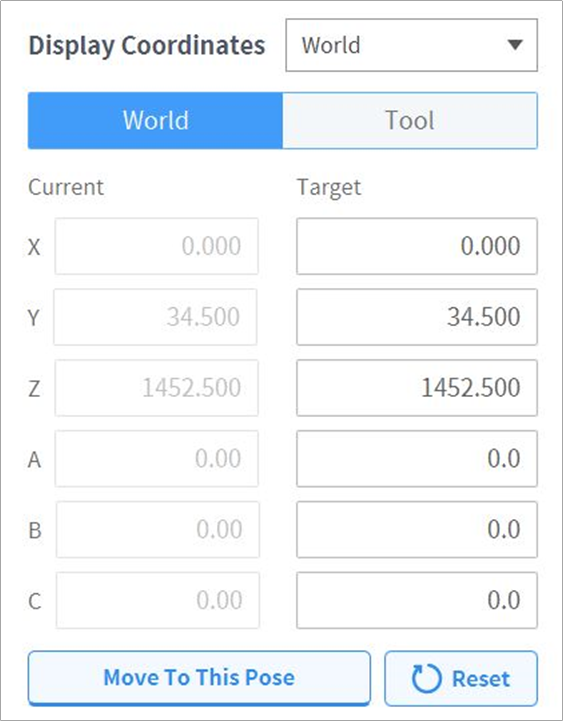
- Selecteer Wereld als de coördinaten van het display en selecteer het tabblad World.
- Configureer de pose om te bewegen met verwijzing naar de wereldcoördinaten.
- Houd de knop Bewegen naar corresponderende pose ingedrukt om naar de ingestelde coördinaat te gaan.