
Bewegingsscherm
De robot kan worden bewogen op basis van de doelhoek/coördinaten op het scherm Move. Als de coördinaten waarnaar de robot moet bewegen, bekend zijn of als de robot in tienden naar coördinaten moet worden bewogen, is het mogelijk om de robot te bewegen door coördinaten in te voeren.
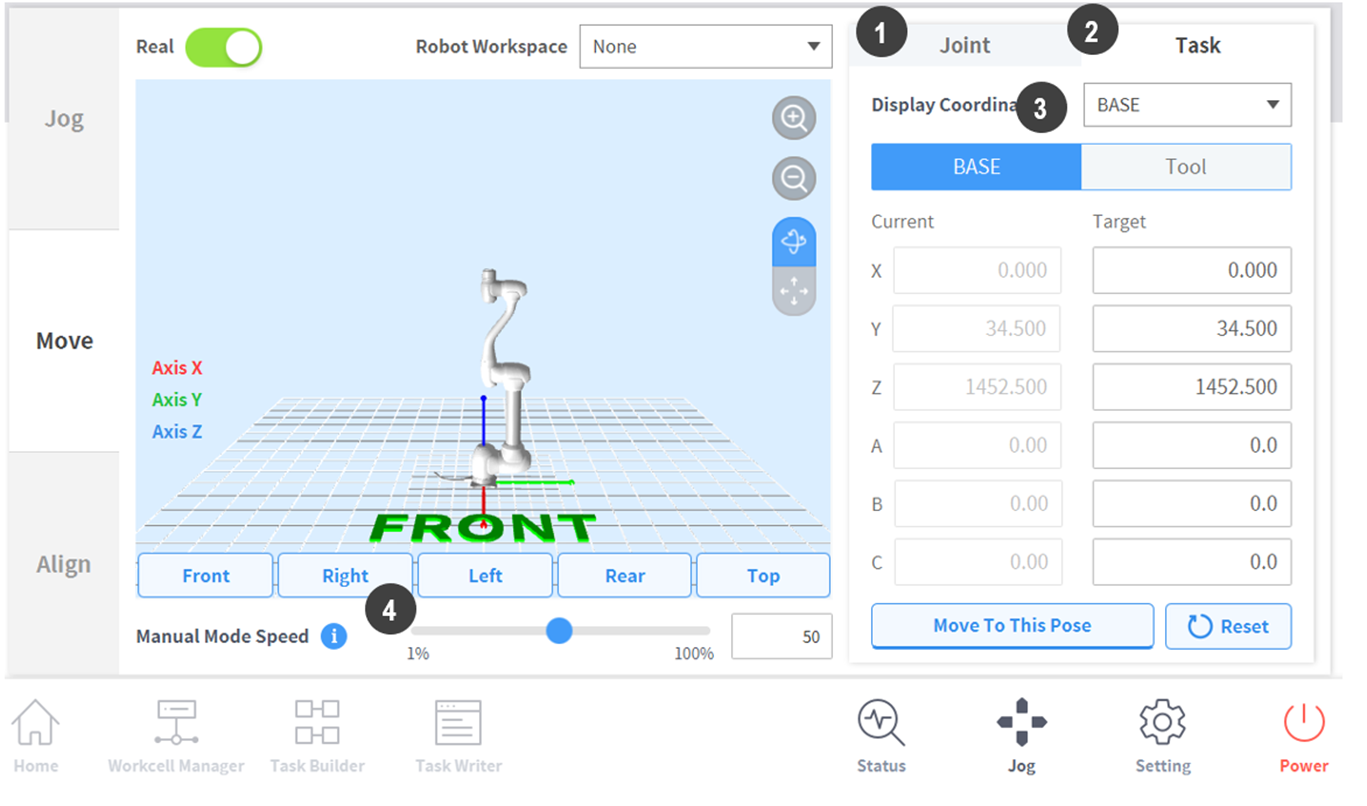
Nr. | Item | Omschrijving |
|---|---|---|
1 | Joint | Hiermee configureert u de referentiecoördinaat die u wilt gebruiken wanneer u de robot verplaatst met een jog. |
2 | Task | Hiermee configureert u de referentiehoek die u wilt gebruiken wanneer u de robot verplaatst met een jog. |
3 | Reference Point Setting | Hiermee configureert u het referentiepunt om de taakcoördinaat uit te lijnen. Basis: Hiermee configureert u de taakcoördinaat op basis van de robotbasis. World: Stelt taakcoördinaten in op basis van de ingestelde wereldcoördinaten. Tool: Hiermee configureert u de taakcoördinaat op basis van de tool die aan het einde van de zes-as van de robot is bevestigd. |
4 | Manual Mode Speed | Deze configureert de bewegingssnelheid van de robot in de handmatige modus. U kunt de snelheid aanpassen door de schuifregelaar te slepen. Als de schuifregelaar op 100% staat, is de hoogste corresponderende maximale gewrichtssnelheid op het tabblad Bewegen 30 graden/s en is de hoogste taaksnelheid 250 mm/s. De snelheid beïnvloedt de jog- en knopbedieningssnelheid. |