공간 제한(Space Limit) 설정하기
공간 제한(Space Limit) 워크셀 아이템은 로봇의 가장 외곽 영역에 가상 울타리를 설정하는 기능입니다. 공간 제한을 설정하지 않고 로봇을 운용할 수 있지만 안전한 사용을 위해 공간 제한을 설정하는 것을 권장합니다.
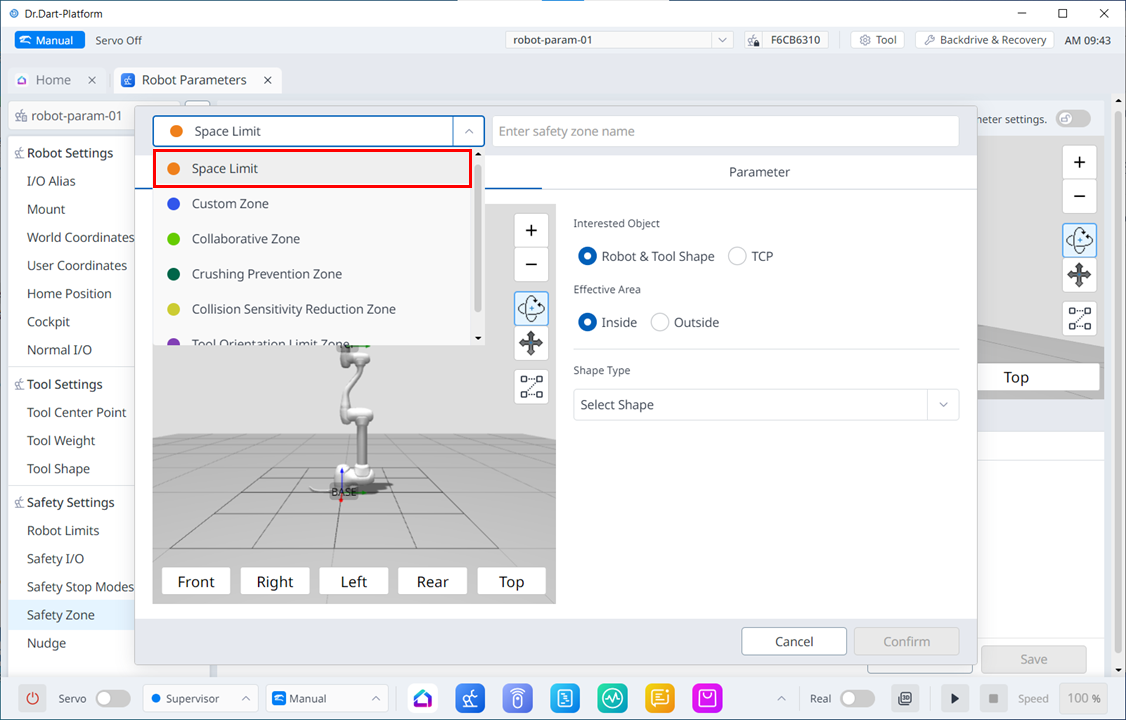
공간 제한은 Robot Parameters > Safety Settings > Safety Workspaces > Add New Workspace 에서 왼쪽 상단의 드롭다운 메뉴를 통해 들어갈 수 있으며, Shape type에서 구, 원기둥, 직육면체, 기울어진 직육면체, 다면체를 선택하여 설정할 수 있습니다.
- 검사 위치(Inspection Point)는 로봇/TCP 중 하나를 선택할 수 있으며, 유효 공간(Valid Space)을 내부/외부 중 하나를 선택할 수 있습니다.
- 모니터링 할 영역을 Robot 또는 TCP 중 선택할 수 있습니다. 내부/외부 형성된 영역의 어디를 감지할지 설정하게 됩니다.
- 기본적인 값은 전체 모니터링하고, 내부의 해당 영역이 설정하는 것을 기본으로 합니다.
- 로봇을 전부 설정한 안전 영역 안에 넣어야 정상적으로 설정됩니다.
로봇의 공간 제한(Space Limit)을 설정하려면 Safety Workspaces에서 Add New Workspace 버튼을 탭 한 후 모양 유형>직육면체, 원기둥, 다면상자, 구, 기울어진 직육면체 타입 중 하나를 선택하십시오. 설정시, 활성화시에는 Safety Password 입력이 필요합니다.