
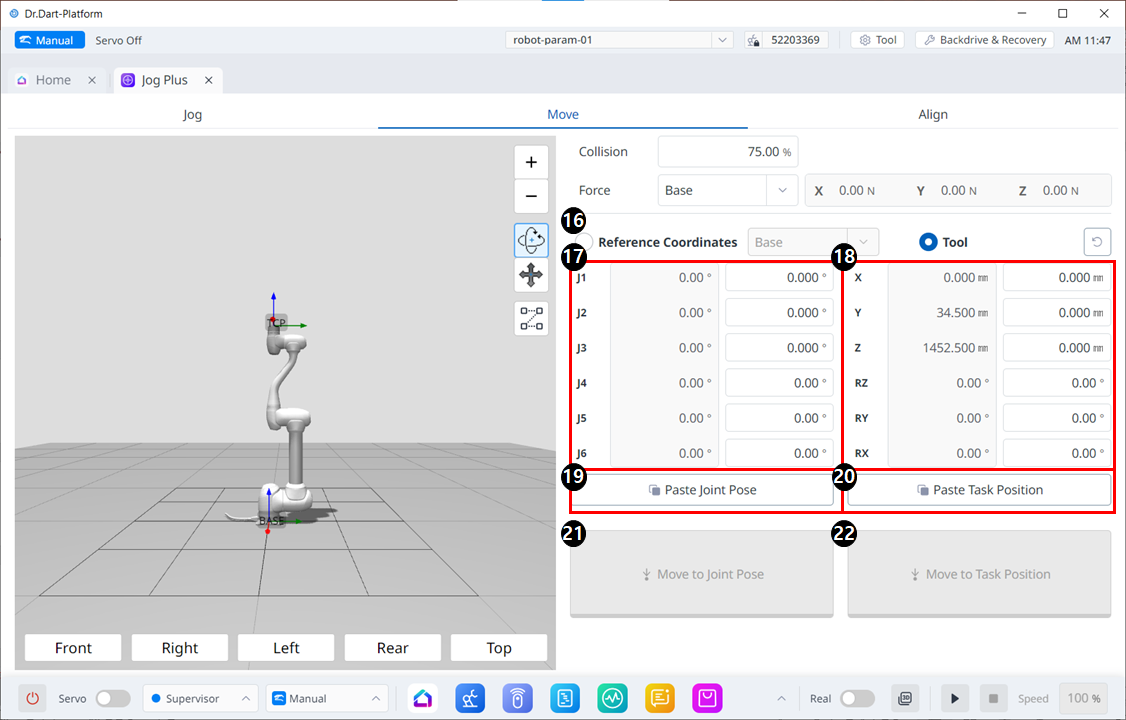
Move 화면
Move 메뉴 구성
| 항목 | 설명 | |
|---|---|---|
| 16 | 기준 좌표계 선택 | 18번 Task 좌표에 사용될 기준 좌표계를 선택합니다. Base, World, User coordinate를 선택할 수 있습니다. |
| 17 | 조인트 자세 | 현재 로봇 자세와 목표가 될 조인트 자세를 표시합니다. |
| 18 | 태스크 자세 | 선택한 기준 좌표계에 맞는 현재 로봇 자세와 목표가 될 태스크 자세를 표시합니다. |
| 19 | 조인트 자세 붙여넣기 버튼 | 클립보드에 복사 되어 있는 자세 값을 조인트 자세 패널에 붙여 넣습니다. |
| 20 | 태스크 자세 붙여넣기 버튼 | 클립보드에 복사 되어 있는 자세 값을 태스크 자세 패널에 붙여 넣습니다. |
| 21 | 조인트 모션 버튼 | 목표 Joint 자세로 이동할 수 있습니다. |
| 22 | 태스크 모션 버튼 | 목표 Task 자세로 이동할 수 있습니다. |