
Jog Plus 모듈
조그 플러스 탭에서 사용자가 원하는 수동 이동의 방식을 선택할 수 있습니다.
- 조그(Jog) : 로봇의 관절 또는 TCP를 사용자가 선택한 관절축 또는 좌표축 기준으로 이동
- 이동(Move) : 로봇의 관절 또는 TCP를 사용자가 입력한 목표위치로 이동
로봇의 이동은 크게 두 가지로 구별 됩니다.
- 조인트 모션 : 각 관절을 선형으로 회전 이동
- 태스크 모션: 목표 위치를 향해 끝 단이 선형으로 이동
조그 화면에서 조인트 모션을 사용하여 로봇을 움직이는 방법은 다음과 같습니다.
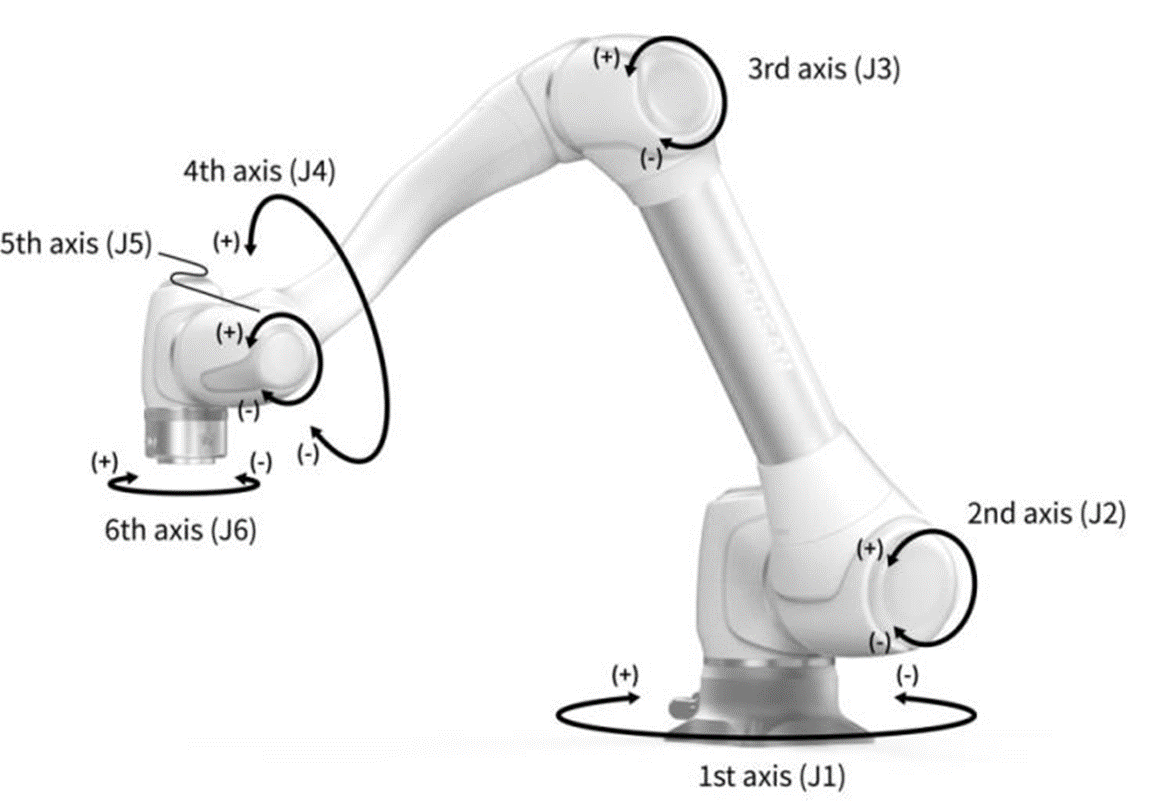
- 조인트 탭을 선택합니다.
- 움직이려는 축을 선택하십시오. 예를 들어 J1을 선택할 수 있습니다.
- +/- 버튼을 눌러서 로봇을 움직일 수 있습니다. +/- 버튼을 누르고 있는 동안 로봇이 움직이며 화면에는 현재 위치가 실시간으로 표시됩니다.
조그 화면에서 태스크 모션을 사용하여 로봇을 움직이는 방법은 다음과 같습니다.
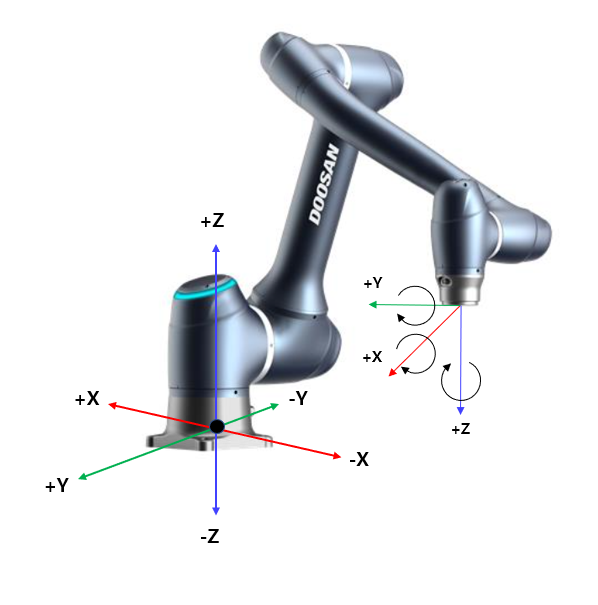
- 기준 좌표계를 선택합니다. BASE 좌표계 또는 TOOL 좌표계를 기준으로 로봇을 움직일 수 있습니다.
- 움직이려는 방향을 선택합니다. 예를 들어 X축을 선택할 수 있습니다.
- +/- 버튼을 눌러서 로봇을 움직일 수 있습니다. +/- 버튼을 누르고 있는 동안 로봇이 움직이며 화면에는 현재 위치가 실시간으로 표시됩니다.
조그 이동에 대한 자세한 설명 및 이동과 정렬에 대한 설명은 각각 Jog 화면 및 Move 화면을 참조하십시오.
알아두기
- 조그 화면 좌측 상단의 실제 모드 토글 스위치를 끄면 조그 화면 좌측의 가상 화면에서만 로봇이 움직이게 됩니다. 실제 모드 토글 스위치를 켜면 실제 로봇이 움직이게 됩니다.
조그 플러스(Jog Plus) 모듈에서는 수동 모드로 전체 작업 공간을 탐색(exploring)하거나 사용자가 설정한 작동 공간(Operation Space)을 로봇 작업 공간으로 선택하여 탐색할 수 있습니다. 각 축의 이동 각도는 로봇의 사양, 조그 화면에서 선택한 작동 공간, 설정 화면의 안전 설정 중 조인트 각도 제한치에 따라 제한될 수 있습니다.
조그 플러스 기능을 사용하려면 주 메뉴에서 조그 플러스 모듈을 탭 하십시오.
- 서보 오프(Servo Off) 상태에서는 조그 기능을 사용할 수 없습니다.
- 조그 플러스 화면에서 로봇은 수동 모드로 작동하므로 조그 버튼을 누르고 있는 동안만 로봇이 이동합니다
- 조그 플러스 탭 화면에서는 현재 위치를 기준으로 로봇을 이동할 수 있습니다.
- Move 탭 화면에서는 목표 각도/좌표를 설정하여 로봇을 이동할 수 있습니다.
- 조그 플러스 탭 화면과 이동 탭 화면에서는 기준 좌표를 조인트 혹은 태스크로 설정할 수 있습니다.
알아두기
- 조그 플러스 모드의 로봇 작업 공간에서 선택한 작동 공간을 벗어난 영역에 로봇이 위치하여 탐색이 불가한 경우 로봇 작업 공간을 “None”으로 변경하면 탐색할 수 있습니다.
알아두기
Auto 모드에서는 이 모듈을 사용할 수 없습니다. 오른쪽 하단의 토글 버튼을 탭하여 Manual 모드에서 사용할 수 있습니다.
조그 플러스(Jog+)를 사용하면 다른 작업을 하면서 동시에 조그 기능을 사용할 수 있습니다. 로봇의 티칭시에 목표점까지 미세한 수동 이동 조종이 필요한 경우에 활용할 수 있습니다.
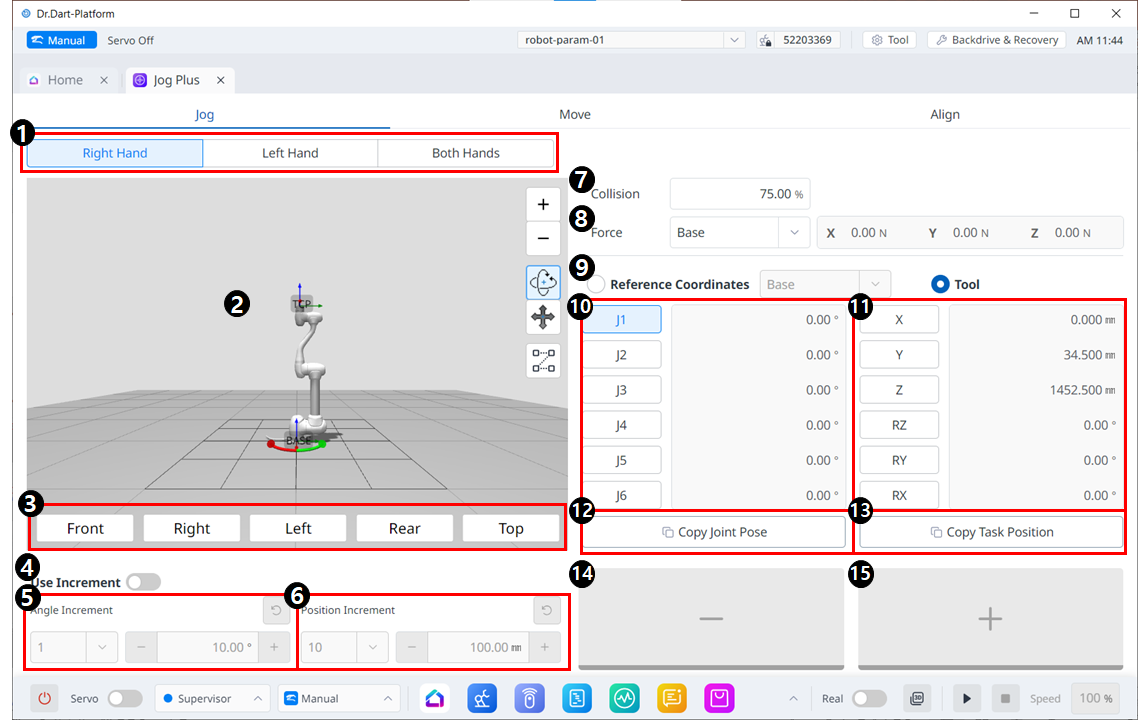
Jog 메뉴 구성
| 항목 | 설명 | |
|---|---|---|
| 1 | 패널 타입 선택 | 동작 버튼의 위치를 선택 할 수 있습니다. |
| 2 | 3D simulation | 3D 뷰어에서 로봇의 모습을 보여줍니다. |
| 3 | Simulator Alignment | 시뮬레이터의 정렬 방법 항목입니다. |
| 4 | Use Increment | 각도 혹은 위치 increment의 활성화 버튼입니다. |
| 5 | Angle Increment | 선택한 축에서의 각도 Increment를 설정할 수 있습니다. |
| 6 | Position Increment | 선택한 축에서의 위치 Increment를 설정할 수 있습니다. |
| 7 | Collision | 로봇 충돌을 설정할 수 있습니다. |
| 8 | Force Monitoring | Base, Tool, World, Reference 등을 기준으로 X, Y, Z축의 힘을 설정할 수 있습니다. |
| 9 | 기준 좌표계 선택 | 11번의 Task 좌표를 표시하거나 jog할 기준 좌표계를 선택합니다. Base, World, User coordinate를 선택할 수 있습니다. |
| 10 | 조인트 패널 | Jog할 Joint축을 선택할 수 있습니다. |
| 11 | 태스크 패널 | Jog할 Task 축을 선택할 수 있습니다. |
| 12 | Copy Pose J button | Pose J를 복사합니다. |
| 13 | Copy Pose X button | Pose X를 복사합니다. |
| 14 | Move - Button | 각 축을 기준으로 하여 - 방향으로 움직입니다. 이때 왼쪽의 3D simulation에서 -와 +의 방향을 파악할 수 있습니다. |
| 15 | Move + Button | 각 축을 기준으로 하여 + 방향으로 움직입니다. 이때 왼쪽의 3D simulation에서 -와 +의 방향을 파악할 수 있습니다. |
Move
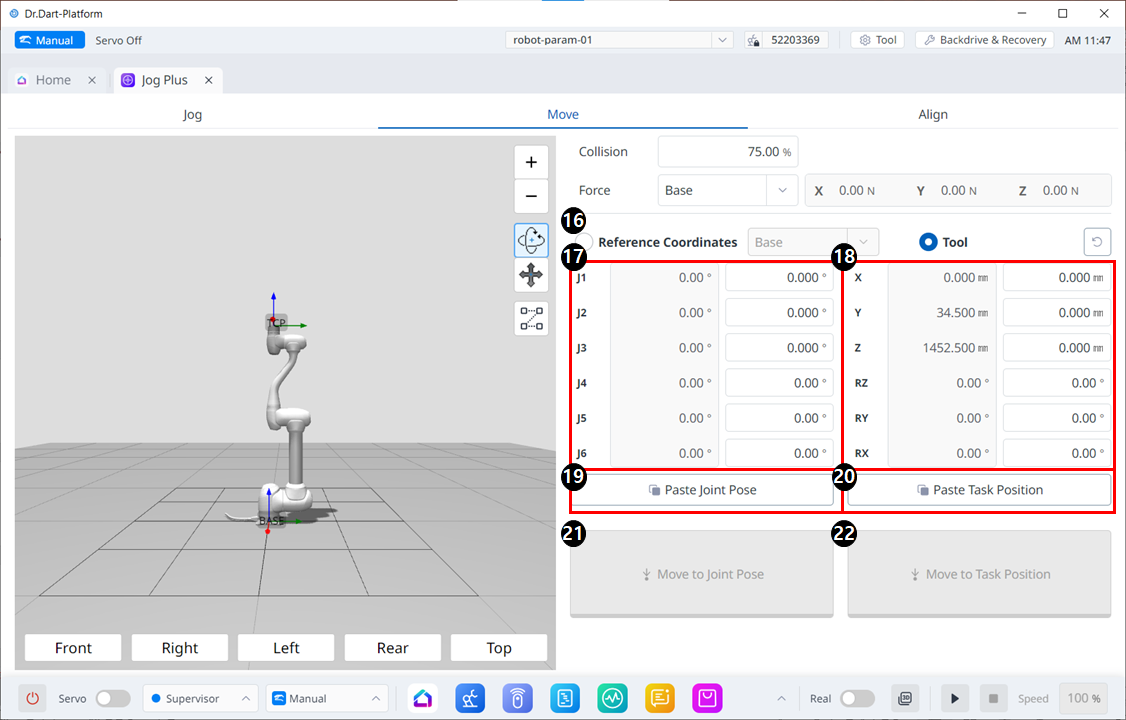
Move 메뉴 구성
| 항목 | 설명 | |
|---|---|---|
| 16 | 기준 좌표계 선택 | 18번 Task 좌표에 사용될 기준 좌표계를 선택합니다. Base, World, User coordinate를 선택할 수 있습니다. |
| 17 | 조인트 자세 | 현재 로봇 자세와 목표가 될 조인트 자세를 표시합니다. |
| 18 | 태스크 자세 | 선택한 기준 좌표계에 맞는 현재 로봇 자세와 목표가 될 태스크 자세를 표시합니다. |
| 19 | 조인트 자세 붙여넣기 버튼 | 클립보드에 복사 되어 있는 자세 값을 조인트 자세 패널에 붙여 넣습니다. |
| 20 | 태스크 자세 붙여넣기 버튼 | 클립보드에 복사 되어 있는 자세 값을 태스크 자세 패널에 붙여 넣습니다. |
| 21 | 조인트 모션 버튼 | 목표 Joint 자세로 이동할 수 있습니다. |
| 22 | 태스크 모션 버튼 | 목표 Task 자세로 이동할 수 있습니다. |