
공구중심점(TCP) 설정
공구중심점(TCP)를 설정할 때에 플랜지 좌표계를 기준으로 위치와 함께 회전각을 함께 정의해야 합니다. 이때, 플랜지좌표계 기준 원점에서 공구중심점(TCP)까지 X, Y, Z 각 방향 별 거리가 10000mm 이상이 되도록 공구중심점(TCP)를 설정할 수 없습니다. 그리고, X, Y, Z의 환산 길이(
자동 계산을 통해서 공구중심점(TCP)을 설정하는 경우 X, Y, Z 위치만 자동 계산되므로 회전각은 사용자가 입력해야 합니다. 회전각은 A, B, C의 세 가지 항목으로 지정할 수 있으며 이는 ‘오일러 Z-Y-Z (Euler Z-Y-Z angles)’ 회전 방법을 따릅니다.
아래 그림에서 소문자 x, y, z로 표현되는 좌표축과 대문자 X, Y, Z로 표현되는 좌표축의 정의는 다음과 같습니다.
- ‘플랜지 좌표계’의 좌표축(x, y, z): 플랜지 끝단에 정의되는 ‘플랜지 좌표계’의 좌표축의 방향은 로봇의 조인트 각도가 (0,0,0,0,0,0)일 때 로봇 좌표계와 동일합니다.
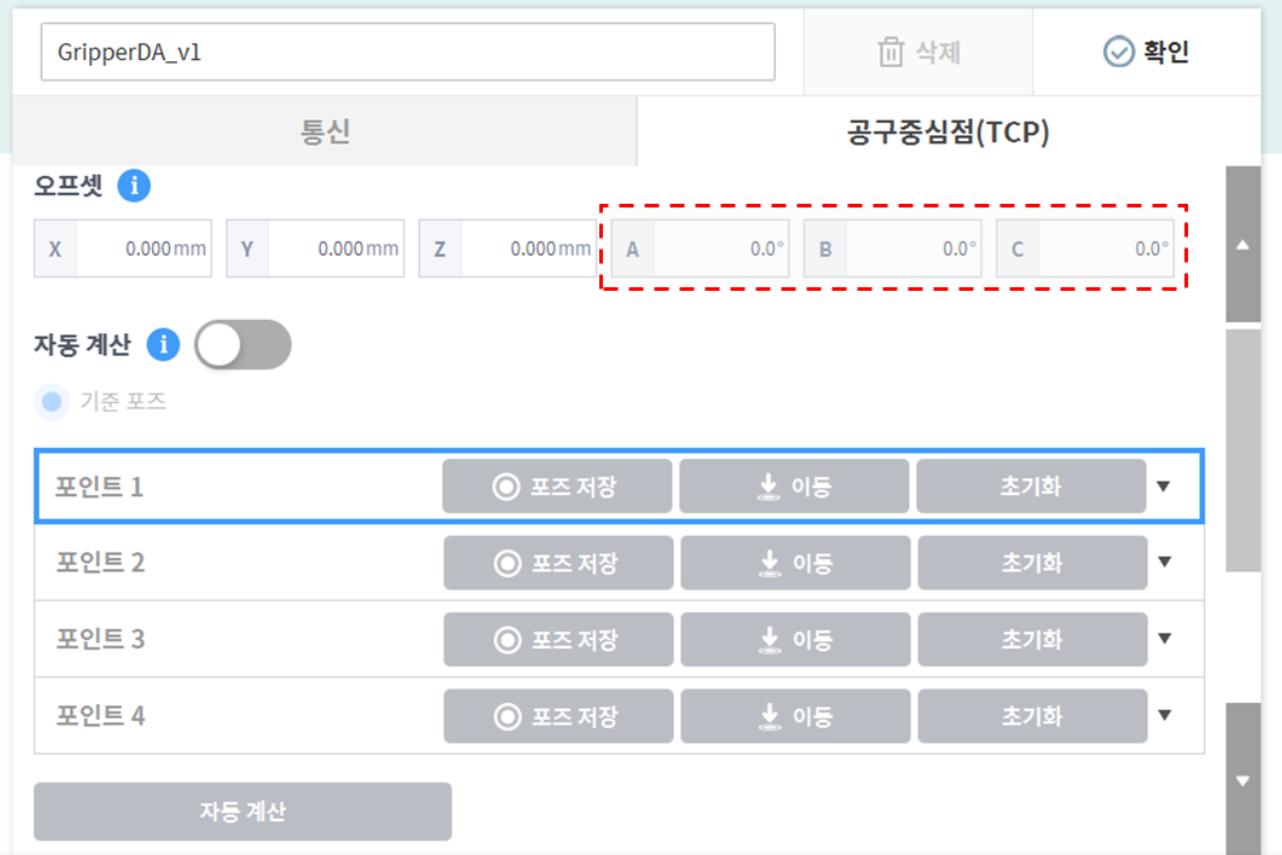
- ‘TCP 좌표계’의 좌표축 (X, Y, Z): 플랜지 끝단에 장착하는 툴의 끝단 또는 작용점(Working Point)에 설정합니다. 이 때 ‘플랜지 좌표계’를 기준으로 ‘TCP 좌표계’의 회전각은 아래 1)~3)의 순서를 따라 정의됩니다.
1) 플랜지 좌표계의 z축을 따라 A각도 회전
2) 1)을 통해 회전된 좌표계의 y’축을 따라 B각도 회전
3) 2)를 통해 회전된 좌표계의 z’’축을 따라 C각도 회전
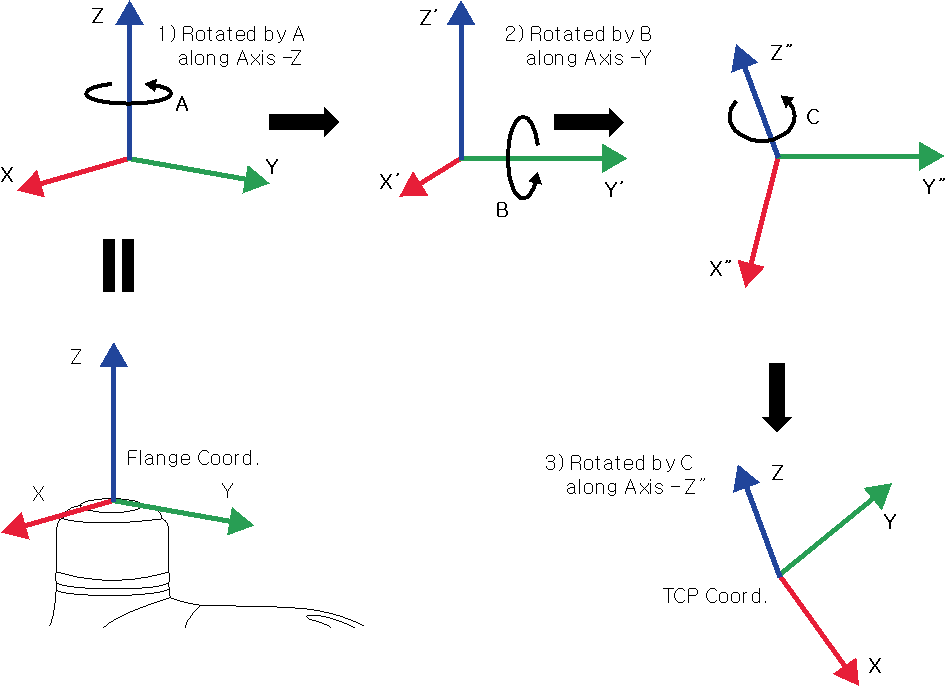
위의 방법을 따라 TCP 값을 설정하는 몇 가지 예를 들어보겠습니다.
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Z방향 옵셋만 있는 일반적인 그리퍼 (TCP Coord)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: 45도 각도를 가진 좌측 그리퍼 (TCP Coord. L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: 45도 각도를 가진 우측 그리퍼 (TCP Coord. R)