
시스템 복원
로봇 시스템을 사용자가 선택한 특정 버전으로 복원시킵니다.
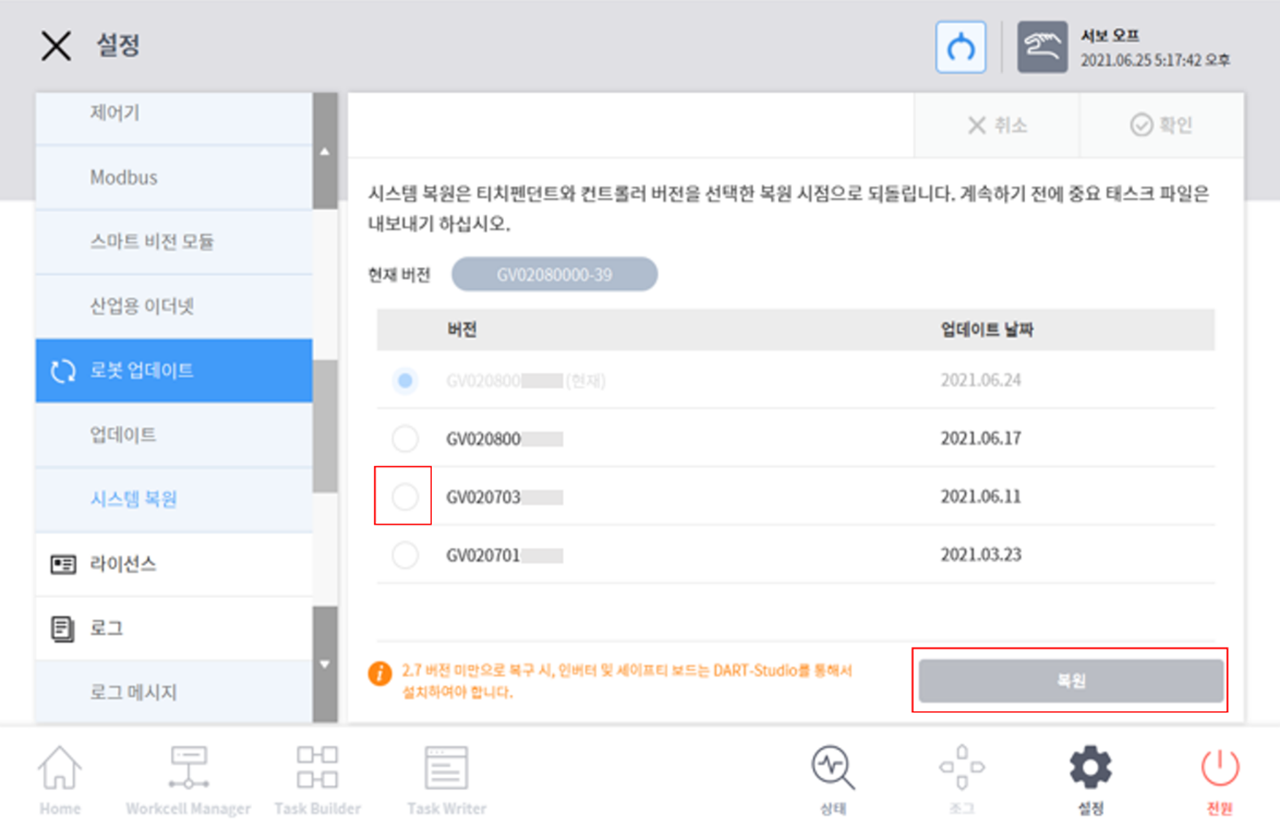
- 설정 메뉴 영역에서 로봇 업데이트>시스템 복원 메뉴를 선택하십시오.
- 로봇 시스템에 설치되었던 최근 5개 버전까지 화면에 나타납니다.
- 현재 버전의 라디오 버튼이 선택된 상태로 표시됩니다.
- 복원하고자 하는 버전의 라디오 버튼을 선택하십시오.
- 복원 버튼이 활성화됩니다.
- 복원 버튼을 누르십시오.
- 복원이 완료되면 시스템을 다시 시작해 주십시오.
알아두기
Windows 로 접속한 경우에는 시스템 복원 기능이 제공되지 않습니다.
Version : A Series
- A 시리즈에서 시스템 복원 이후 다음과 같은 문제가 발생하는 경우에는 “마찰 캘리브레이션(Friction Calibration)(A-Series)“을 참고하여, 마찰 캘리브레이션을 수행해야 합니다.
- 직접 교시의 조작이 어려워지는 문제 발생하는 경우
- Tool의 무게 및 무게중심을 정확하게 설정하였음에도 직접교시가 정상적으로 동작하지 않는 경우
- 직접교시를 시도했을 때 로봇이 빠르게 흐르거나 도와주는 힘이 과도한 경우
- 직접교시를 시도했을 때 한쪽 방향으로 조작이 어려운 경우
- Default 충돌 민감도 설정 상태에서 충돌감지가 빈번하게 발생하는 경우
- 간헐적으로 티치 펜던트에서 '2.9015' 에러가 발생하는 경우
- 9015 에러: 로봇끝단의 외력이 안전범위를 초과하였습니다.