
실제 모드 화면: 엔드이펙터 정보 탭
태스크 빌더의 실제 모드 플레이 화면의 엔드이펙터 정보 탭은 아래와 같이 구성되어 있습니다.
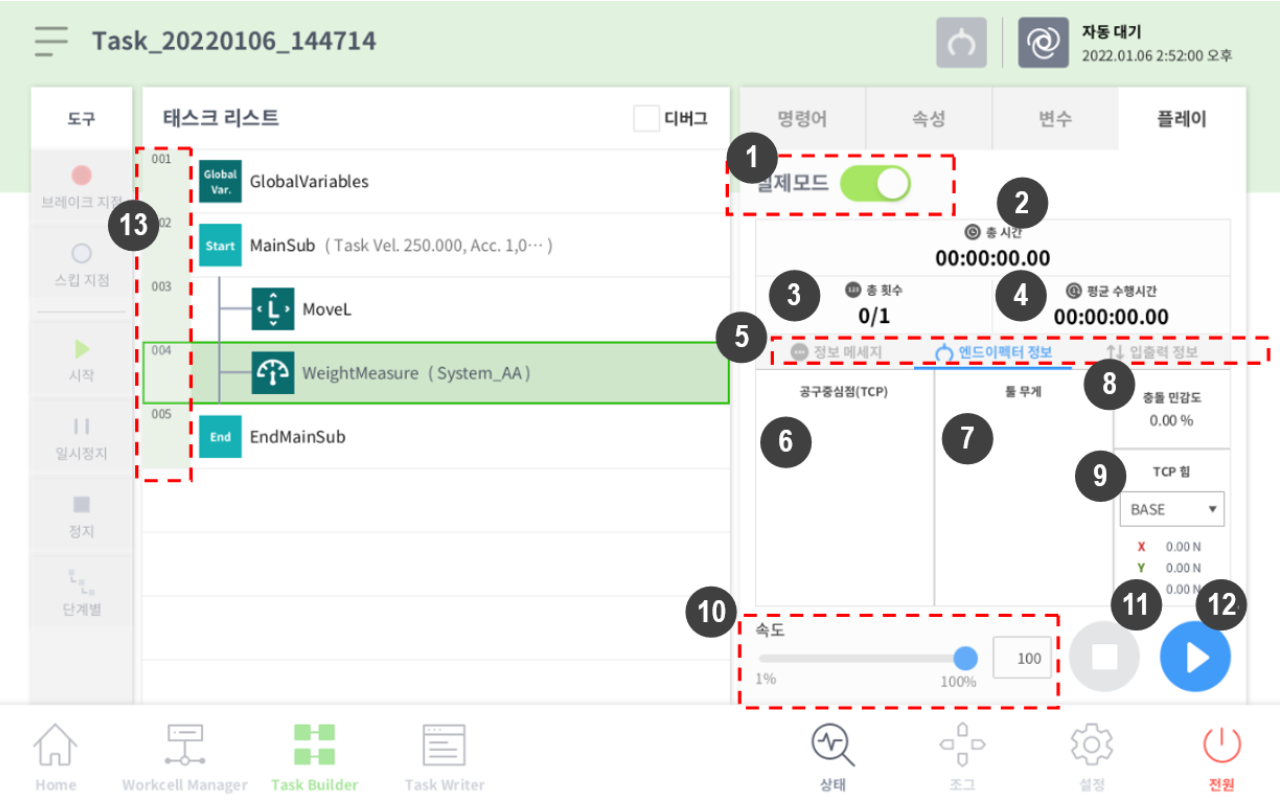
번호 | 항목 | 설명 |
1 | 실제 모드( | 로봇 테스트 플레이 모드를 전환합니다.
|
2 | 총 시간 | 태스크 실행 후 경과한 총 시간을 표시합니다. |
3 | 총 횟수 | 태스크가 실행된 횟수를 표시합니다. |
4 | 평균 수행 시간 | 태스크 리스트의 작업을 1회 수행할 때 소요되는 평균 시간을 표시합니다. |
5 | 정보 화면 전환 탭 | 로봇의 정보 메시지 화면, 엔드 이펙터 정보 화면과 입출력 정보 화면을 전환할 수 있습니다.
|
6 | 툴 중심 위치 정보 영역 | Set TCP 명령어 혹은 조그의 툴 중심 위치 및 무게 설정 기능을 통해 설정된 툴 중심 위치 정보를 표시합니다. |
7 | 툴 무게 정보 영역 | Set TCP 명령어 혹은 조그의 툴 중심 위치 및 무게 설정 기능을 통해 설정된 툴 무게 정보를 표시합니다. |
8 | 충돌 정보 영역 | 현재 로봇이 진입한 작업 공간에 설정된 충돌 민감도 값을 표시합니다. |
9 | 힘 정보 영역 | Base, World, User, Reference 좌표계에 발생하는 힘 정보를 표시합니다. Reference 좌표계는 로봇에 설정된 좌표계 정보를 기준으로 힘 정보를 표시합니다. |
10 | 속도 슬라이더 | 실제 혹은 가상 모드에서 로봇의 속도를 설정할 수 있습니다. |
11 | 정지 버튼 | 실행 중인 태스크를 정지합니다. |
12 | 재생/일시정지 토글 버튼 | 태스크 리스트의 작업을 재생 혹은 일시 정지할 수 있습니다. |
13 | 소요시간 | 해당 명령어/스킬을 수행할 때 소요된 시간을 표시합니다. |

주의
- 실제 모드에서 태스크를 실행하기 전 가상 모드에서 태스크를 실행하여 사용자가 의도한 대로 작동하는지 확인하십시오.
- 다른 기계의 작업 영역 외부에서 임시 웨이포인트를 지정하여 로봇 프로그램을 시험할 것을 권장합니다. 두산로보틱스는 프로그래밍 오류 또는 로봇 장애에 따른 로봇 및 다른 장비 손상에 대해 책임지지 않습니다.
- 티치 펜던트에 비상 정지 버튼이 있습니다. 비상 시에는 비상 정지 버튼을 눌러 로봇을 정지하십시오.
FTS(Force Toque Sensor)가 없는 모델인 경우 힘(X, Y, Z)의 값은 모니터링 되지 않습니다.