
목표물 기준으로 정렬하기
작업물 교시를 위해 작업물의 특정 축 방향에 TCP를 정렬할 경우 유용한 기능입니다. 자세를 고정한 후 교시하려면 콕피트 버튼을 이용한 면 또는 선 고정 직접 교시 기능을 이용해 보십시오.
로봇의 TCP를 목표물을 기준으로 정렬하려면:
정렬 탭을 선택한 후 목표물에 정렬하기 탭을 선택하십시오.
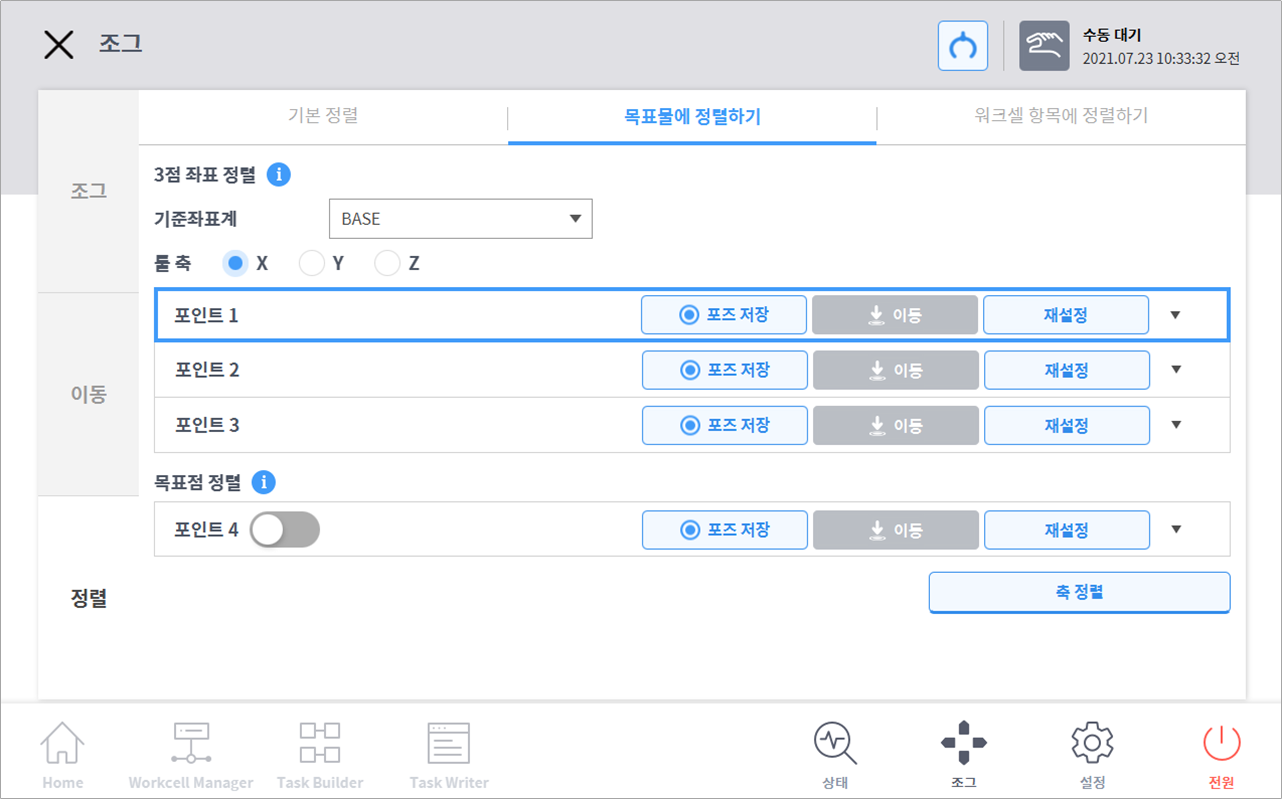
정렬하고자 하는 기준좌표계를 선택하십시오.

정렬하려는 툴의 축을 선택하십시오.
- 로봇을 원하는 위치로 이동한 후 포인트 1을 탭 하십시오.
- 포인트 1의 포즈 저장 버튼을 탭 하십시오.
포인트 2, 포인트 3도 같은 방법으로 설정합니다. 설정이 완료되면 3점을 기준으로 가상의 벡터 영역이 설정됩니다.

- (선택 사항) TCP의 방향과 함께 위치도 지정하려면, 포인트4의 토글 버튼을 탭 한 다음 로봇을 원하는 위치로 이동한 후 포즈 저장 버튼을 탭 하십시오.
- 축 정렬 버튼을 길게 탭 해 축을 정렬하십시오.
- 목표물을 기준으로 z축 방향 150 mm 위에 6축 헤드를 위치시킵니다.