순응(Compliance) 명령어 예제 따라하기
OPTIONAL NORMAL 20 MIN
이 예제는 태스크 라이터(Task Writer)에서 작성되었습니다. 태스크 빌더(Task Builder)에서도 거의 동일한 방법으로 이 예제를 따라할 수 있습니다.
주의
예제를 시작하기 전에 반드시 (2.12-ko_KR) 사용 시 주의사항 을 확인하십시오. 자세한 내용은 (2.12-ko_KR) PART 1. 안전 매뉴얼 을 참조하십시오.
알아두기
순응 제어를 켜거나 끌 때 임계값(Threshold of JTS error) 이상의 외부 토크가 있으면 로봇은 JTS(Joint Torque Sensor) 오류로 프로그램을 정지합니다.
Threshold of JTS error (Nm)
Model
J1
J2
J3
J4
J5
J6
E0509
15
15
15
15
15
15
강성(stiffness) 변경(Change)은 외부 토크의 크기와 관계없이 실행 할 수 있습니다.
순응 제어 중에는 MoveJ 명령어와 같은 조인트 모션을 수행할 수 없습니다.
강성(Stiffness) 설정 범위 : Translation(0~10000N/m)
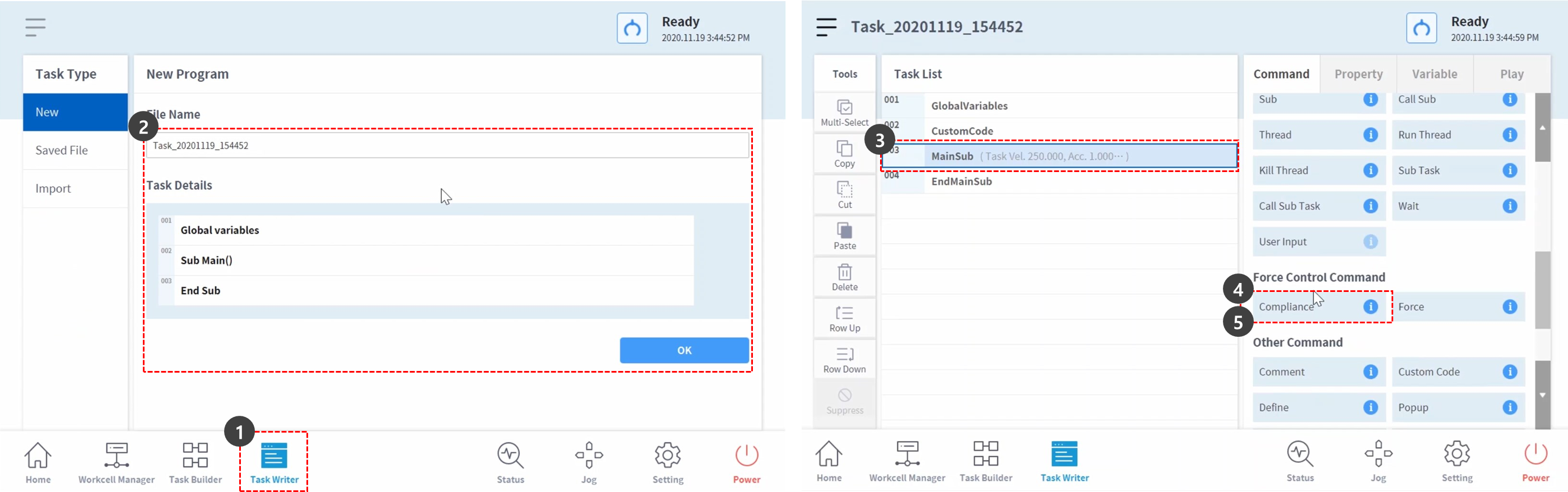
하단 메뉴에서 태스크 라이터(Task Writer)를 선택하십시오.
태스크 이름을 지정하고 확인(OK) 버튼을 누르십시오.
태스크 리스트에서 3번 줄의 MainSub 명령어를 선택하십시오. 선택한 줄의 다음 줄에 새로운 명령어가 추가됩니다.
Compliance 명령어를 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 활성화하는데 사용될 예정입니다.
Compliance 명령어를 한 개 더 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 비활성화하는데 사용될 예정입니다.
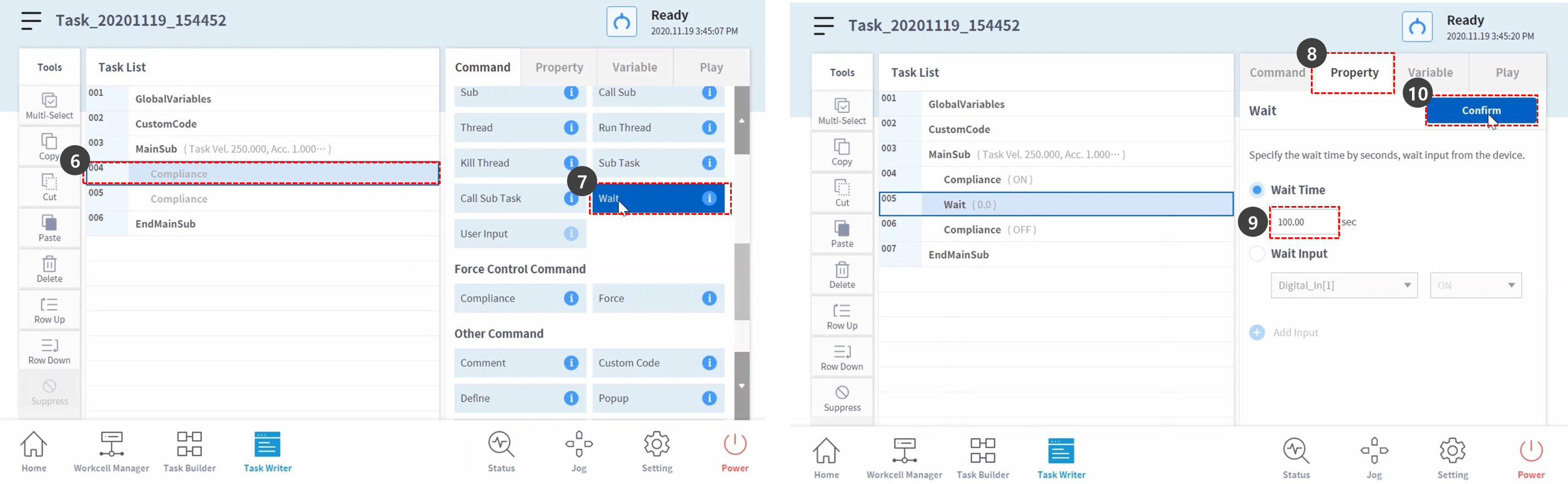
4번 줄의 Compliance 명령어를 선택하십시오. 선택한 줄의 다음 줄에 새로운 명령어가 추가됩니다.
Wait 명령어를 추가하십시오.
속성(Property) 탭을 선택하십시오.
Wait Time을 다음과 같이 설정합니다.
Wait Time : 100 sec
확인(Confirm) 버튼을 누르십시오.
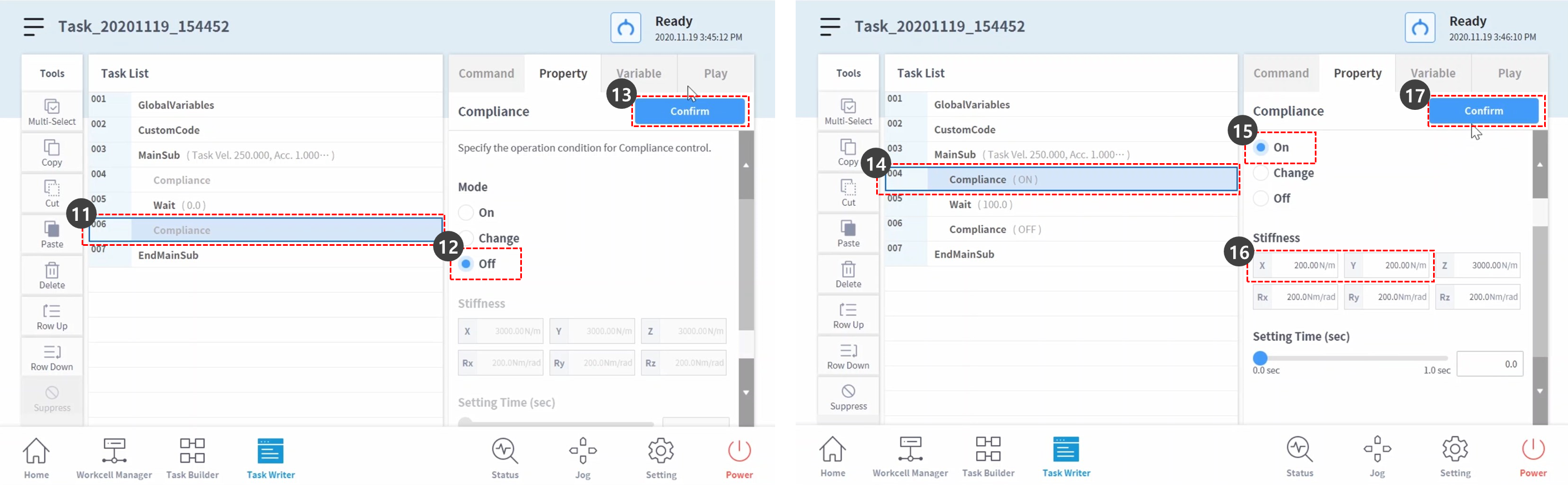
6번 줄의 Compliance 명령어를 선택하십시오.
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode Off는 순응 제어를 비활성화 합니다.
Mode : Off
확인(Confirm) 버튼을 누르십시오.
4번 줄의 Compliance 명령어를 선택하십시오.
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode On은 순응 제어를 활성화 합니다.
Mode : On
강성(Stiffness)를 다음과 같이 설정합니다. X, Y 방향의 강성을 낮추어 X, Y 방향으로 조금 더 물렁하게 반응하도록 하겠습니다.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (default)
Rx, Ry, Rz : 200 Nm/rad (default)
확인(Confirm) 버튼을 누르십시오.
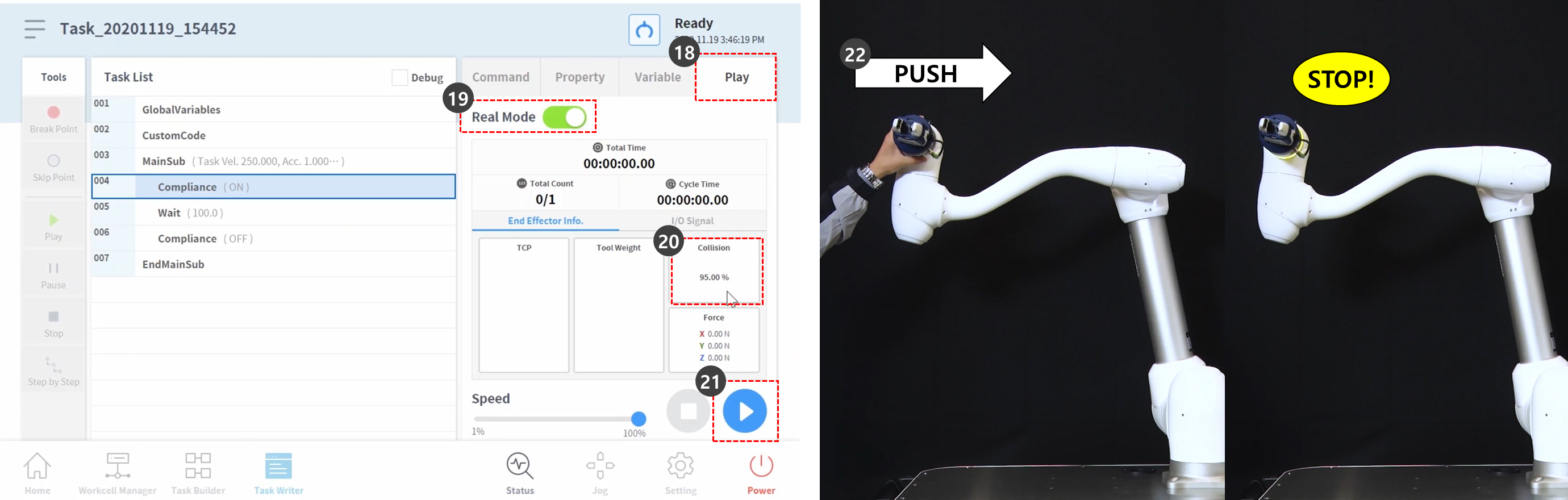
실행(Play) 탭을 선택하십시오.
실제 모드(Real Mode) 토글 버튼을 활성화 시키십시오.
토글 버튼이 활성화되면 버튼이 초록색으로 표시됩니다.
이 예제에서는 순응 제어 사용 시 충돌 민감도(Collision Sensitivity)를 낮춰야 하는 이유를 설명하기 위해 일부러 안전 정지상태로 정지하도록 합니다. 현재 이 예제에서 설정되어있는 충돌 민감도(Collision Sensitivity)는 95% 입니다. 이렇게 높게 설정된 충돌 민감도의 경우 로봇이 충돌에 매우 민감하게 반응합니다.
충돌 시 로봇은 안전 정지 상태로 정지합니다.
실행 버튼을 누르십시오.
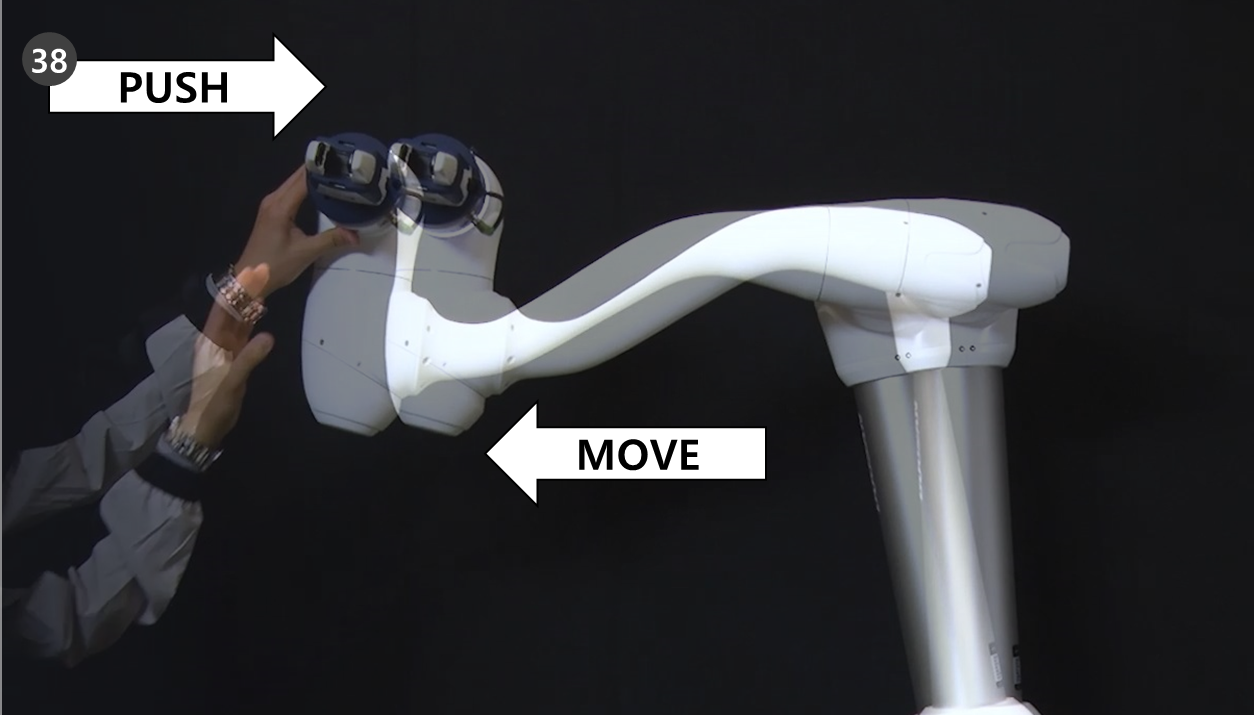
로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇은 충돌 에러가 발생하면서 멈추게 됩니다. 충돌에 의한 안전 정지 상태에서 로봇의 LED 색상은 노란색으로 표시됩니다.
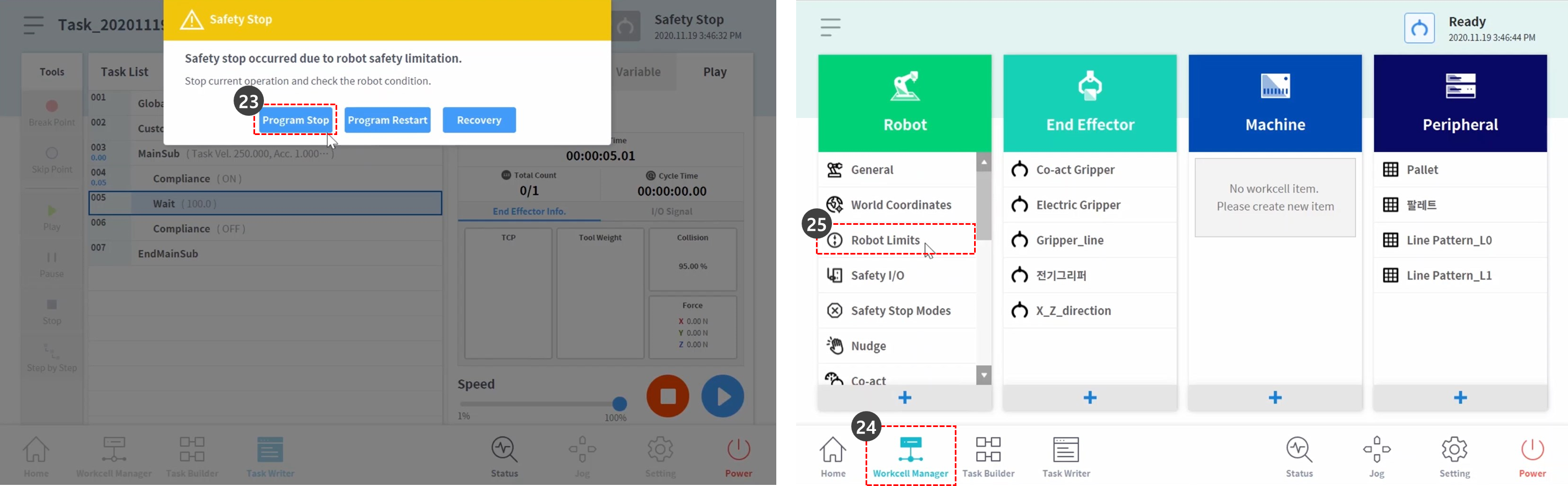
화면에서 노란색 안전 정지 경고 창에서 Program Stop 버튼을 누르십시오. 실행 중인 태스크 프로그램이 중지 됩니다.
하단 메뉴에서 워크셀 매니저(Workcell Manager)를 선택하십시오.
Robot > 로봇 제한치(Robot Limits)를 선택하십시오.
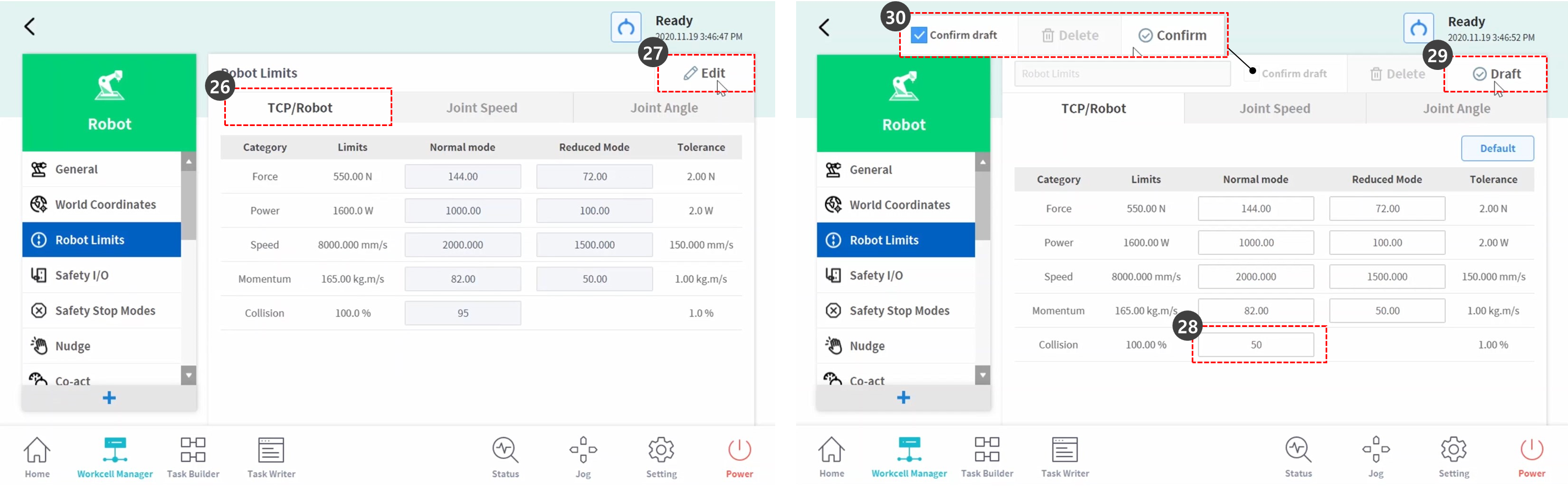
TCP/Robot 탭을 선택하십시오.
편집(Edit) 버튼을 누르십시오.
충돌 민감도(Collision Sensitivity)를 다음과 같이 변경하십시오.
일반 모드(Normal mode) : 50 %
임시 저장(Draft)를 누르십시오.
임시 저장 확정(Confirm draft) 체크 박스를 체크한 후 확인(Confirm) 버튼을 누르십시오.
하단 메뉴에서 태스크 라이터(Task Writer)를 선택하십시오.
화면 좌측에 저장된 파일(Saved file)을 선택하십시오.
첫 번째 태스크의 파일명이 과정 2번에서 지정한 태스크 이름이 맞는지 확인한 후 선택하십시오. 마지막으로 저장한 태스크가 태스크 라이터 파일 리스트의 가장 위쪽에 위치합니다.
열기(Open) 버튼을 누르십시오.
실행(Play) 탭을 선택하십시오.
실제 모드(Real Mode) 토글 버튼을 활성화 시키십시오.
실행 버튼을 누르십시오.
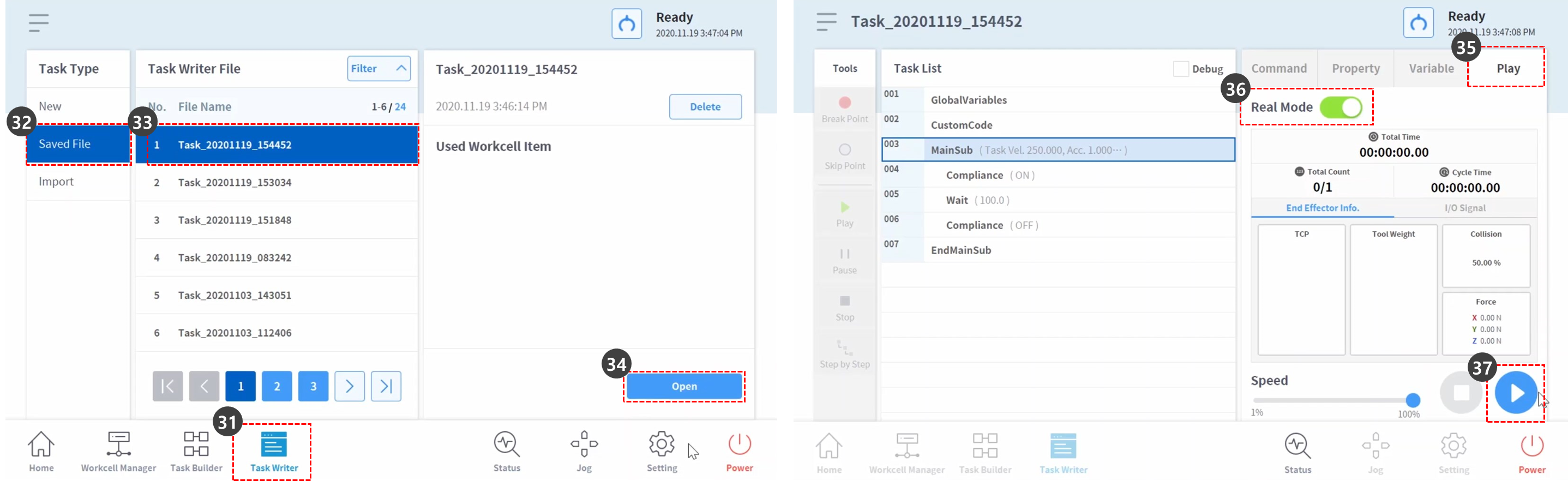
로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇이 미는 힘에 의해 이동했다가 다시 원래 위치로 복귀합니다.