스텝 실행 활용하기
Task Builder/Writer에서 작성된 태스크 프로그램에 대해 사용자가 지정한 명령어 스텝부터 프로그램을 실행할 수 있는 스텝 실행 기능을 제공합니다.
해당 스텝 실행 기능은 디버깅 기능과 같이 활용이 가능합니다.
이 설명은 Task Builder 기준으로 스텝 실행 기능 및 사용 방법을 설명하지만 Task Writer에서도 동일한 방법으로 스텝 실행 기능을 사용할 수 있습니다.
알아두기
스텝 실행하기 위해서는 로봇이 반드시 서보 온 상태여야 합니다. 하단의 상태(Status) > Servo On 버튼을 눌러 로봇을 서보 온 상태로 만들 수 있습니다.
Step Run 기능 사용 불가 명령어는 다음과 같습니다.
GlobalVariables
Mainsub 위에 있는 Custom Code
Break
Exit
Continue
Segments (Move SX, Move SJ, Move B)
Vision / Conveyor / Watch Smart Pendant 내부 명령어
Thread 및 Thread 안에 있는 자식 명령어
Script file의 Custom Code
사용 시나리오는 다음과 같습니다.
Task Builder/Writer 내 Play 탭으로 진입합니다.
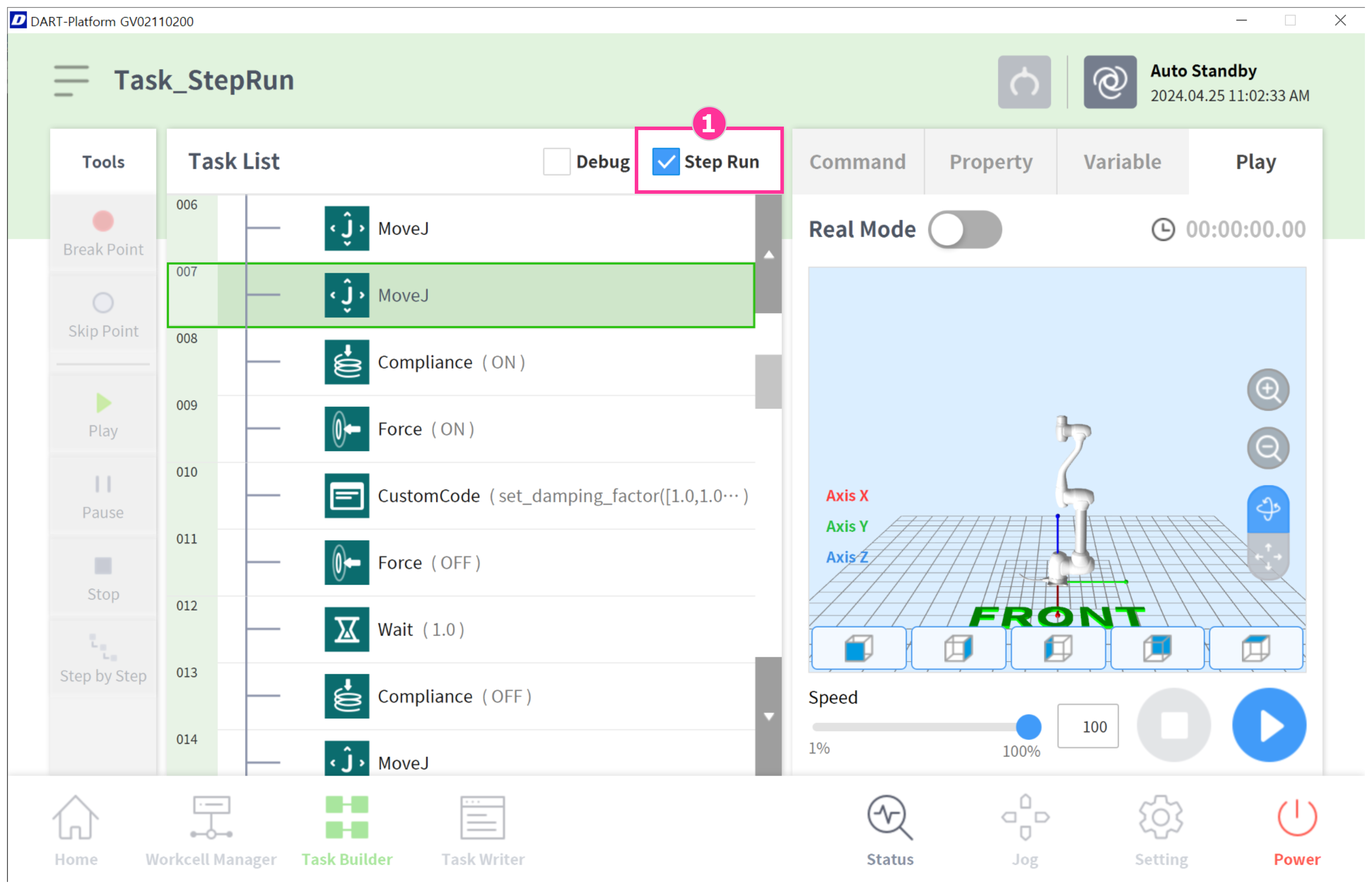
Step Run 기능의 체크 박스를 선택합니다. (1)
실행 모드를 선택합니다. (실제 모드/가상 모드)
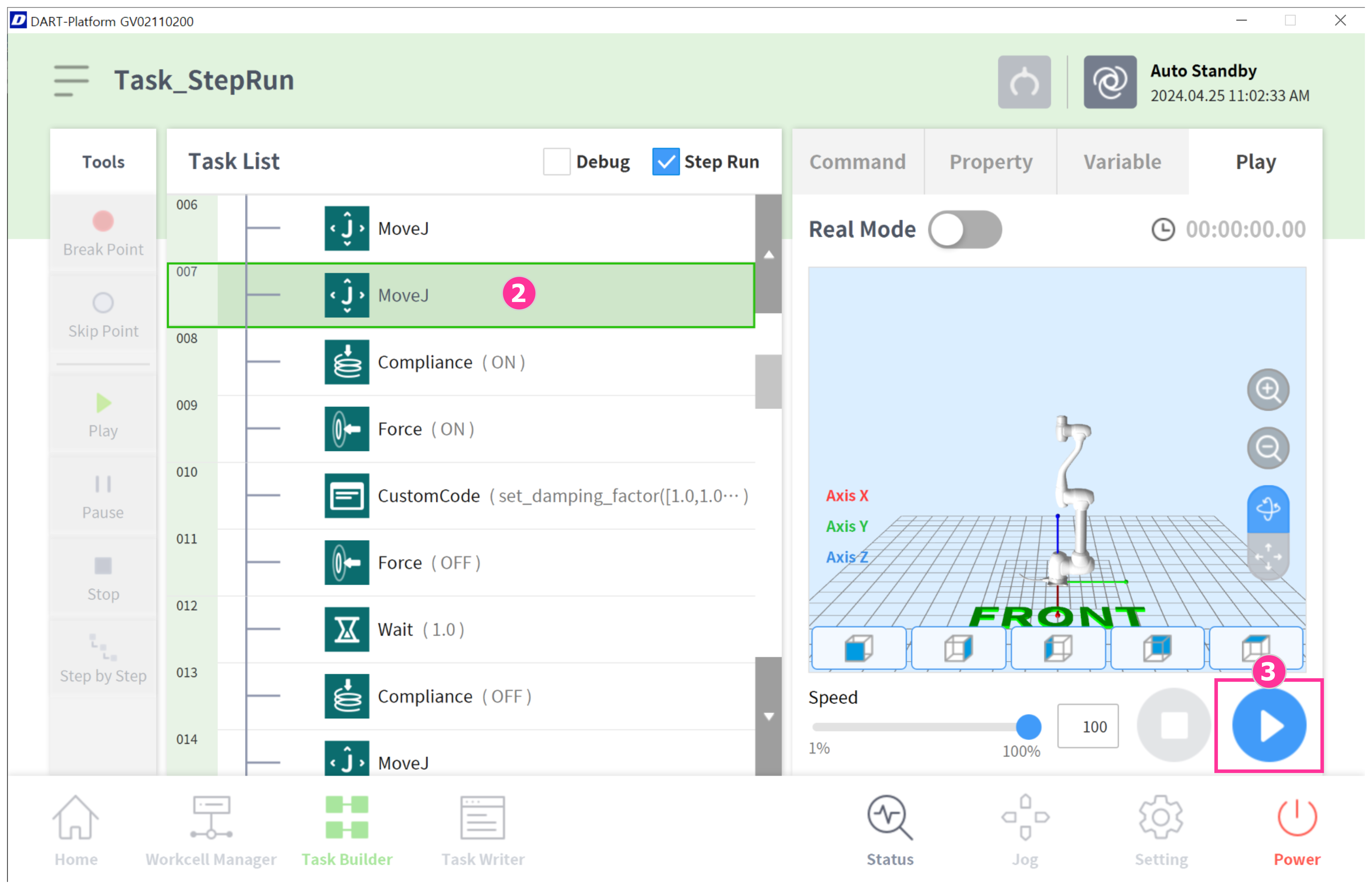
Task List에서 시작할 명령어를 선택하고(2) Play 버튼을 누릅니다.(3)
Step Run Mode 팝업에서 지정된 명령어에서 시작하도록 버튼을 선택합니다.(4)
프로그램을 처음부터 실행하고 싶을 경우 ‘처음부터 실행’ 버튼을 선택합니다.(5)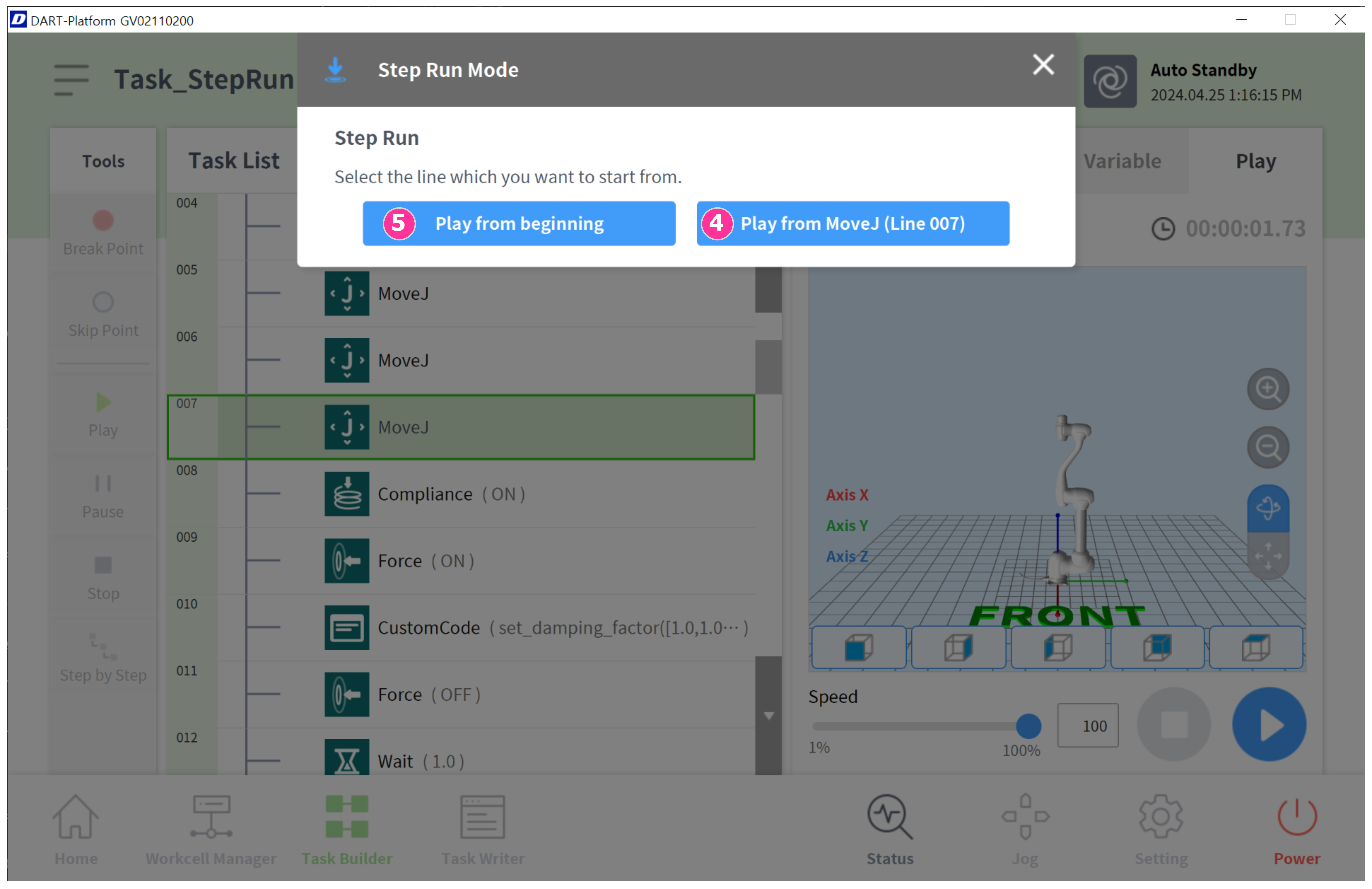
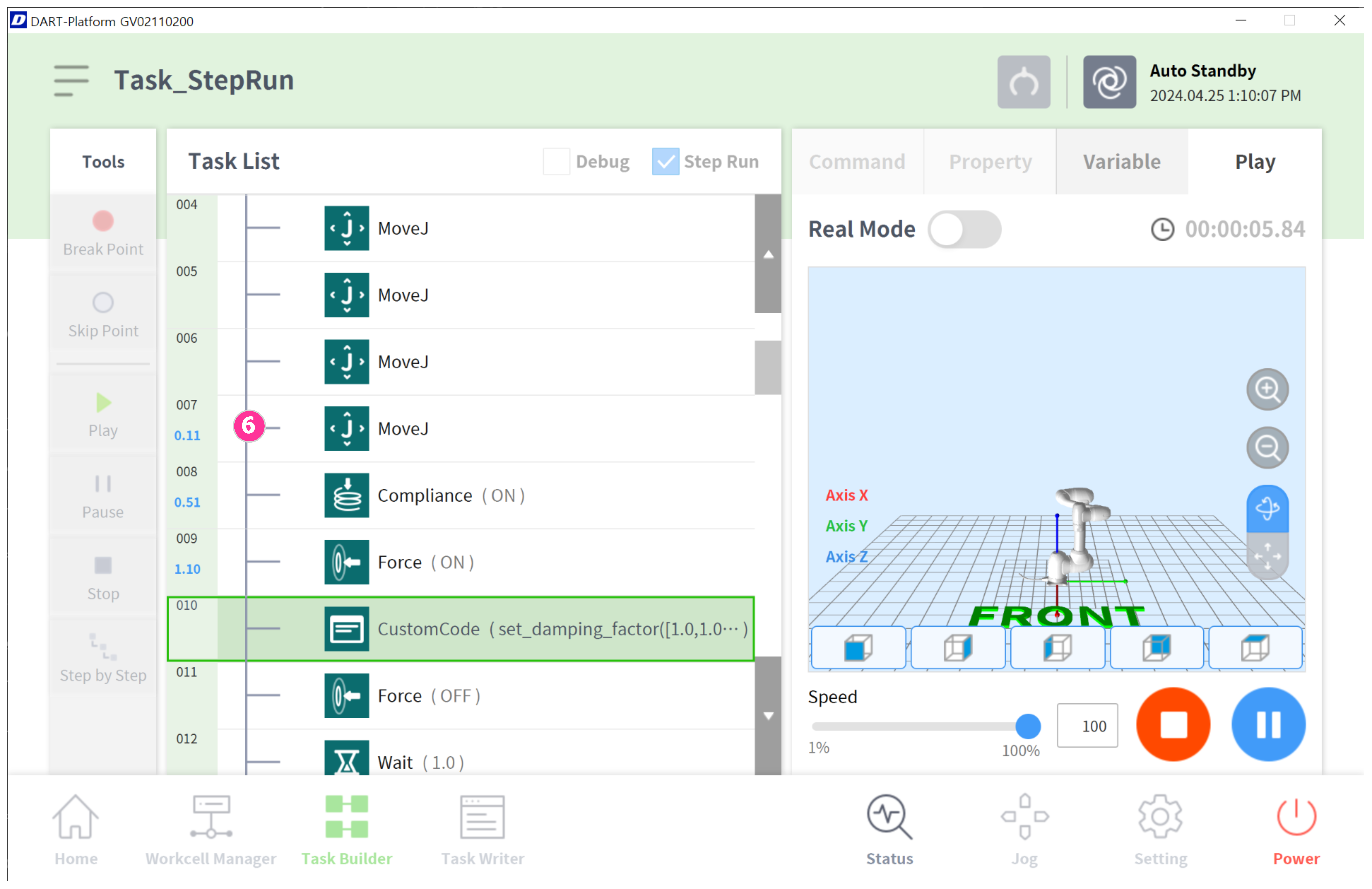
지정 명령어에서 시작하도록 선택하였을 경우 해당 라인부터 프로그램이 실행됩니다.(6)