공간 제한(Space Limit)/구역(Zone)의 형태에 대한 설정 방법은 다음과 같습니다.
항목
설명
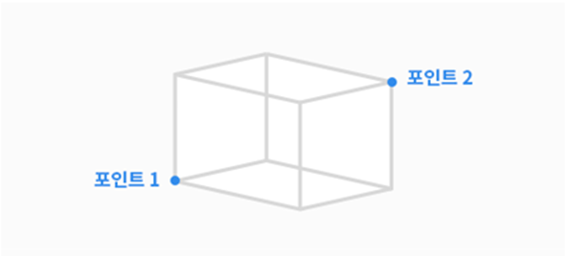
직육면체
공간 제한(Space Limit)/구역(Zone)의 형태를 직육면체로 구성합니다.
직육면체의 하한점(포인트 1)과 상한점(포인트 2)을 입력한 후, 포즈 저장 버튼을 탭 하십시오.
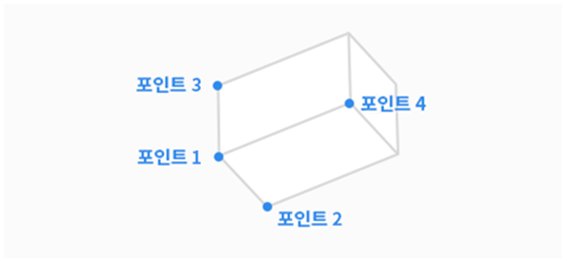
기울어진 직육면체
공간 제한(Space Limit)/구역(Zone)의 형태를 기울어진 직육면체로 구성합니다.
4포인트 입력 방식
기울어진 직육면체의 기준점(포인트 1), x축 끝점(포인트 2), y축 끝점(포인트 3), z축 끝점(포인트 4)을 입력한 후, 포즈 저장 버튼을 탭 하십시오.
포인트1-포인트2, 포인트1-포인트3, 포인트1-포인트4 3개의 선은 각각 직교해야 합니다. (+/- 5도 오차 허용)
포인트1을 기준으로 콕피트의 “면 고정” 및 “축 고정” 구속모션 기능을 사용하면 포인트2, 포인트3, 포인트4의 점을 더욱 쉽게 얻을 수 있습니다.
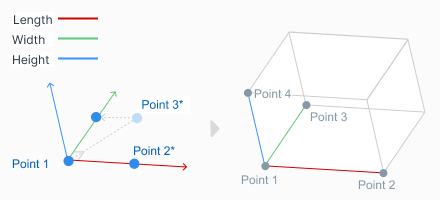
3포인트 & 높이 입력 방식
기울어진 직육면체의 기준점(포인트 1), x축 위의 점(포인트 2), xy평면 위의 점(포인트 3)을 입력합니다.
xy평면 위의 점(포인트 3)의 위치에 따라 기준점(포인트 1)과 x축 위의 점(포인트 2)이 이루는 직선과 수직하고 xy평면에 위치한 y축 방향이 결정됩니다.
기준점과 x축 방향, y축 방향이 결정되면, z축 방향은 오른손 법칙에 의해 결정됩니다.
기준점과 3개 축 방향이 결정된 이후 길이, 폭, 높이 설정을 통해 기울어진 직육면체의 크기를 지정할 수 있습니다.
Offset 설정을 통해 기울어진 직육면체를 평행이동 시킬 수 있습니다.
실제 포인트 1 옆의 move to를 눌러 기울어진 직육면체의 꼭지점으로 이동 후, 실제 포인트 2, 또는 실제 포인트 3, 실제 포인트 4 옆의 move to를 누르면, Robot TCP가 기울어진 직육면체의 모서리를 따라 도달가능한 거리까지 이동합니다. 이런 방식으로 기울어진 직육면체의 위치와 방향설정을 검증할 수 있습니다.
원기둥
공간 제한(Space Limit)/구역(Zone)의 형태를 원기둥으로 구성합니다.
원기둥의 반지름 거리의 점, 윗면의 한 점, 밑면의 한 점을 입력한 후, 포즈 저장 버튼을 탭 하십시오.
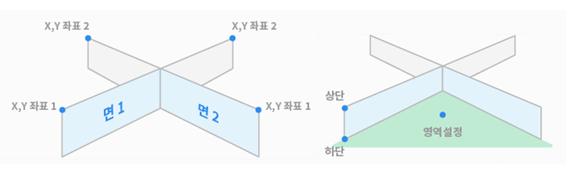
다면 상자
공간 제한(Space Limit)/구역(Zone)의 형태를 다면 상자로 구성합니다.
다면 상자의 상단, 하단의 높이를 지정한 후 포즈 추가 버튼을 눌러 면을 추가합니다.
X, Y좌표를 두 개를 지정하여 면의 방향을 설정한 후 포즈 저장 버튼을 탭 하십시오. 최대 6개의 면을 설정할 수 있습니다.
설정하려는 영역의 점의 좌표를 설정합니다.
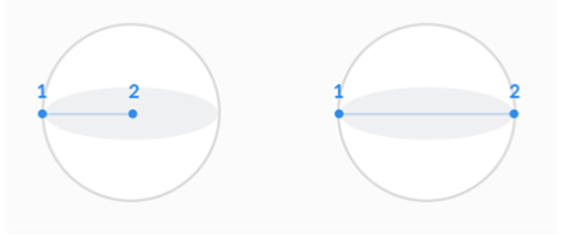
구
공간 제한(Space Limit)/구역(Zone)의 형태를 구로 구성합니다.
반지름으로 설정할 경우 구의 중심점과 끝점의 위치를 입력하고 지름으로 설정할 경우 구의 양 끝점의 위치를 입력한 후, 포즈 저장 버튼을 탭 하십시오.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.