
로봇 설정
로봇 설정 화면은 다음과 같이 구성됩니다.
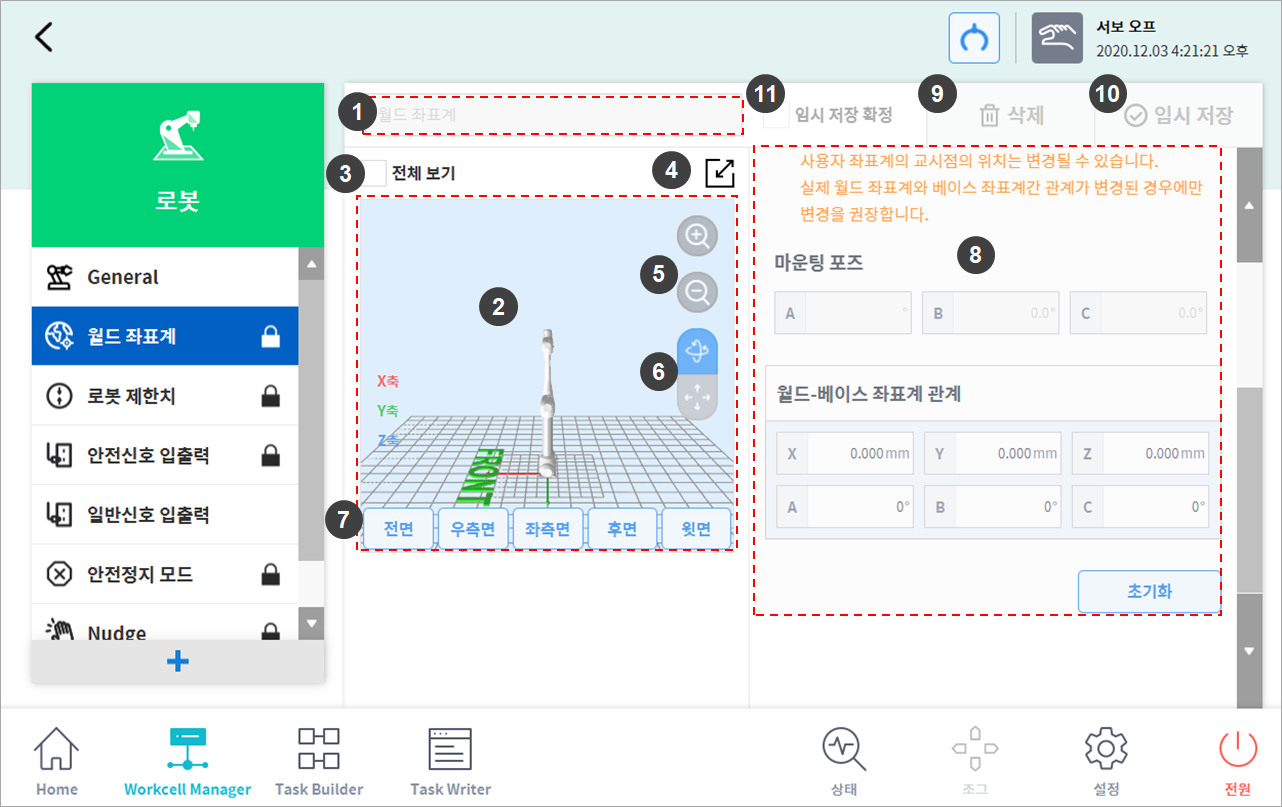
번호 | 항목 | 설명 |
|---|---|---|
1 | 워크셀 이름 입력 | 워크셀의 이름을 입력합니다. |
2 | 시뮬레이션 화면 | 워크셀의 작동 공간 시뮬레이션을 표시합니다. |
3 | 전체 보기 | 등록된 다른 워크셀을 모두 볼 수 있습니다. 체크 박스에 체크하면 모두 보기 기능이 활성화됩니다. 체크를 해제하면 기능이 다시 비활성화됩니다. |
4 | 최대 화면 전환( | 시뮬레이션 화면이 최대 화면으로 전환되어 표시됩니다. 최대 화면에서 축소 화면( |
5 | 확대( | 시뮬레이션 화면을 확대하거나 축소합니다. |
6 | 회전( | 시뮬레이션 화면을 회전하거나 원하는 방향으로 이동합니다. 원하는 버튼을 탭 한 후, 화면을 드래그하거나 탭 하여 조종할 수 있습니다. |
7 | 시뮬레이터 방향 설정 | 시뮬레이터의 방향을 설정합니다. 선택한 방향을 기준으로 시뮬레이션을 표시합니다. |
8 | 작동 공간 | 워크셀의 작동 공간을 표시합니다. |
9 | 삭제 | 현재 설정 중인 워크셀을 삭제합니다. |
10 | 임시 저장 확인 | 임시 저장: 워크셀의 작동 공간 설정을 임시로 저장합니다. 확인: 작업 중인 혹은 임시 저장이 확정된 워크셀의 작동 공간 설정을 저장합니다. (안전 관련 워크셀에서만 임시 저장 확인 후 확인 버튼이 표시하며, 일반 워크셀에서는 확인 버튼으로만 표시됩니다.) |
11 | 임시 저장 확정 | 임시 저장되어 있는 작동 공간 설정을 최종적으로 저장하기 위해 확정합니다. (안전 관련 워크셀에만 표시하며, 일반 워크셀에서는 표시되지 않습니다.) |





