
Tool Settings
Tool Center Point
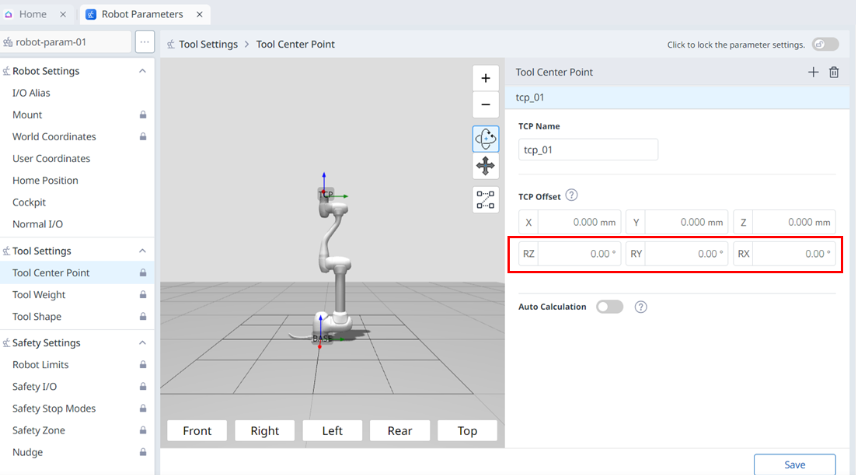
공구중심점(TCP)를 설정할 때에 플랜지 좌표계를 기준으로 위치와 함께 회전각을 함께 정의해야 합니다. 이때, 플랜지좌표계 기준 원점에서 공구중심점(TCP)까지 X, Y, Z 각 방향 별 거리가 10000mm 이상이 되도록 공구중심점(TCP)를 설정할 수 없습니다. 그리고, X, Y, Z의 환산 길이(![]() )가 300mm 이하인 경우에만 힘 제어, 컴플라이언스 제어, 직접 교시-점 고정 기능을 수행할 수 있습니다.
)가 300mm 이하인 경우에만 힘 제어, 컴플라이언스 제어, 직접 교시-점 고정 기능을 수행할 수 있습니다.
자동 계산을 통해서 공구중심점(TCP)을 설정하는 경우 X, Y, Z 위치만 자동 계산되므로 회전각은 사용자가 입력해야 합니다. 회전각은 RZ, RY, RX의 세 가지 항목으로 지정할 수 있으며 이는 ‘오일러 Z-Y-Z (Euler Z-Y-Z angles)’ 회전 방법을 따릅니다.
아래 그림에서 소문자 x, y, z로 표현되는 좌표축과 대문자 X, Y, Z로 표현되는 좌표축의 정의는 다음과 같습니다.
‘플랜지 좌표계’의 좌표축(x, y, z): 플랜지 끝단에 정의되는 ‘플랜지 좌표계’의 좌표축의 방향은 로봇의 조인트 각도가 (0,0,0,0,0,0)일 때 로봇 좌표계와 동일합니다.
‘TCP 좌표계’의 좌표축 (X, Y, Z): 플랜지 끝단에 장착하는 툴의 끝단 또는 작용점(Working Point)에 설정합니다. 이 때 ‘플랜지 좌표계’를 기준으로 ‘TCP 좌표계’의 회전각은 아래 1)~3)의 순서를 따라 정의됩니다.
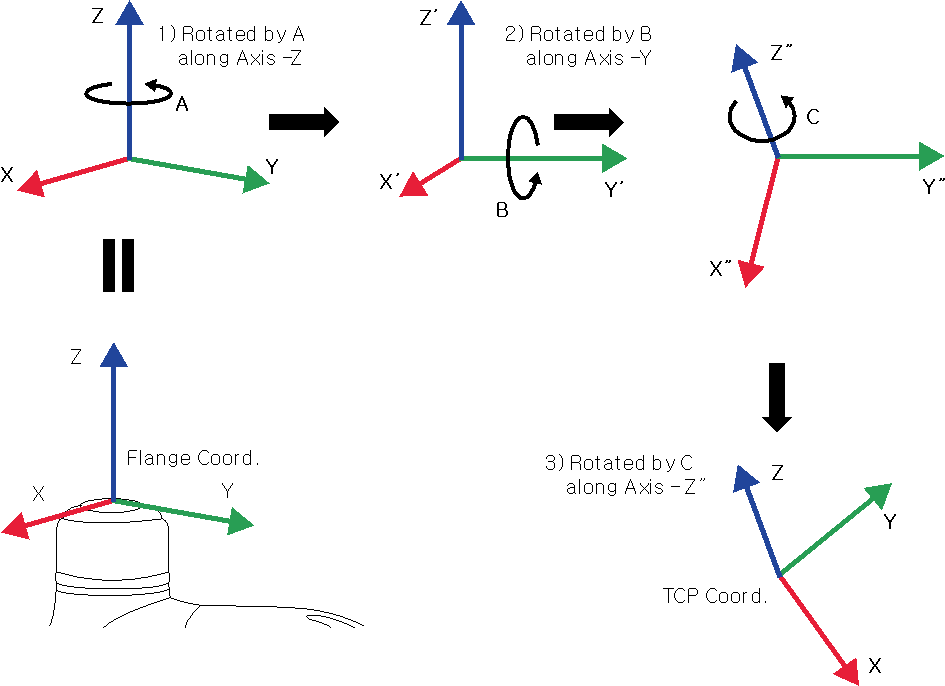
플랜지 좌표계의 z축을 따라 A각도 회전
1)을 통해 회전된 좌표계의 y’축을 따라 B각도 회전
2)를 통해 회전된 좌표계의 z’’축을 따라 C각도 회전
위의 방법을 따라 TCP 값을 설정하는 몇 가지 예를 들어보겠습니다.
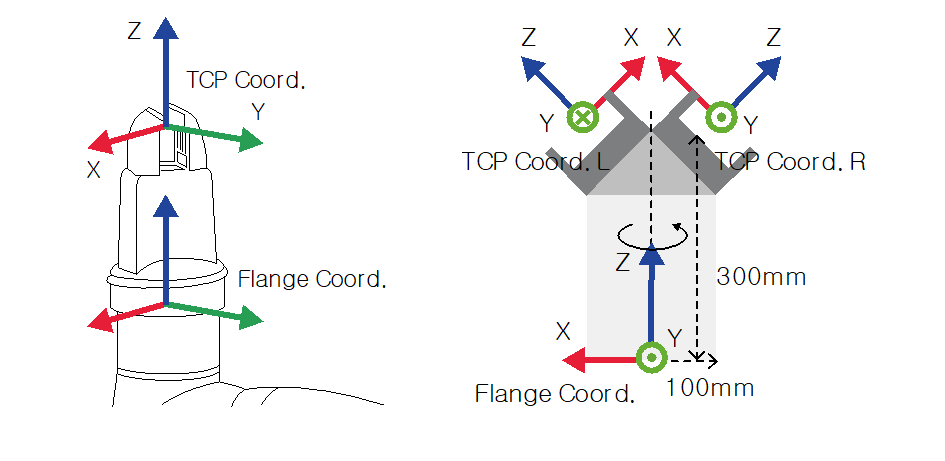
[X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Z방향 옵셋만 있는 일반적인 그리퍼 (TCP Coord)
[X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: 45도 각도를 가진 좌측 그리퍼 (TCP Coord. L)
[X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: 45도 각도를 가진 우측 그리퍼 (TCP Coord. R)
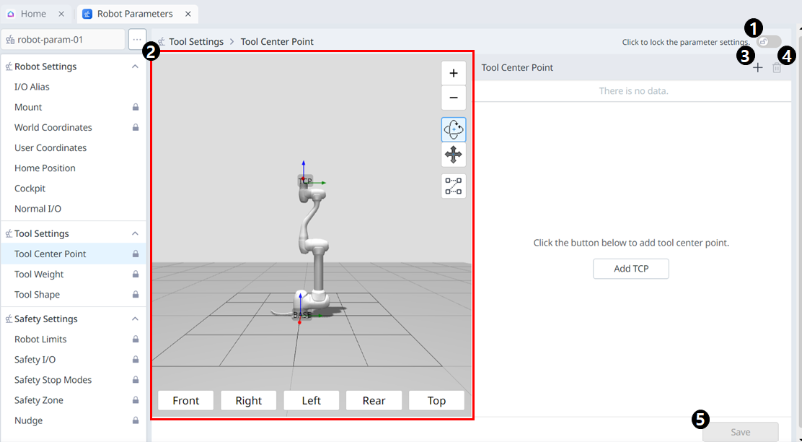
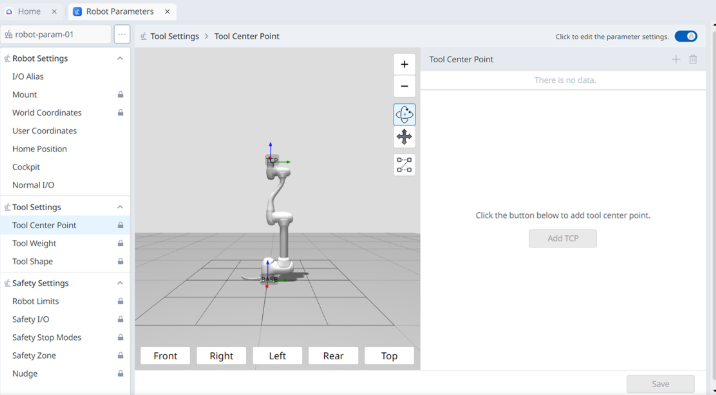
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금됩니다. 값을 수정하기 위해서는 Safety Password의 입력이 필요합니다. |
| 2 | 3D Simulation | 설정한 Tool Center Point를 시뮬레이션 할 수 있습니다. |
| 3 | 추가하기 | TCP를 추가할 수 있습니다. |
| 4 | 삭제하기 | 선택한 TCP를 삭제할 수 있습니다. |
| 5 | Save | 설정 값을 저장할 수 있는 버튼입니다. |
설정이 잠금되었을 때 화면은 다음과 같습니다.
이때 선택한 TCP는 아래와 같이 파란색으로 표시됩니다.

Tool Weight
툴 무게(Tool Weight)를 추가하여 플랜지에 장착된 Tool의 무게를 설정할 수 있습니다. 툴 무게는 Robot Parameters > Tool Settings > Tool Weight 를 선택하여 설정할 수 있습니다.
자동 계산(Auto Measure) 기능을 사용하여 툴 무게를 측정할 수 있습니다.
작업물을 들고 있는 상태에서 툴 무게를 각 무게에 대해 추가할 것을 권장 합니다. 작업물의 무게가 무거울 경우 로봇이 작업물을 들고 있는 무게를 외력으로 인식할 수 있습니다. 로봇은 이 외력을 충돌로 판단하여 로봇이 멈출 수 있기 때문입니다.
태스크를 구성할 때 작업 과정에 따라 툴의 무게를 변경할 수 있습니다. 예를 들어 작업물을 들기 전에는 기본 툴 무게를 선택하고 작업물을 든 이 후에는 작업물을 든 무게를 선택하도록 태스크를 구성할 수 있습니다.
활성화된 툴 무게(Tool Weight) 아이템은 티치펜던트 상단의 툴 설정 아이콘(![]() )을 눌러 기본 툴 무게로 적용(Set)할 수 있습니다.
)을 눌러 기본 툴 무게로 적용(Set)할 수 있습니다.
툴 설정의 적용(Set)은 명령어 중 기타 명령어(Other Command) set과 동일합니다. set 명령어는 태스크 실행 중 Tool Weight을 변경할 때 활용이 가능합니다. 자세한 내용은 Task Editor 모듈를 참고하십시오.
알아두기
툴 무게(Tool Weight)는 최대 50개까지 등록 할 수 있습니다.
M series의 경우 모델별 허용 가능한 최대 툴 무게 초과 설정 시 가속도 자동 조정 기능이 활성화 됩니다.
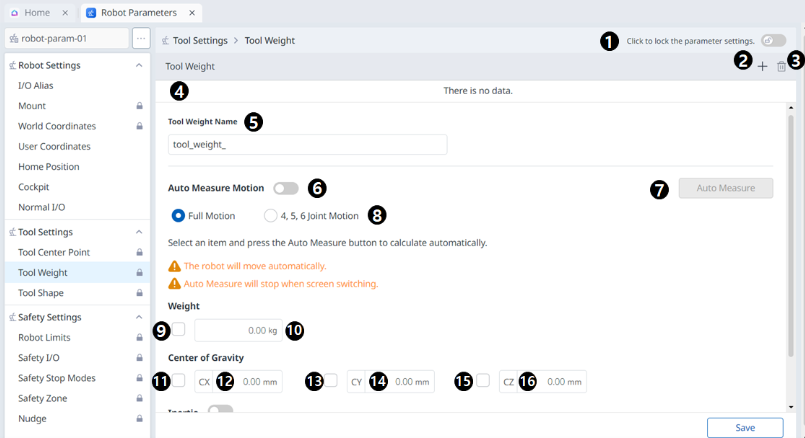

메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | 추가하기 | 새로운 Tool Weight를 추가할 수 있습니다. |
| 3 | 삭제하기 | Tool Weight를 삭제할 수 있습니다. |
| 4 | Tool Weight 리스트 | 설정한 Tool Weight의 리스트입니다. |
| 5 | Tool Weight 이름 | Tool Weight의 이름을 입력할 수 있습니다. |
| 6 | Auto Measure Motion | 자동 측정 기능을 실행할 수 있습니다. |
| 7 | 자동 측정 | 옵션을 선택하고 이에 대한 자동 측정을 실행 할 수 있습니다. |
| 8 | Motion 선택 | 옵션 중 원하는 Motion을 택할 수 있습니다. |
| 9 | Weight 사용 선택 | 무게 사용을 선택할 수 있습니다. E 시리즈 혹은 FPT 센서가 없는 A 시리즈에서는 이 선택 박스가 비활성화됩니다. |
| 10 | Weight 입력 | 원하는 무게를 입력할 수 있습니다. |
| 11 | 무게 중심 CX 사용 선택 | 무게 중심 CX 사용 여부를 선택할 수 있습니다. |
| 12 | CX 입력 | CX를 입력할 수 있습니다. |
| 13 | 무게 중심 CY 사용 선택 | 무게 중심 CY 사용 여부를 선택할 수 있습니다. |
| 14 | CY 입력 | CY를 입력할 수 있습니다. |
| 15 | 무게 중심 CZ 사용 선택 | 무게 중심 CZ 사용 여부를 선택할 수 있습니다. |
| 16 | CZ 입력 | CZ를 입력할 수 있습니다. |
| 17 | 관성 사용 여부 | 관성 사용 여부를 선택할 수 있는 체크박스입니다. |
| 18 | lxx 입력 | 관성의 lxx 항목을 입력할 수 있습니다. |
| 19 | lyy 입력 | 관성의 lyy 항목을 입력할 수 있습니다. |
| 20 | lzz 입력 | 관성의 lzz 항목을 입력할 수 있습니다. |
| 21 | lxy 입력 | 관성의 lxy 항목을 입력할 수 있습니다. |
| 22 | lyz 입력 | 관성의 lyz 항목을 입력할 수 있습니다. |
| 23 | lzx 입력 | 관성의 lzx 항목을 입력할 수 있습니다. |
| 24 | Save | 설정 값을 저장할 수 있습니다. |
Tool Shape
툴 형상(Tool Shape)을 추가하여 플랜지에 장착된 툴의 형상을 설정할 수 있습니다.
툴 형상은 Robot Parameters 모듈 > Tool Settings>Tool Shape 을 선택하여 설정할 수 있습니다. 자세한 내용은 Tool Shape을 참조하십시오.
로봇은 로봇 끝단의 TCP(Tool Center Point)와 로봇 본체를 기준으로 공간 제한 위반 여부를 판단합니다. 실제 로봇에 설정된 TCP보다 툴 형상이 더 큰 경우에는 툴 형상을 추가해야만 작업물과 툴을 보호할 수 있습니다.
툴 형상을 너무 크게 설정하면 실제로 로봇을 움직일 수 있는 영역이 좁아지므로 주의하십시오.
툴 형상 아이템은 등록(Confirm)한 이후에 토글 스위치를 활성화 상태로 전환하여야만 사용할 수 있습니다. 활성화된 툴 무게(Tool Shape) 아이템은 티치펜던트 상단의 툴 설정 아이콘(![]() )을 눌러 기본 툴 형상으로 적용(Set)할 수 있습니다.
)을 눌러 기본 툴 형상으로 적용(Set)할 수 있습니다.
툴 설정의 적용(Set)은 명령어 중 기타 명령어(Other Command) set과 동일합니다. set 명령어는 태스크 실행 중 Tool Shape을 변경할 때 활용이 가능합니다. 자세한 내용은 Task Editor 모듈을 참고하십시오.
알아두기
툴 형상(Tool Shape)은 최대 50개까지 등록 할 수 있습니다.
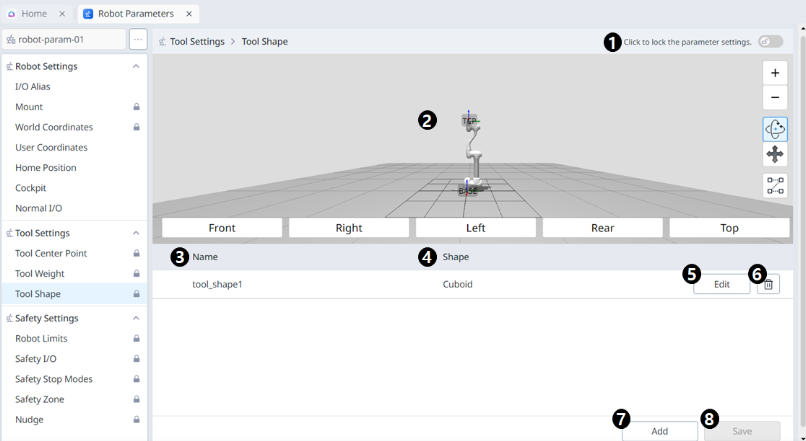
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Lock 토글 버튼 | 설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | 3D Simulation | 설정한 Tool Shape의 결과를 3D Simulation해볼 수 있습니다. |
| 3 | Tool Shape 이름 | 설정된 Tool의 이름입니다. |
| 4 | Tool Shape 모양 | 설정된 Tool의 Shape 형식입니다. |
| 5 | Tool Shape 편집하기 | 설정된 Tool Shape를 편집할 수 있습니다. |
| 6 | Tool Shape 삭제하기 | 선택한 Tool Shape를 삭제할 수 있습니다. |
| 7 | Tool Shape 추가하기 | Tool Shape를 추가할 수 있습니다. |
| 8 | 적용하기 | Tool Shape를 설정 후 적용할 수 있습니다. |
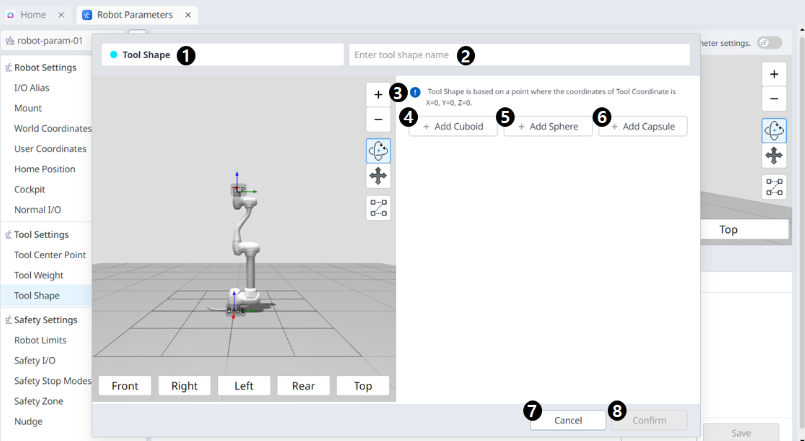
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Tool Shape | Tool Shape 팝업임을 표시합니다. |
| 2 | 이름 입력하기 | Tool Shape의 이름을 입력할 수 있습니다. |
| 3 | 주의 사항 메시지 | 설정 시 주의 사항 메시지입니다. |
| 4 | Add New Cuboid | 입방체를 추가할 수 있습니다. |
| 5 | Add New Sphere | 구체를 추가할 수 있습니다. |
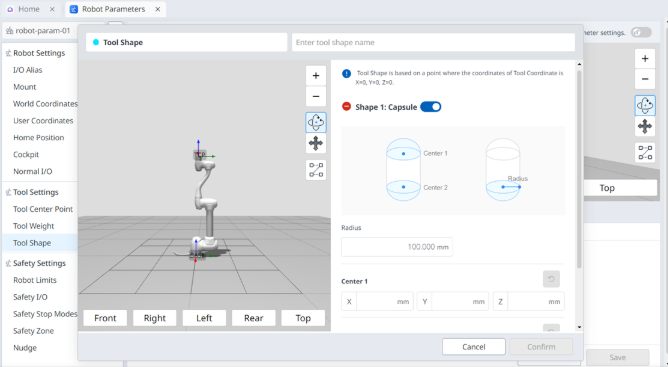
| 6 | Add New Capsule | 캡슐을 추가할 수 있습니다. |
| 7 | Cancel | 설정을 취소할 수 있습니다. |
| 8 | Confirm | 설정을 확정할 수 있습니다. |
입방체 / 구체 / 캡슐을 추가했을 때의 디스플레이는 다음과 같습니다.
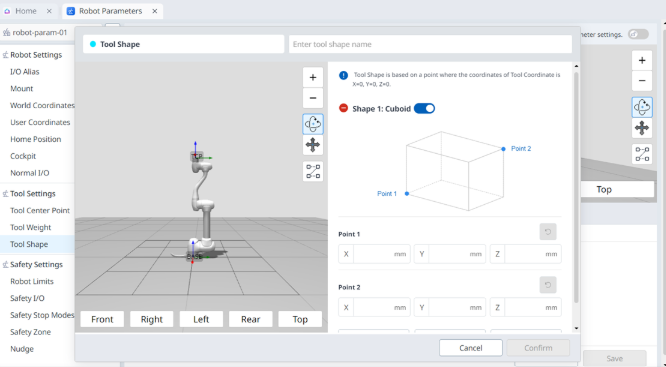 | 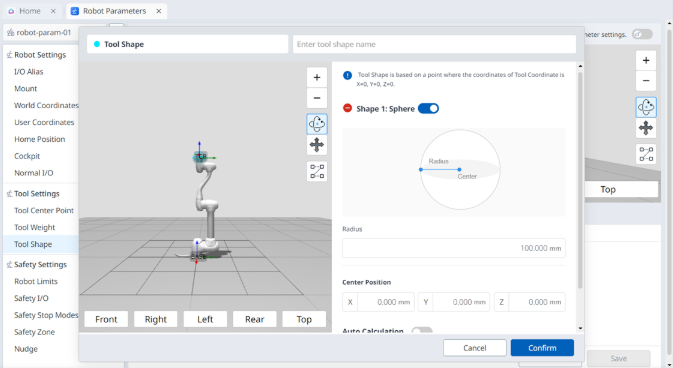 |
 |