
Recovery 모듈
Recovery Module: 안전 위반이 지속되는 오류가 발생하거나 운반/운송을 위해 로봇을 포장할 경우 안전복구 모드를 이용해 사용자가 지정한 위치와 각도로 로봇을 설정할 수 있습니다.

Recovery 모듈은 하단의 Recovery 버튼을 통해 들어갈 수 있습니다.
소프트웨어 복구: 로봇이 운전 영역을 벗어나거나 침범 금지 영역을 침범하는 등 위치 관련 안전 위반이 발생한 경우 또는 고정물과 충돌이 발생한 상태로 멈추어 지속적으로 외력이 가해지고 있는 경우 등 안전 위반이 지속되는 오류가 발생하여 서보 오프 상태에서는 조그나 프로그램 실행을 통해 로봇을 정상 상태 되돌리려해도 서보 온이나 조그가 불가능 할 수 있습니다. 이런 경우 소프트웨어 복구 모드를 이용해 로봇을 정상 상태로 되돌립니다.
패키징 모드: 로봇을 포장하여 운반 또는 운송할 경우 포장을 위해 설정된 (정상 작동 시의 각도 제한치를 넘어선) 값으로 로봇의 포즈를 변경한 후 이동할 수 있습니다.
Recovery 모듈을 시작할 때 서보가 활성화 되어 있을 경우, 다음과 같은 팝업이 뜨면서 자동으로 서보 OFF 됩니다.
소프트웨어 복구 모드 사용하기
소프트웨어 복구 모드
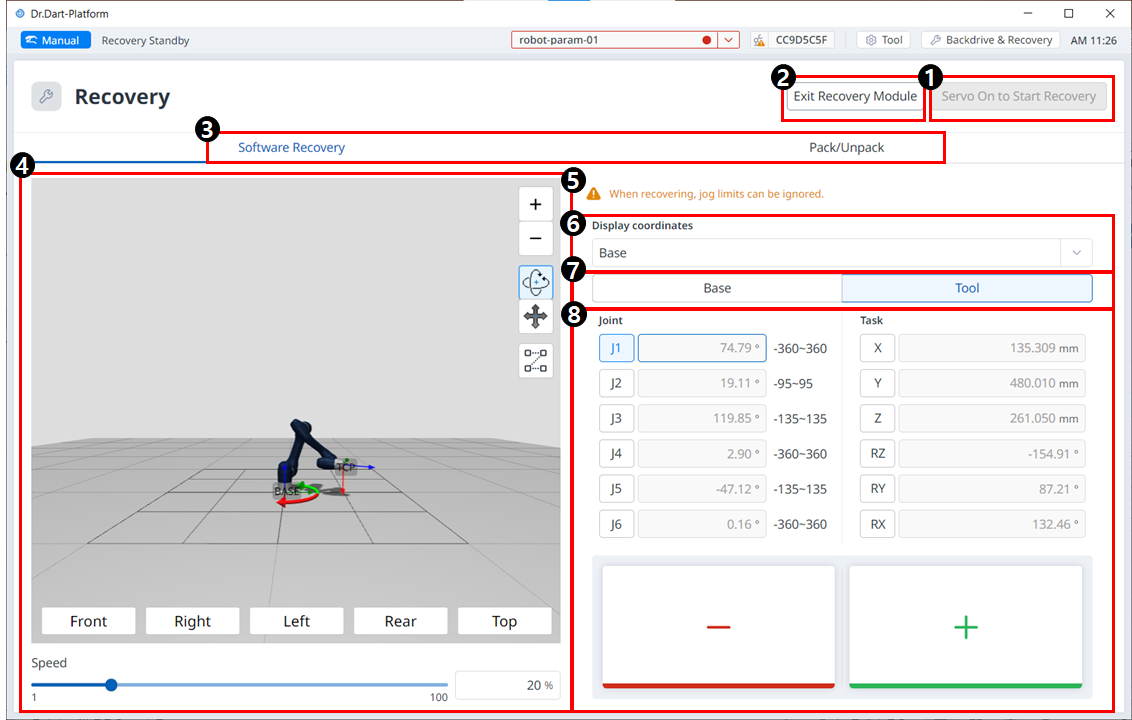
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Servo On to Start Recovery | Recovery 모드를 시작하기 전에 서보를 활성화하는 버튼입니다. |
| 2 | Exit Recovery | Recovery 모듈에서 나갈 수 있는 버튼입니다. |
| 3 | Header | 소프트웨어 복구 모드 혹은 팩/언팩 모드 중 하나를 선택할 수 있습니다. |
| 4 | 3D Simulation | 설정한 값을 3D로 미리 시뮬레이션 해 볼 수 있습니다. |
| 5 | Warning Message | 주의 사항을 설명합니다. |
| 6 | Display Coordinates | Base 혹은 World 기준으로 좌표계를 설정할 수 있습니다. |
| 7 | Base/Tool Button | Base 혹은 Tool 기준으로 값을 설정할 수 있습니다. |
| 8 | Joint/Task | 원하는 값을 입력하여 로봇을 움직일 수 있습니다. |
소프트웨어 복구 모드를 사용하려면:
주 메뉴 창에서 Recovery 메뉴를 탭 하십시오. Recovery 창에서 소프트웨어 복구 화면이 자동으로 활성화됩니다.
소프트웨어 복구 화면 오른쪽 조인트 설정 창에서 각 조인트 버튼을 탭 한 후
 ,
,  버튼으로 위치를 설정하십시오. 혹은 콕피트의 버튼을 눌러 직접교시를 통해 조인트 각도를 조정하십시오.
버튼으로 위치를 설정하십시오. 혹은 콕피트의 버튼을 눌러 직접교시를 통해 조인트 각도를 조정하십시오.콕핏의 버튼 정의는 Cockpit을 참조하세요.
설정 값을 변경하면 왼쪽 시뮬레이션 창에 실시간으로 반영됩니다.
설정이 완료되면 왼쪽 상단의 X버튼을 탭 해 창을 닫으십시오.
주의
소프트웨어 복구 모드는 조인트 각도 제한이 3도를 초과한 상태에서 사용할 수 없습니다.
팩/언팩 사용하기
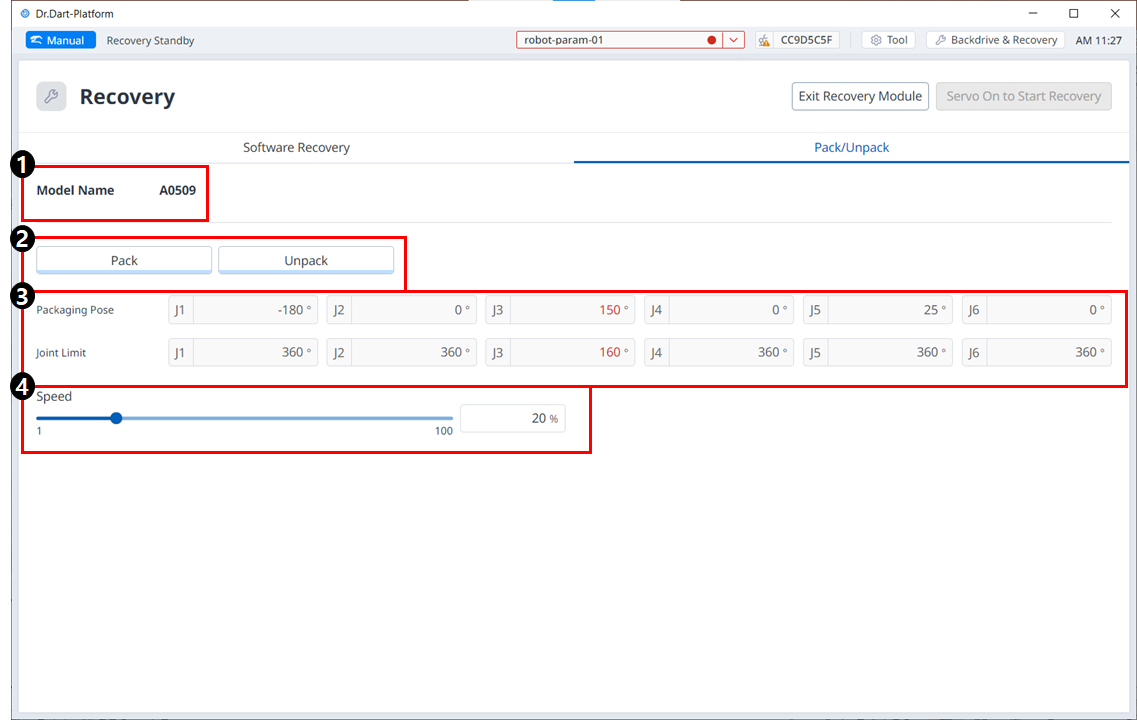
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | 모델 이름 | 연결된 로봇 모델의 이름이 나타납니다. |
| 2 | Pack/Unpack | Pack과 Unpack 중 하나를 선택할 수 있습니다. |
| 3 | Packaging Pose/Joint Limit | 자세 및 조인트 제한치 값이 나타납니다. |
| 4 | Speed Ratio | 팩 혹은 언팩 모드의 속력을 슬라이더 혹은 입력을 통해 조절할 수 있습니다. |
패키징 모드를 설정하려면:
헤더 창에서 Recovery 메뉴를 탭 하십시오.

패키징 모드 탭을 선택하십시오.

Servo On to Start Recovery 버튼을 탭 해 패키징 모드를 활성화하십시오.

설정된 패키징 포즈로 로봇이 자동으로 이동합니다.
Pack 버튼으로 로봇을 팩 자세로 만들거나 Unpack 버튼으로 Default Home Position을 만들 수 있습니다.