
Home Position & Cockpit
Home Position
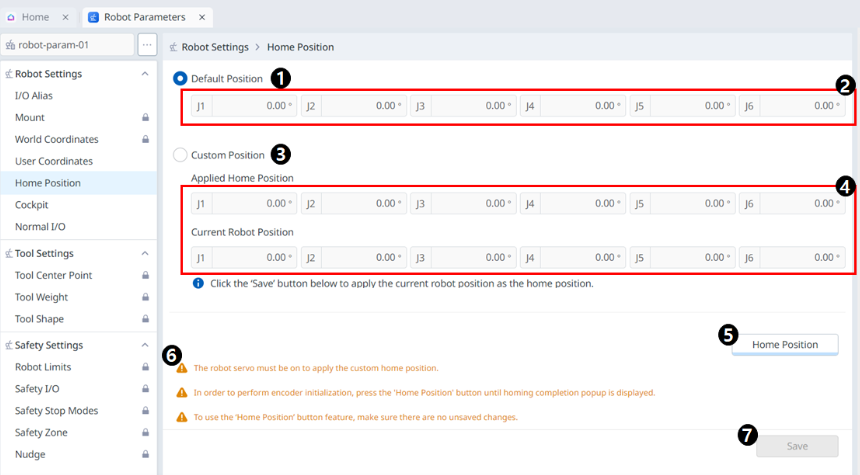
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | Default Position option | Default Position 옵션을 선택할 수 있습니다. |
| 2 | Default Position 값 | Default Position에 해당하는 값으로 모든 항목이 0입니다. |
| 3 | Custom Position option | Custom Position 옵션을 선택할 수 있습니다. |
| 4 | Custom Position 값 | 현재 설정된 Custom Position 값과 현재 로봇의 위치를 확인 할 수 있습니다. |
| 5 | Home Position | Default Position 혹은 설정한 Custom Position을 Home Position으로 설정합니다. |
| 6 | Warning Message | 설정할 때의 주의 사항입니다. |
| 7 | Save | 설정 값을 저장할 수 있는 버튼입니다. |
주의
로봇 또는 로봇의 관절을 교체하는 경우, 사용자 홈 위치를 재설정 해야합니다.
Cockpit
직접 교시는 로봇의 끝단을 손으로 잡고 직접 로봇을 밀거나 당겨서 원하는 자세로 움직이고 그 위치를 현재 선택한 모션에 적용하기 위해 사용합니다. 직접 교시 방식은 크게 두 가지로 구분됩니다.
자율이동 (Freedrive) : 사용자가 가한 힘의 방향으로 로봇의 각 관절이 이동
구속모션 (Constrained Motion): 임의의 방향으로 힘을 가하여도 구속조건에 맞는 방향으로만 로봇 끝단이 이동 또는 회전
자율이동
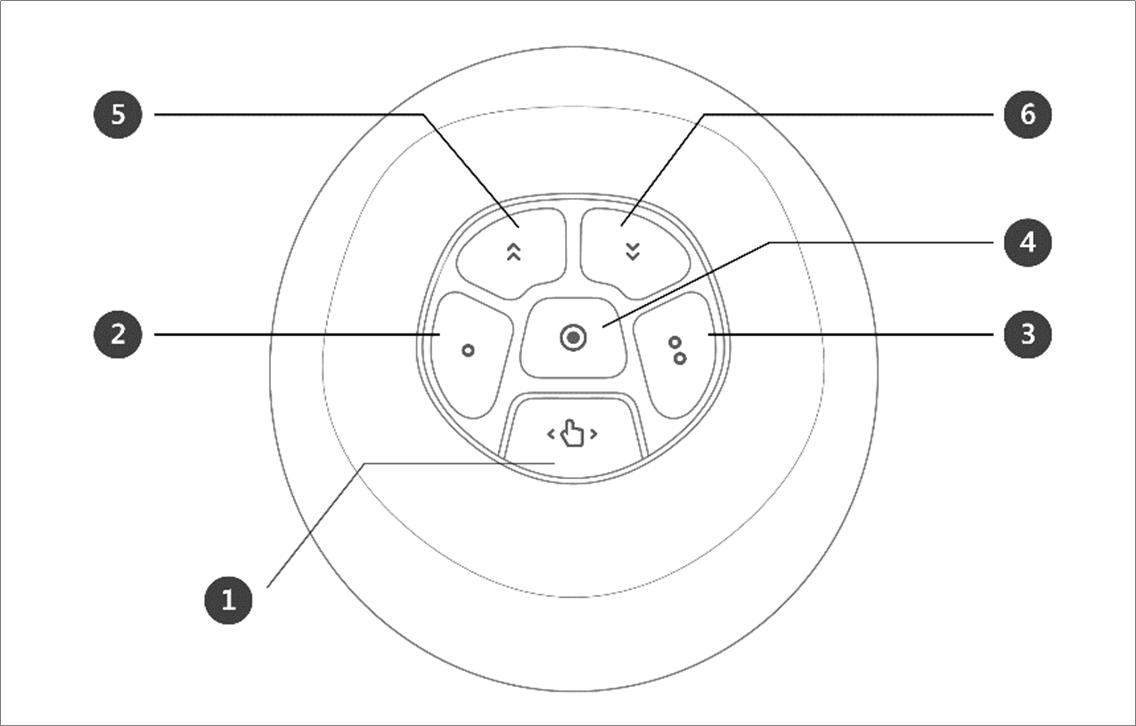
1번 버튼을 누른 상태에서는 자율이동(Freedrive) 모드가 되어 로봇을 자유롭게 움직일 수 있습니다. 사용자가 가한 힘의 방향으로 로봇의 각 관절이 이동합니다. 버튼에서 손을 떼면 로봇을 수동으로 움직일 수가 없습니다.
직접 교시를 할 때는 로봇 LED가 시안색으로 깜빡이는 것을 볼 수 있습니다.
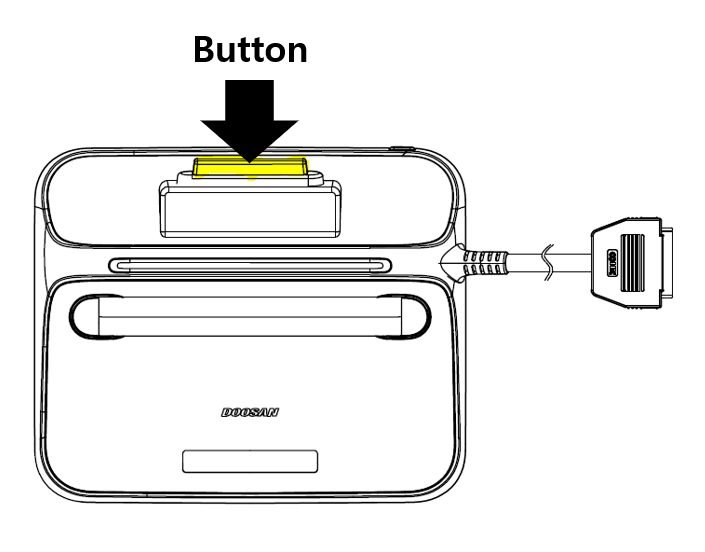
티치 펜던트 뒷면의 핸드가이드 버튼을 누르면 1번 버튼을 누른 것과 동일하게 자율이동 모드로 로봇을 움직일 수 있습니다.
구속 모션
2번과 3번 버튼을 누른 상태에서는 임의의 방향으로 힘을 가하여도 로봇 끝단이 구속 조건과 일치하는 방향으로만 움직이게 됩니다. 구속 조건은 그림과 같이 Z축 고정, 면 고정, 점 고정, 방향 고정 이렇게 4가지 중 2가지를 선택하여 지정할 수 있습니다.
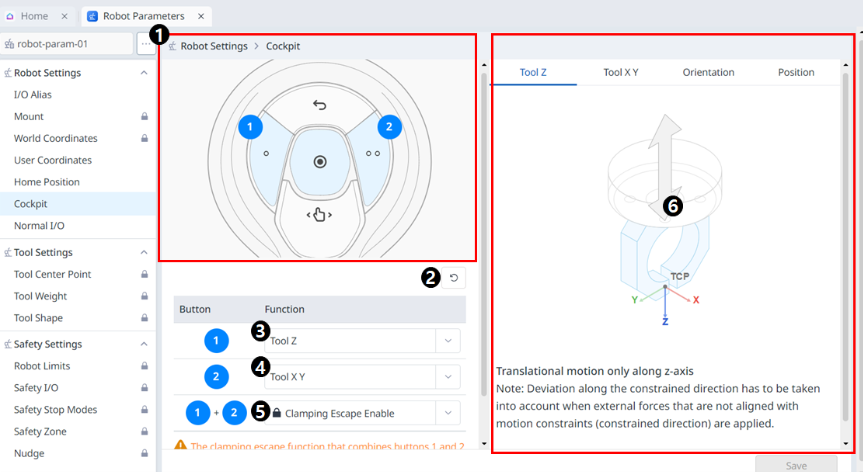
메뉴 구성
항목 | 설명 | |
|---|---|---|
| 1 | 콕핏 이미지 | 콕핏 설정을 위한 이미지 입니다. |
| 2 | 리셋 | 설정한 값들을 초기화 시킬 수 있습니다. |
| 3 | 1 버튼 설정 | 1 버튼에 설정할 기능을 선택할 수 있습니다. |
| 4 | 2 버튼 설정 | 2 버튼에 설정할 기능을 선택할 수 있습니다. |
| 5 | 1+2 버튼 설정 | 1+2 버튼 clamping 활성화 여부를 선택할 수 있습니다. |
| 6 | 가이드 이미지 | 콕핏 설정 항목에 대한 이미지 가이드입니다. |
Cockpit Button 상태 정보 얻기
Cockpit Button의 Pressed 또는 Released 정보를 얻을 수 있습니다.
로봇은 Cockpit Button의 제어하기 위한 기능을 제공하면서, 다양한 Application에서 이를 활용하도록 합니다.
통신 API의 “모니터링 Data”에서 Cockpit Button의 정보를 제공하고 있습니다.
로봇의 Cockpit Button을 눌렀거나 반대의 경우, DRL API를 통해 이를 감지할 수 있습니다.
DRL API: get_cockpit_input (Programming Manual을 참고하세요.)
매개변수 (Params): (int) index
반환값 (Returns): (int) 1: Pressed (버튼이 눌린 상태), 0: Released (버튼이 눌리지 않은 상태)