
순응(Compliance) 명령어 예제 따라하기
주의
예제를 시작하기 전에 반드시 주의사항을 확인하십시오. 자세한 내용은 PART 1. 안전 매뉴얼을 참조하십시오.
알아두기
순응 제어를 켜거나 끌 때 임계값(Threshold of JTS error) 이상의 외부 토크가 있으면 로봇은 JTS(Joint Torque Sensor) 오류로 프로그램을 정지합니다.
강성(stiffness) 변경(Change)은 외부 토크의 크기와 관계없이 실행 할 수 있습니다.
순응 제어 중에는 MoveJ 명령어와 같은 조인트 모션을 수행할 수 없습니다.
Threshold of JTS error (Nm) | ||||||
Model | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
E0509 | 15 | 15 | 15 | 15 | 15 | 15 |
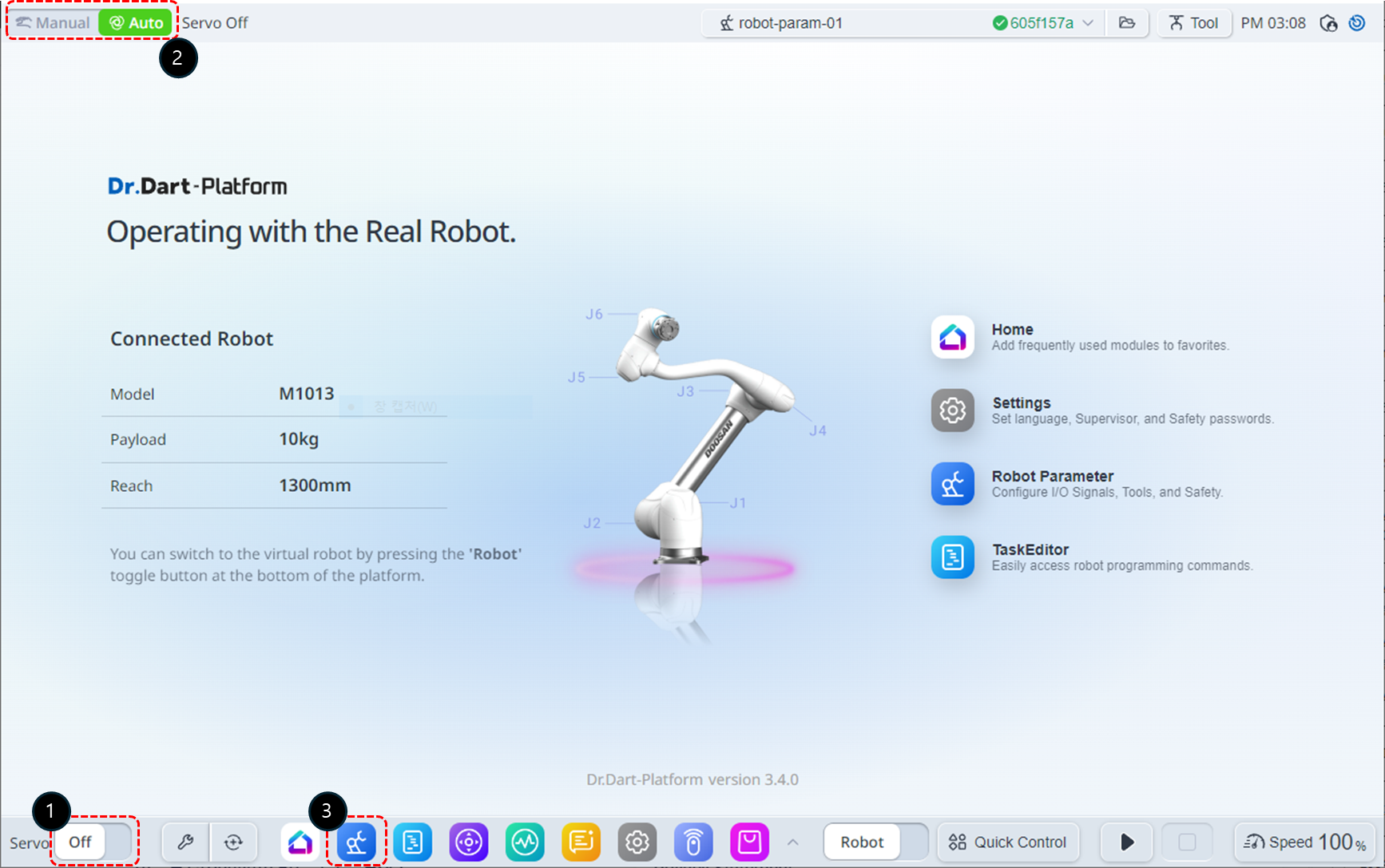
로봇의 Servo 상태를 On으로 변경하십시오.
로봇의 동작 Mode를 Manual로 변경하십시오.
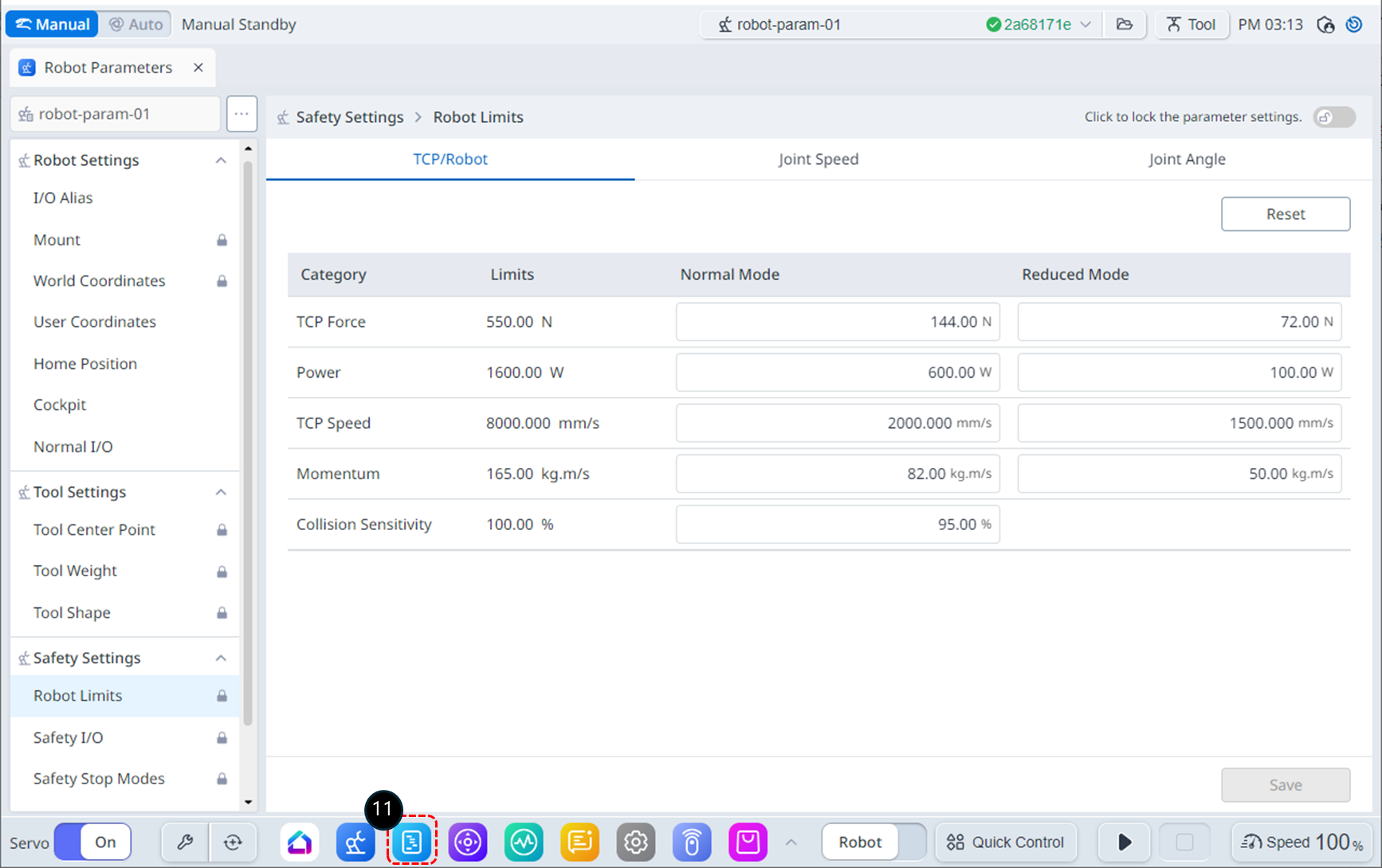
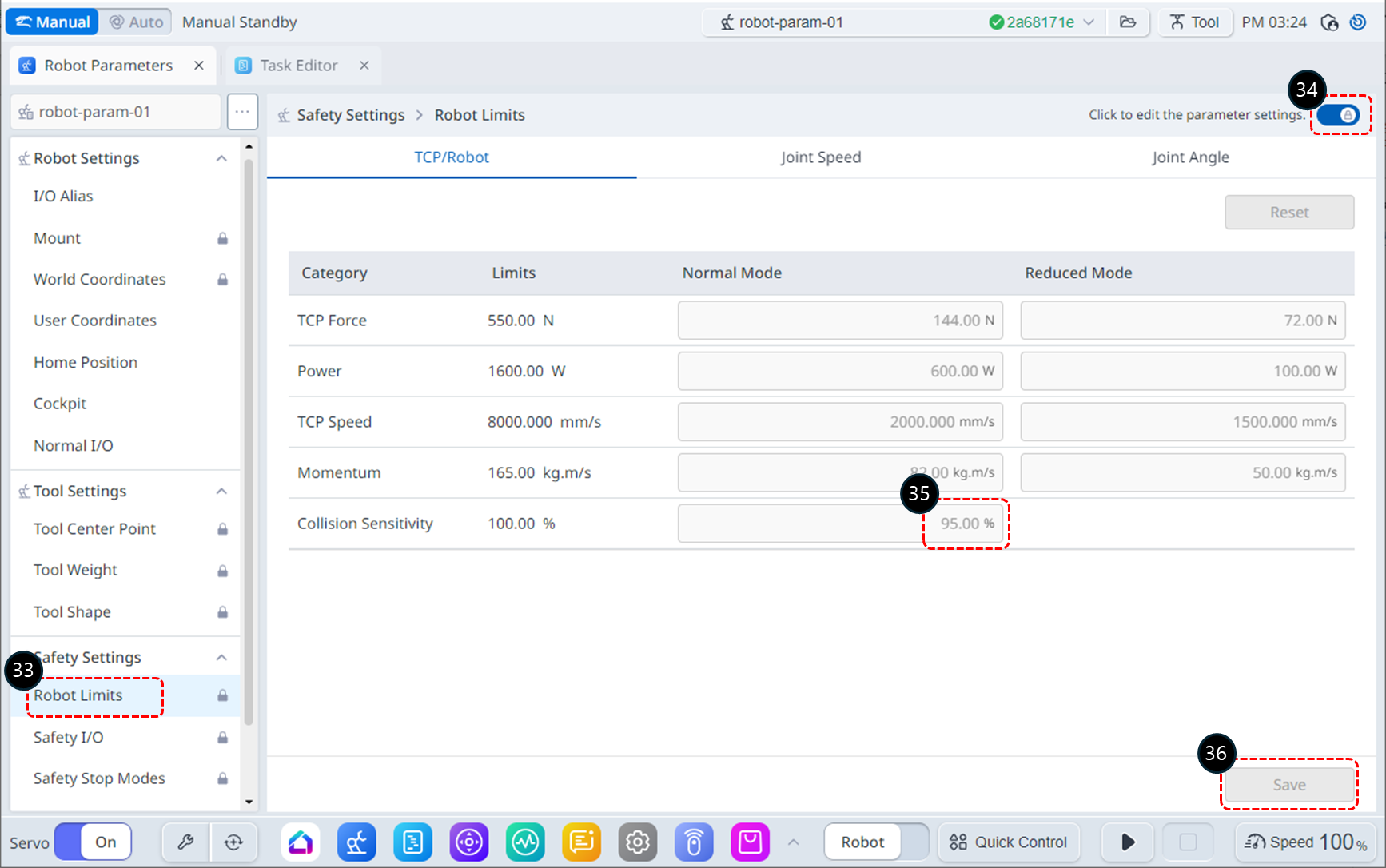
하단 메뉴에서 Robot Parameters 모듈을 선택하십시오. 이 예제에서는 순응 제어 사용 시 충돌 민감도(Collision Sensitivity)를 낮춰야 하는 이유를 설명하기 위해 충돌 민감도(Collision Sensitivity)를 95%로 설정합니다.
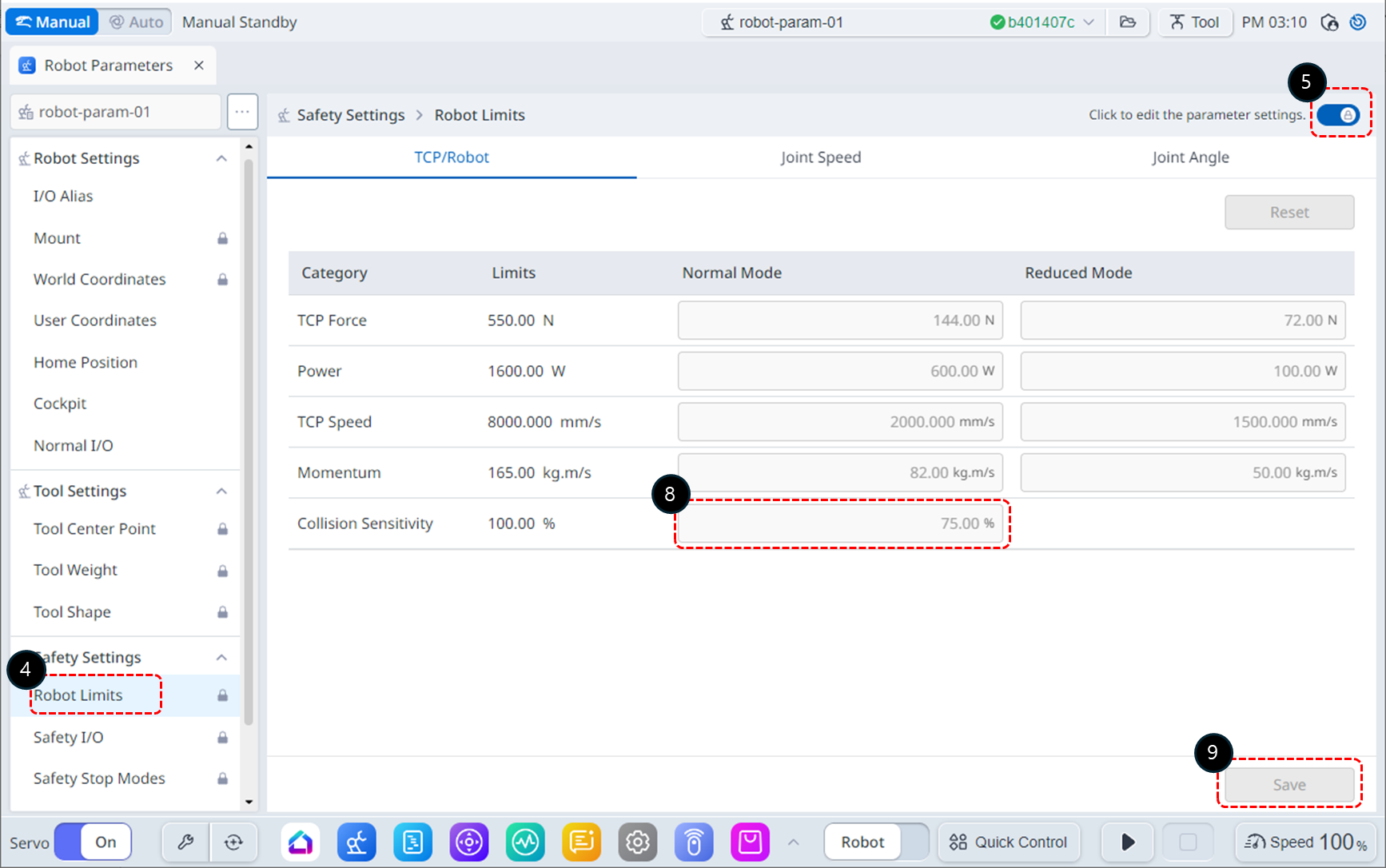
Safety Settings의 Robot Limits를 선택하십시오.
파라미터 편집 가능 상태를 활성화 하십시오.
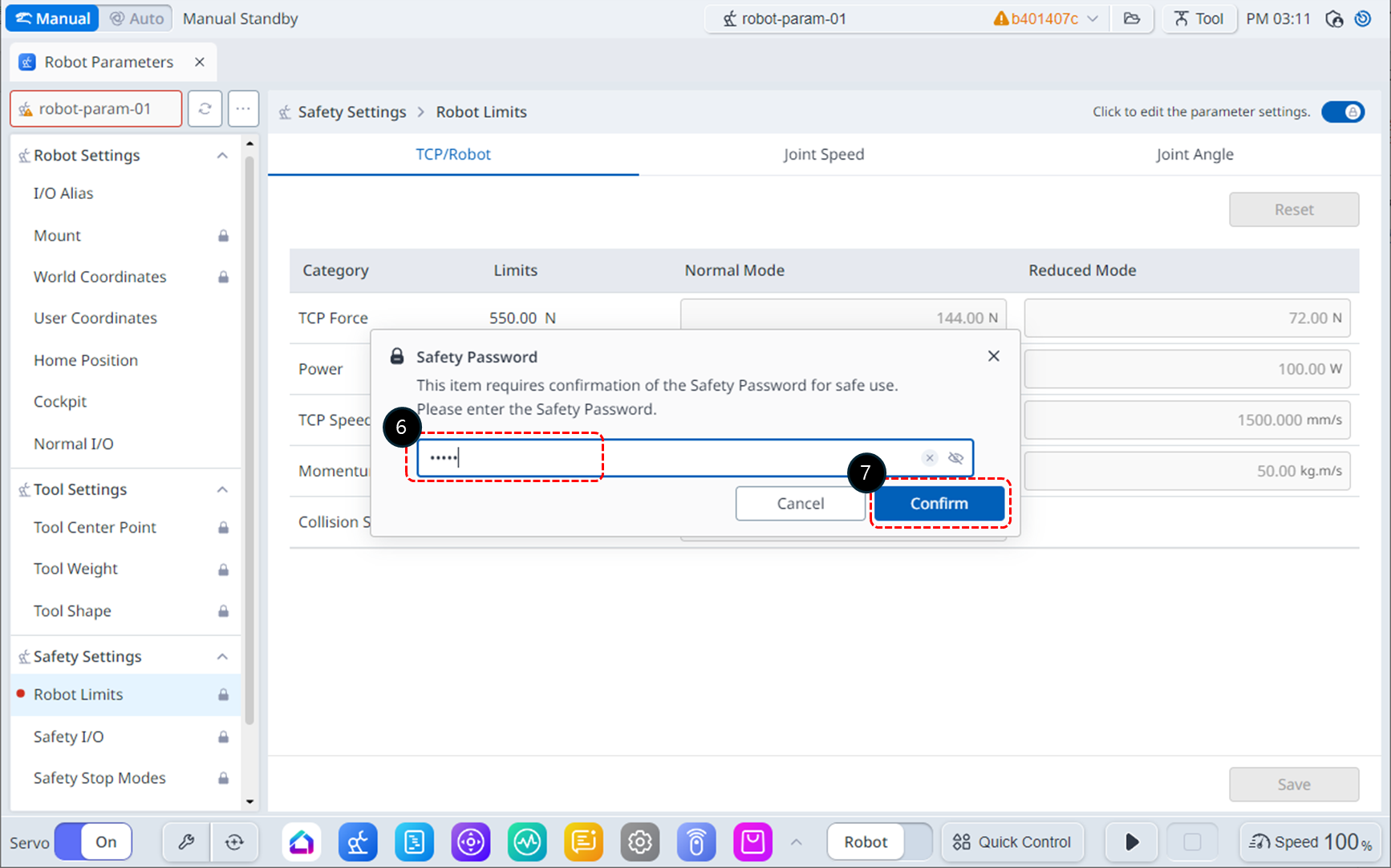
비밀번호 입력창이 나올 시에 Safety Password를 입력하십시오. (default safety password: admin)
확인(Confirm) 버튼을 누르십시오.
충돌 민감도(Collision Sensitivity)를 95%로 수정하십시오.
설정 저장(Save) 버튼을 누르십시오.
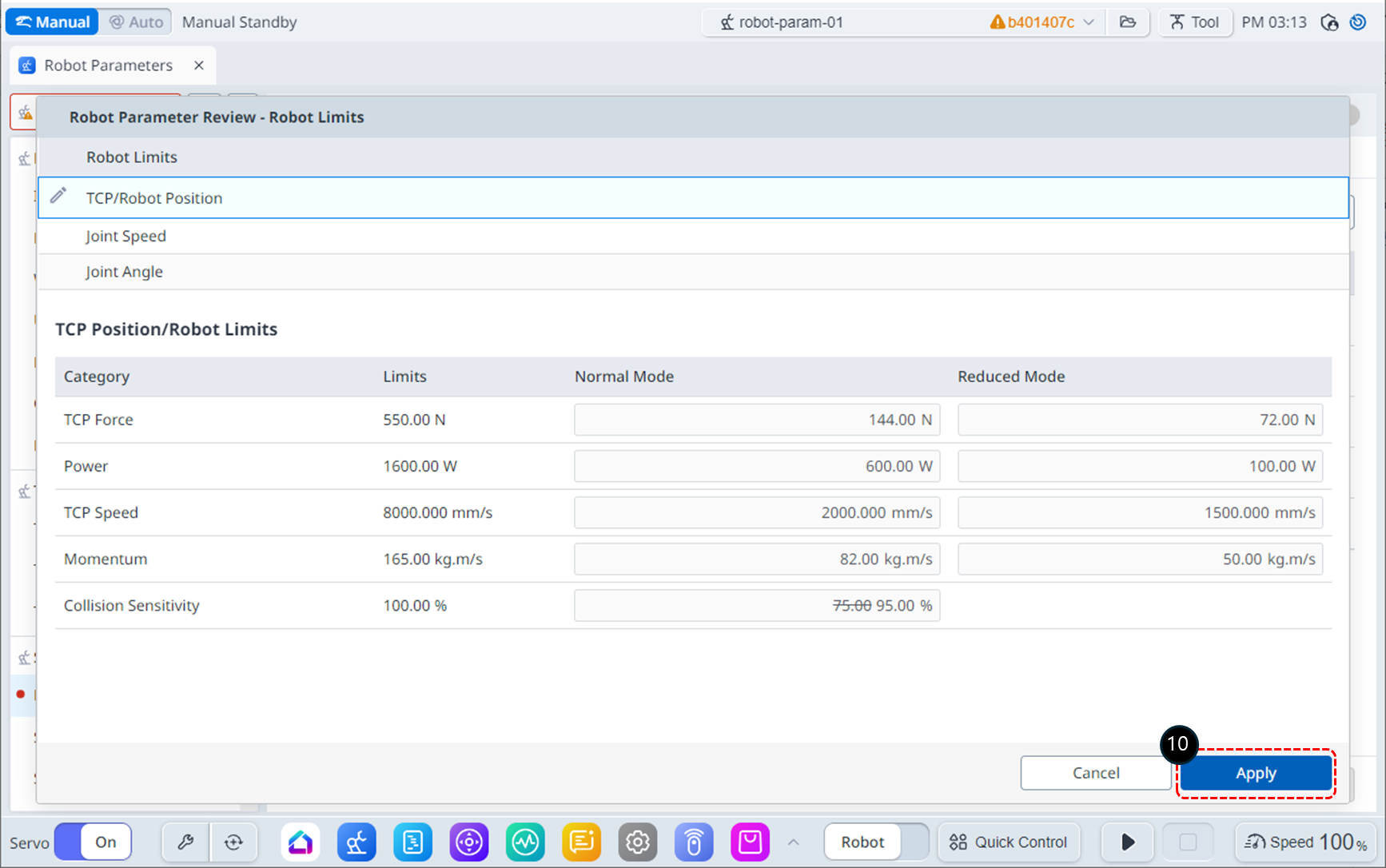
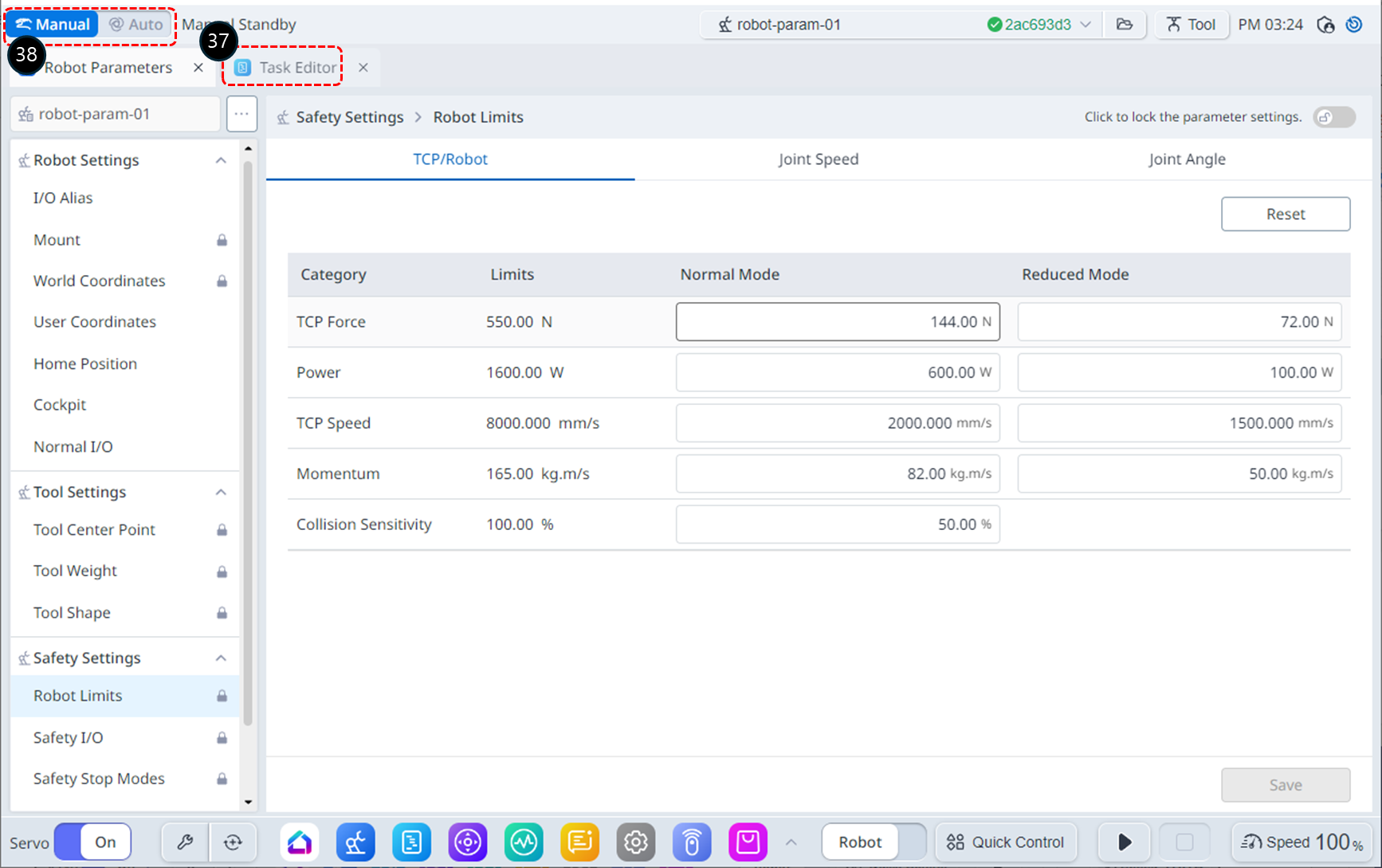
수정사항을 확인하신 후에 적용(Apply) 버튼을 누르십시오.
하단 메뉴에서 Task Editor 모듈을 선택하십시오.
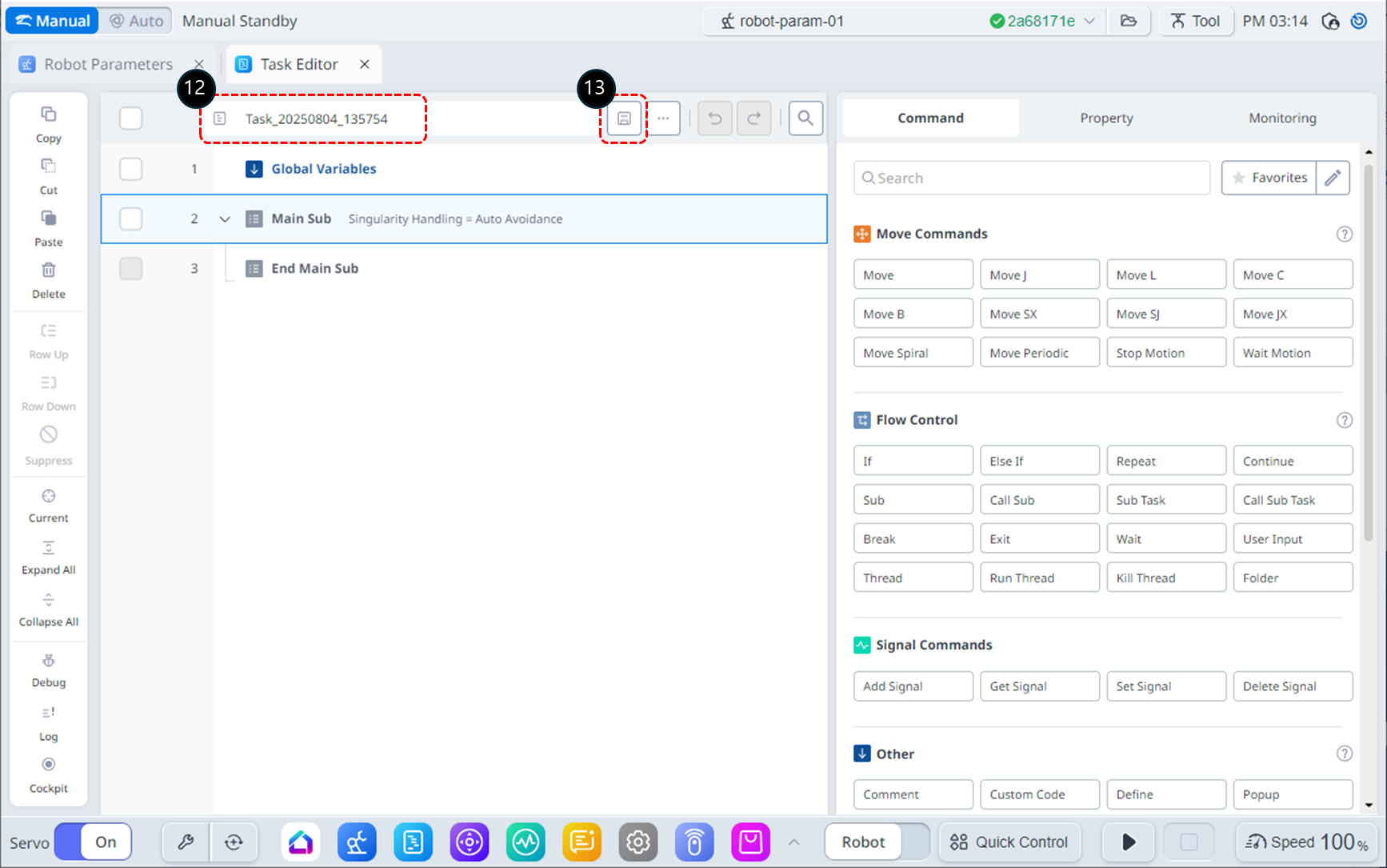
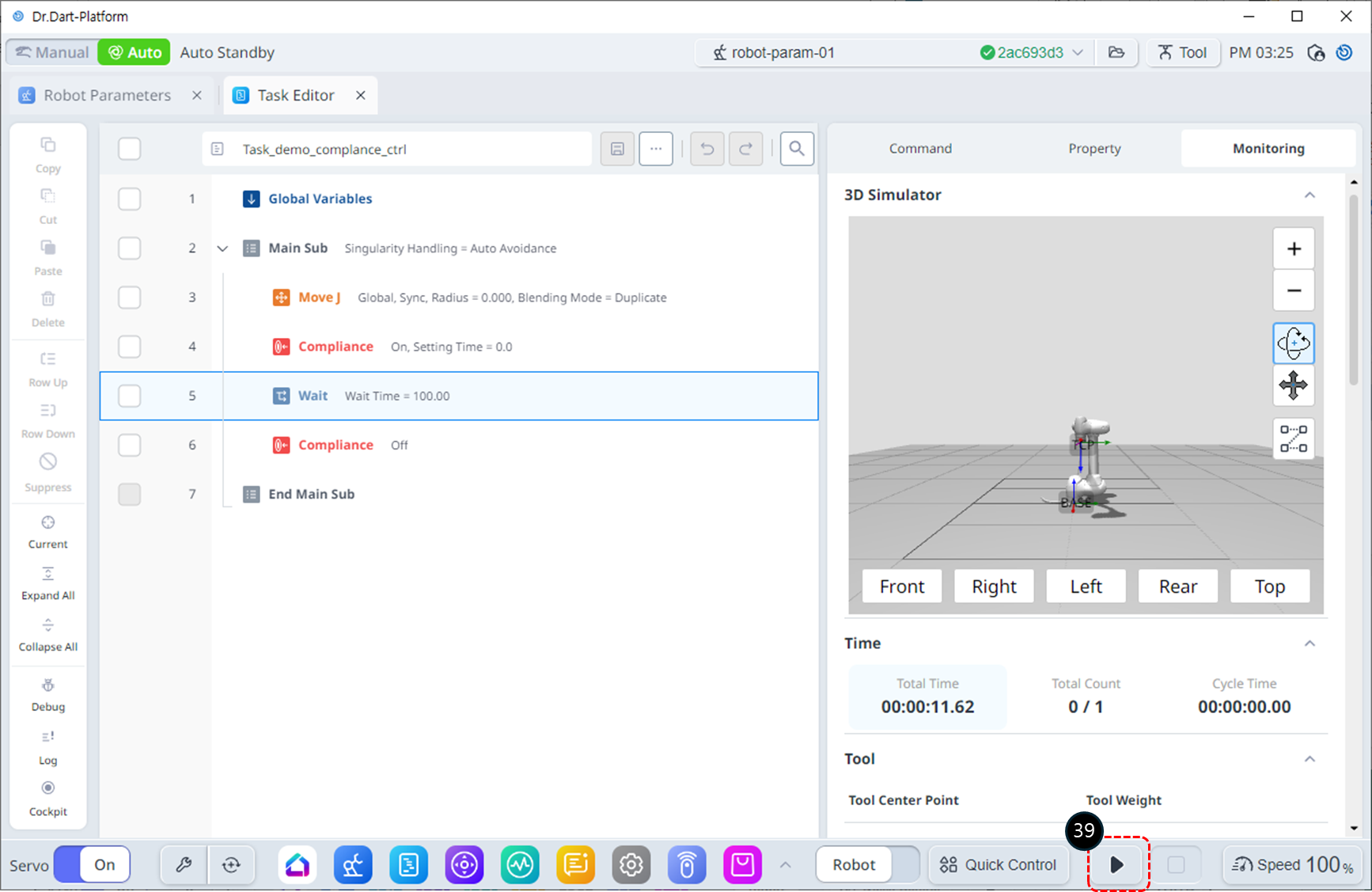
Task 이름을 Task_demo_compliance_ctrl로 수정하십시오.
수정한 Task 이름을 저장하십시오.
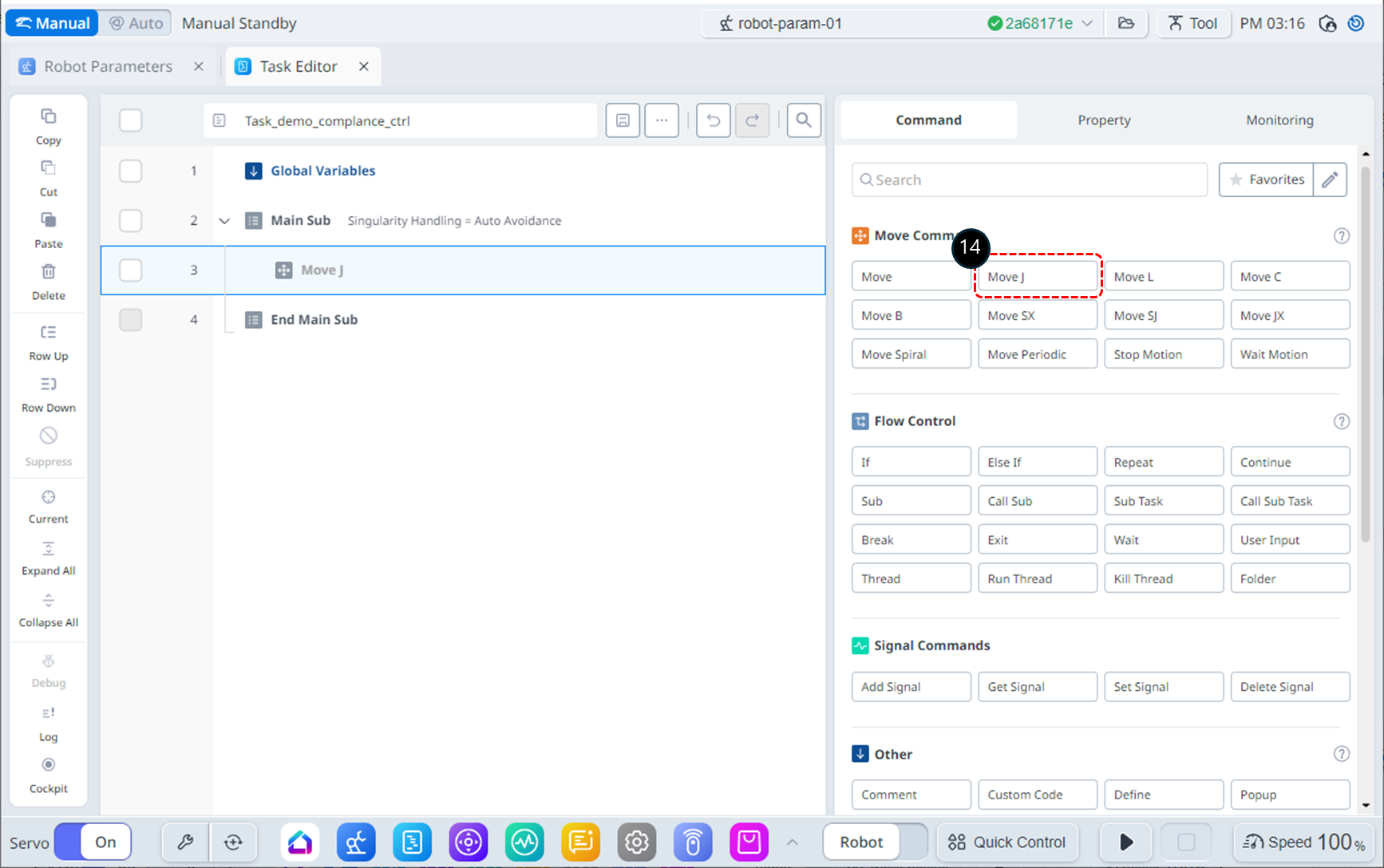
MoveJ 명령어를 추가하십시오. 이 명령어는 로봇의 순응 제어 시작 위치로 이동하는데 사용될 예정입니다.
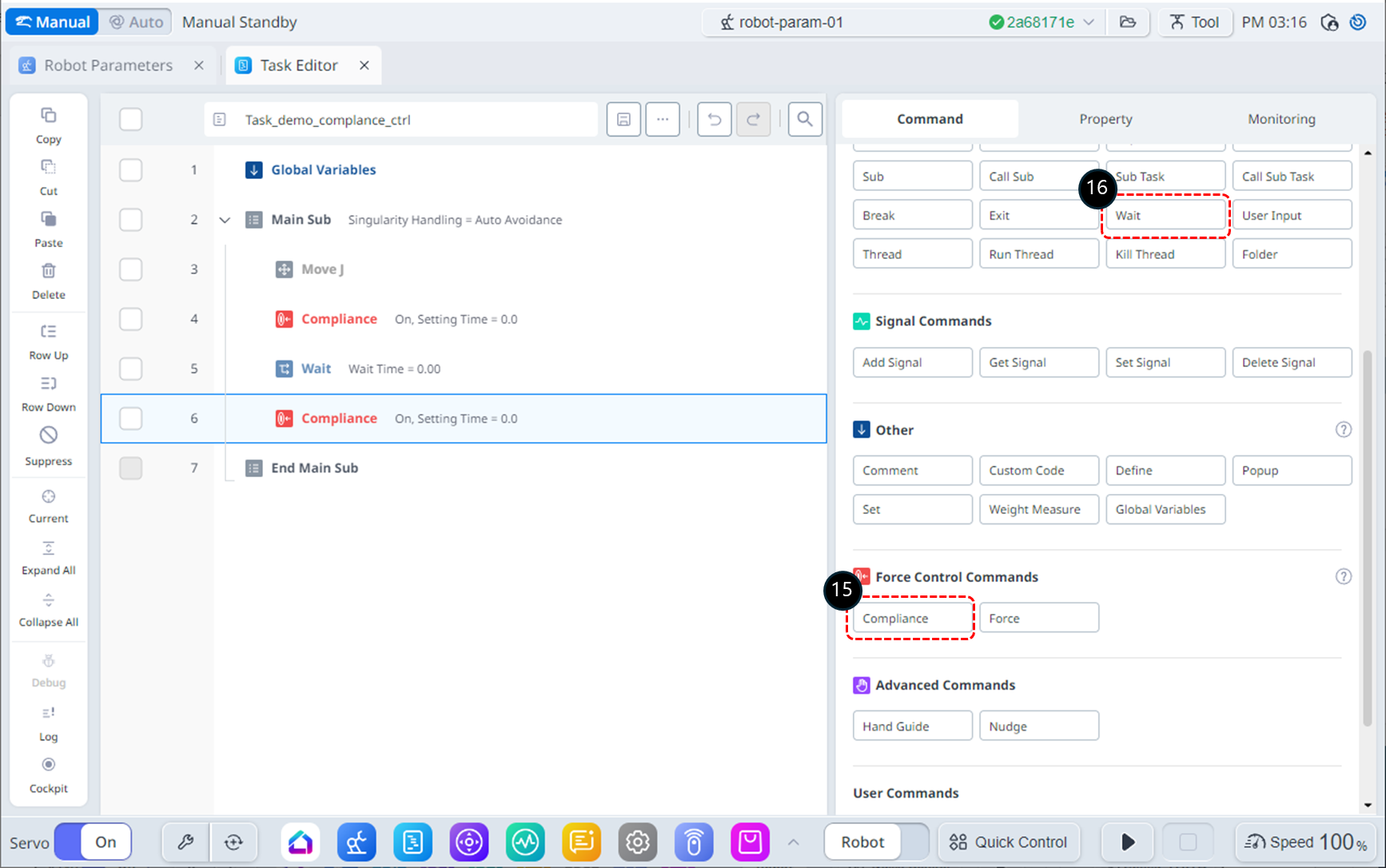
Compliance 명령어를 2개 추가하십시오. 이 명령어는 순응 제어(Compliance Control)을 활성화/비활성화하는데 사용될 예정입니다.
Compliance 명령어 사이에 Wait 명령어를 추가하십시오. 이 명령어는 순응 제어를 유지하기 위해 사용될 예정입니다.
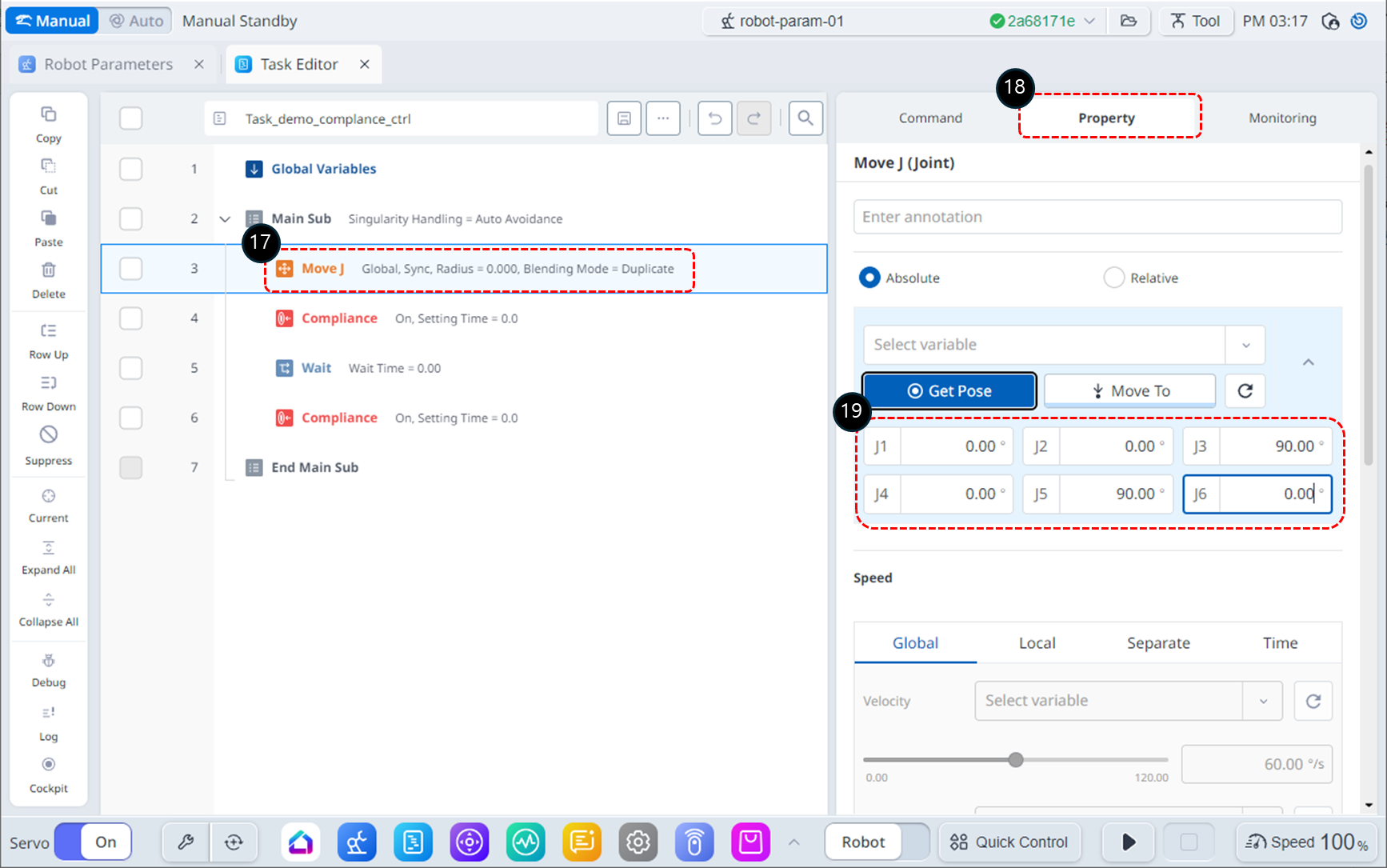
3번 줄의 MoveJ 명령어를 선택하십시오
속성(Property) 탭을 선택하십시오.
MoveJ의 목표 위치를 (0, 0, 90, 0, 90, 0)deg로 수정하십시오. 로봇의 설치 공간에 따라 J1의 각도는 변경해도 상관없습니다.
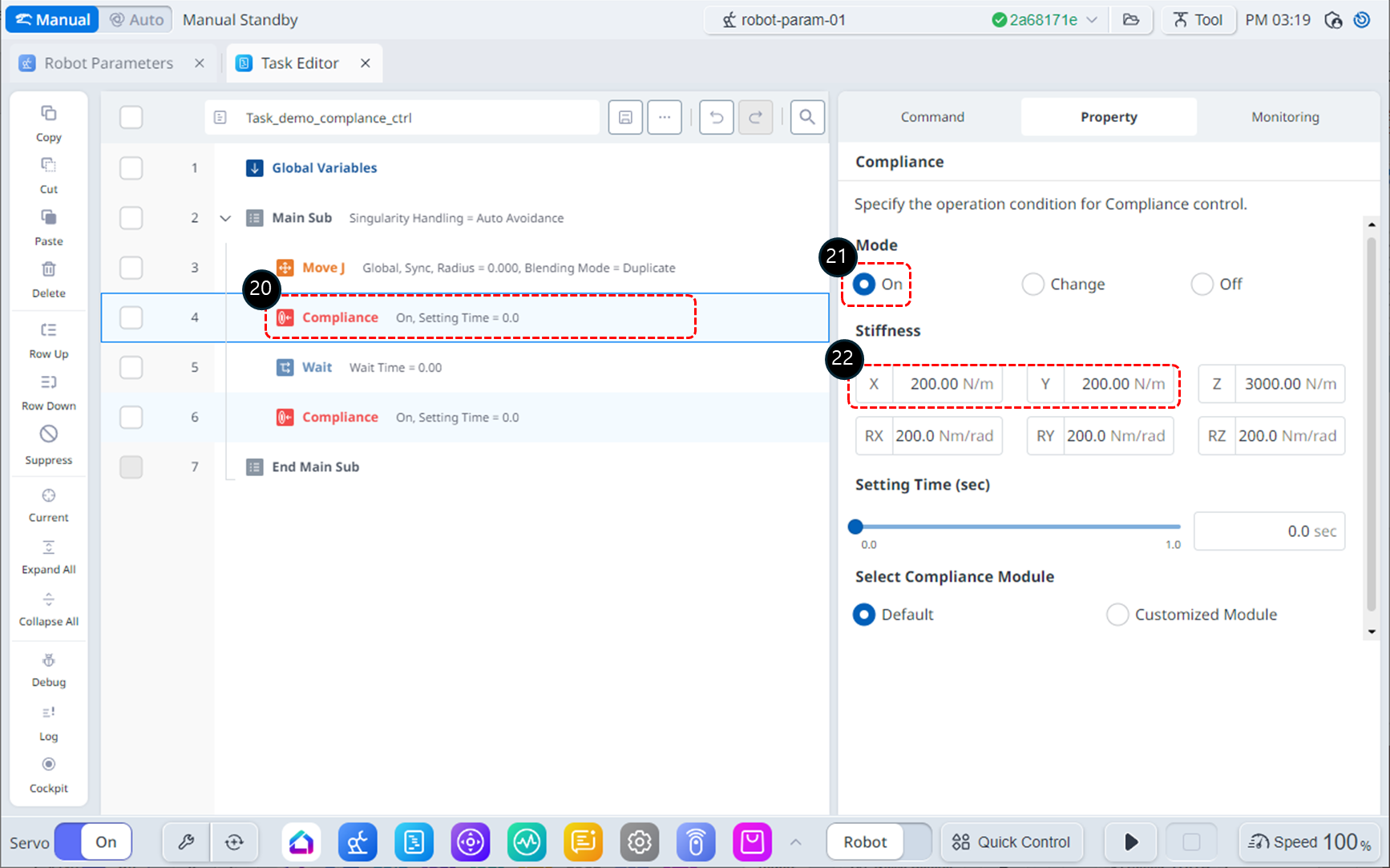
4번 줄의 Compliance 명령어를 선택하십시오.
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode On은 순응 제어를 활성화 합니다.
Mode : On
강성(Stiffness)를 다음과 같이 설정합니다. X, Y 방향의 강성을 낮추어 X, Y 방향으로 조금 더 유연하게 반응하도록 하겠습니다.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (default)
Rx, Ry, Rz : 200 Nm/rad (default)
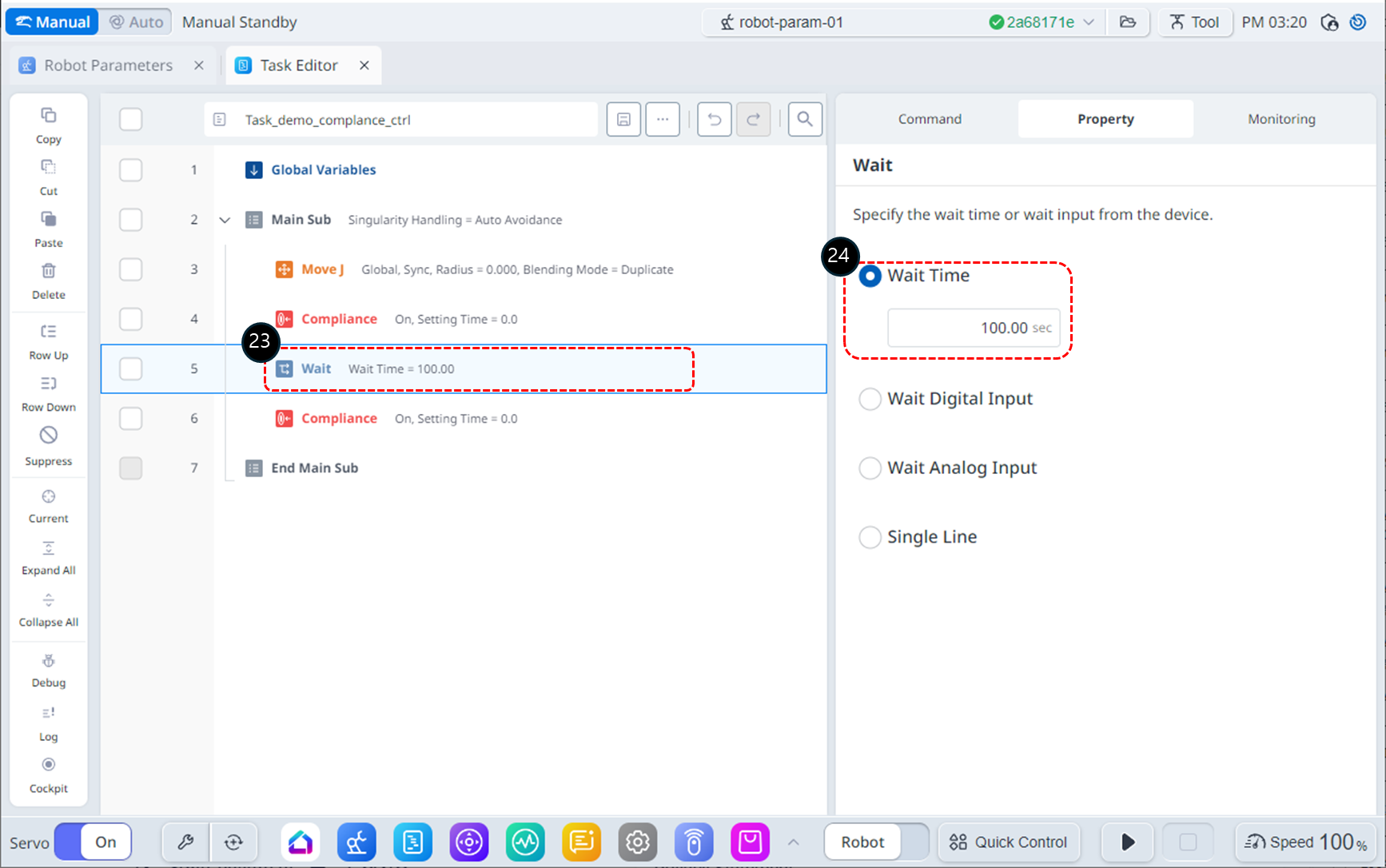
5번 줄의 Wait 명령어를 선택하십시오.
Wait Time을 다음과 같이 설정합니다.
Wait Time : 100 sec
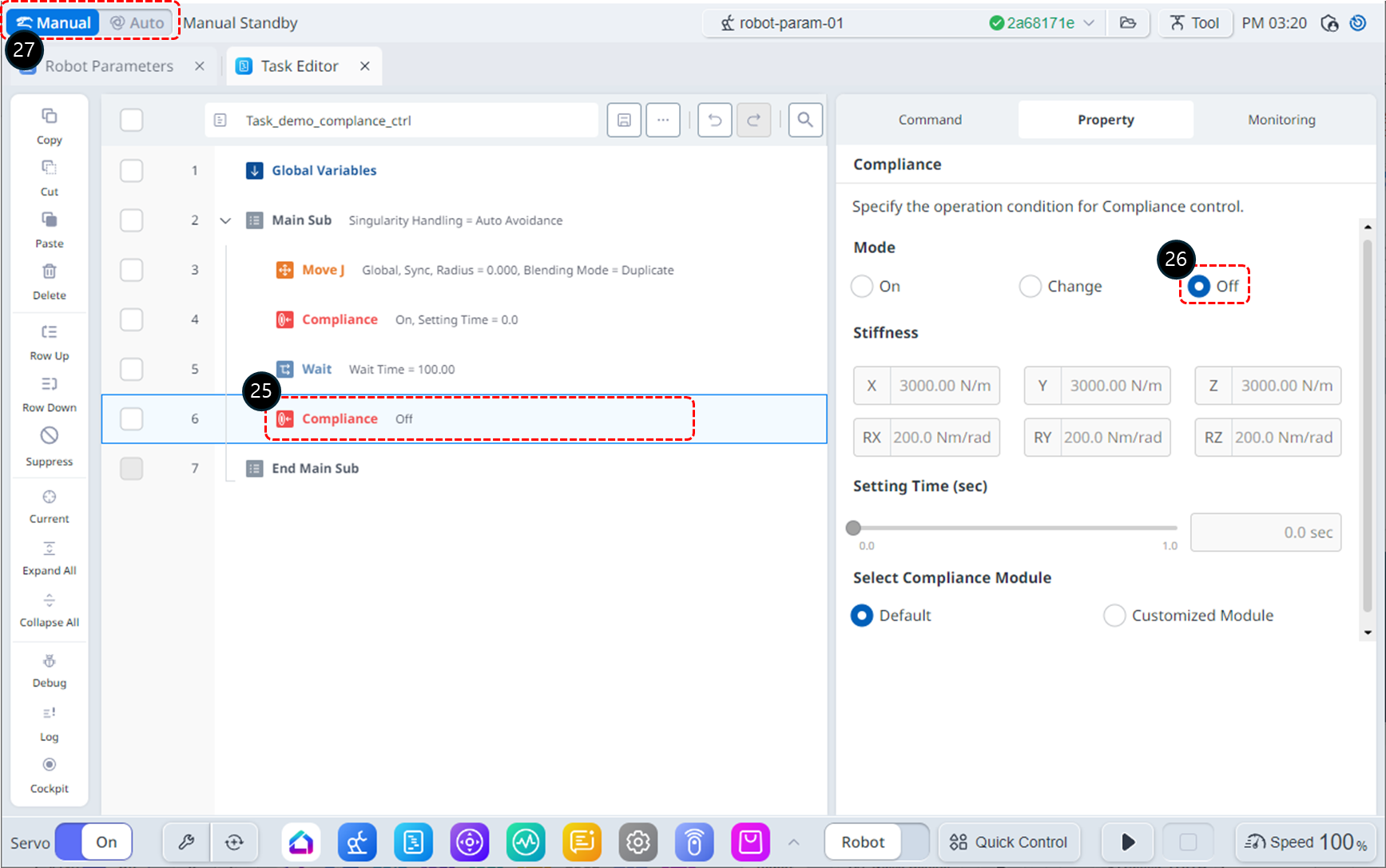
6번 줄의 Compliance 명령어를 선택하십시오.
속성(Property)에서 Mode를 다음과 같이 설정합니다. Mode Off는 순응 제어를 비활성화 합니다.
Mode : Off
로봇의 동작 Mode를 Auto로 변경하십시오. 그러면 속성 탭은 자동으로 Monitering 탭으로 전환됩니다.
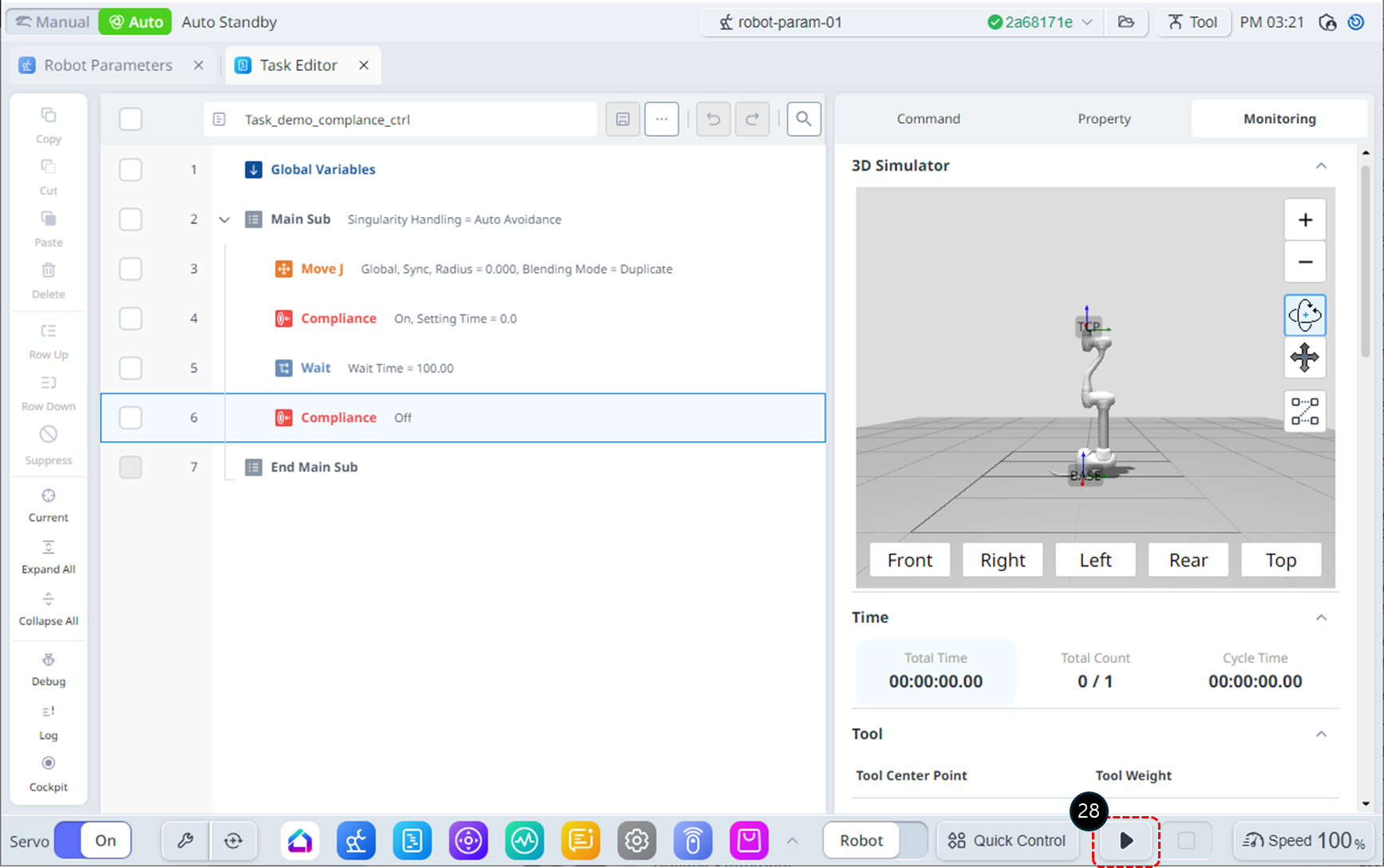
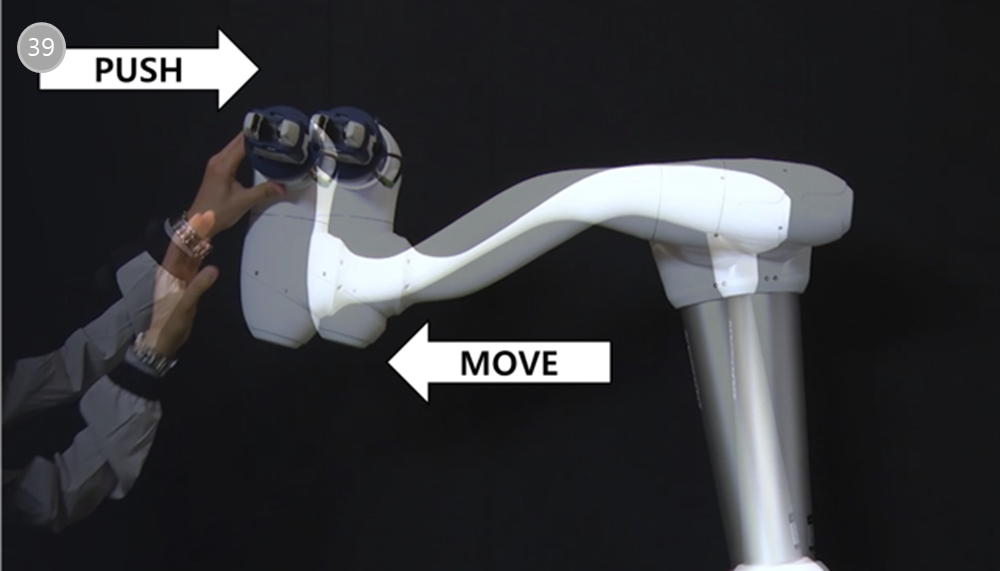
실행 버튼을 누르십시오. 그러면 로봇은 시작 위치로 이동 후 compliance control을 시작하고 100초간 정지해 있습니다. 이때 로봇의 끝단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇은 충돌 에러(혹은 TCP Force Limit 에러)가 발생하면서 멈추게 됩니다.
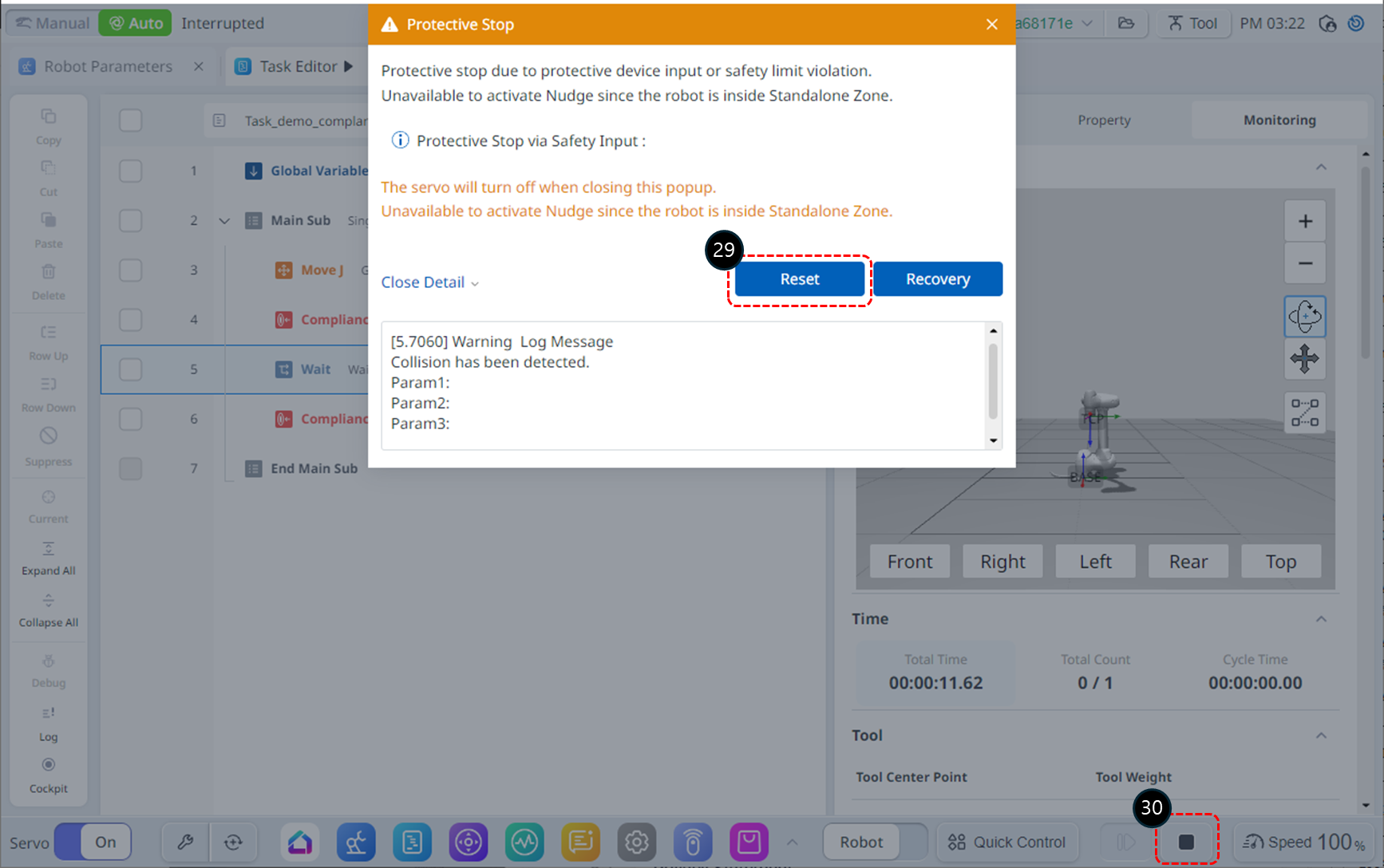
안전 정지 경고 창에서 Reset 버튼을 누르십시오. 태스크 프로그램이 다시 동작합니다.
정지 버튼을 눌러 프로그램을 종료 하십시오.
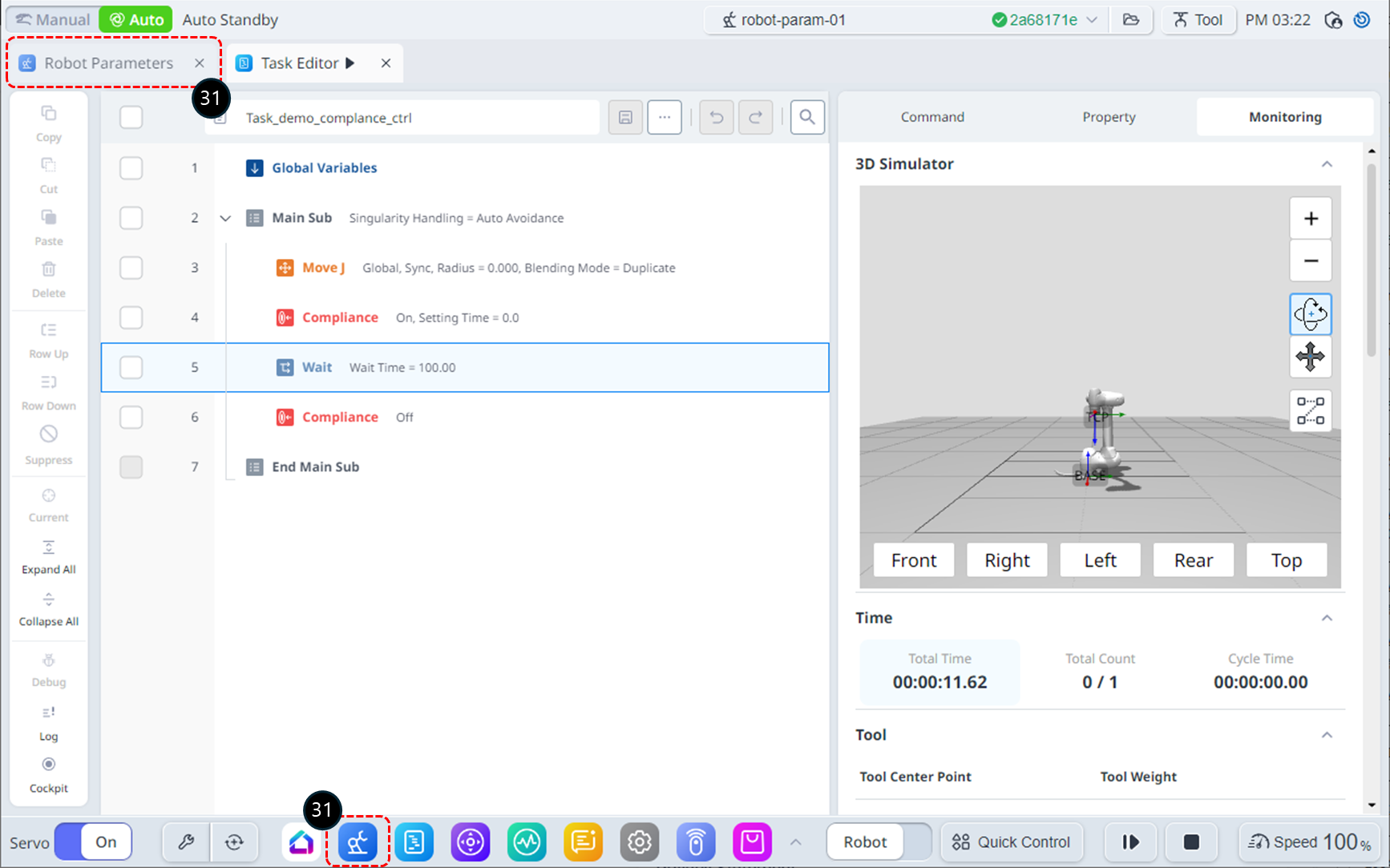
충돌 문제 해결을 위해서는 안전 설정 중 충돌 민감도(Collision Sensitivity)를 낮춰야 합니다.(TCP Force Limit 문제가 있을 경우에는 TCP Force 항목을 높여야함) 하단 메뉴에서 Robot Parameters 모듈을 선택하십시오. 혹은 왼쪽 상단의 Robot parameters 모듈 탭을 선택해도 동일 합니다.
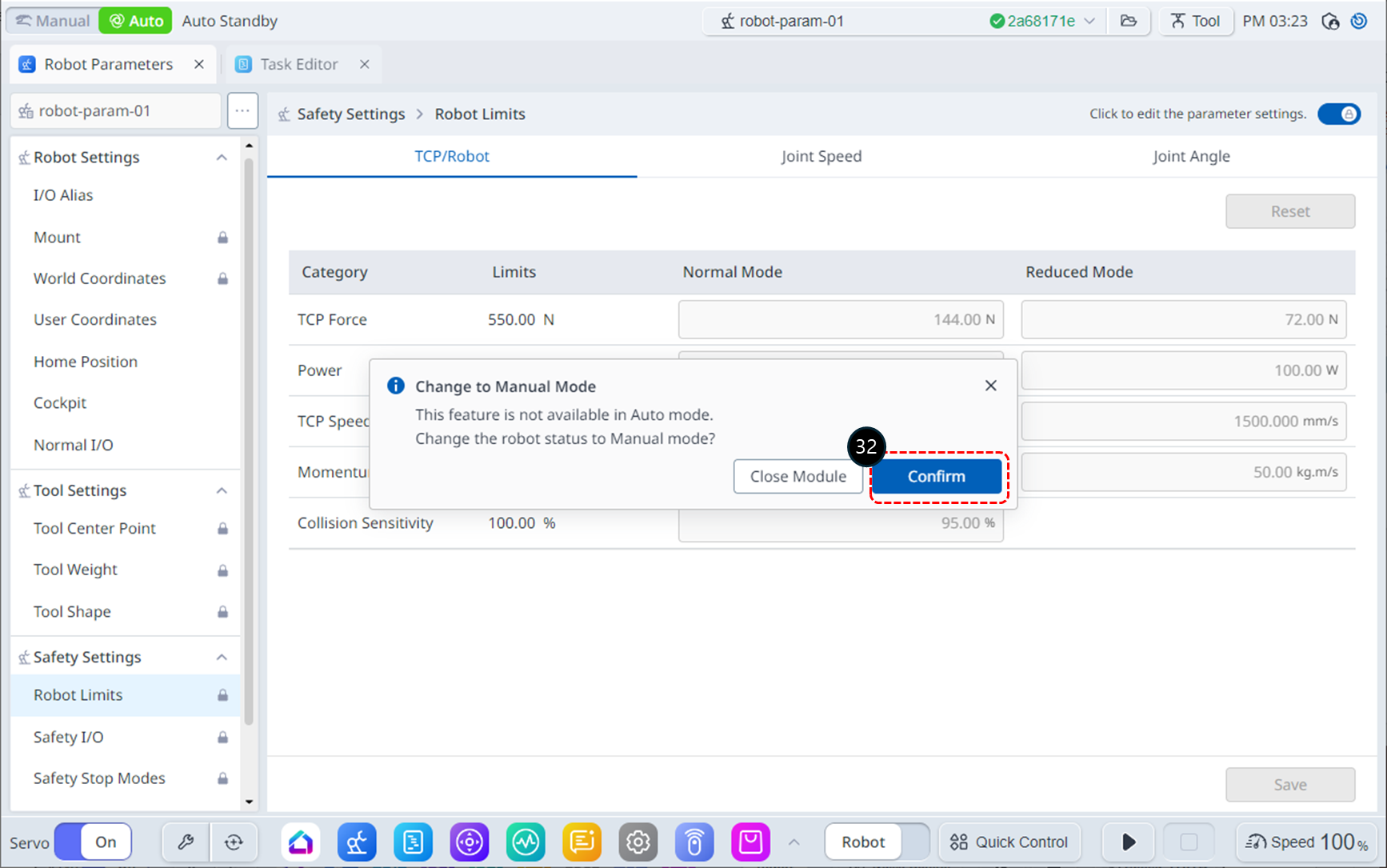
Auto mode에서 Robot parameters 모듈에 접근하여 알림 창이 뜹니다. 확인(Confirm) 버튼을 눌러서 Manual mode로 전환하십시오.
Safety Settings의 Robot Limits를 선택하십시오.
파라미터 편집 가능 상태를 활성화 하십시오. 비밀번호 입력창이 나올 시에는 6~7의 순서를 확인하십시오.
충돌 민감도(Collision Sensitivity)를 50%로 수정하십시오.
설정 저장(Save) 버튼을 누르십시오. 이후 Robot Parameters Review 창이 나올 시에는 수정사항을 확인하신 후에 적용(Apply) 버튼을 누르십시오.
Task Editor 모듈 탭을 선택하십시오.
Task Program 실행을 위해 Auto mode로 변경하십시오.
실행 버튼을 누르십시오. wait 시간 동안 로봇의 끝 단을 잡고 로봇의 몸체 방향으로 천천히 밀어보십시오. 로봇이 미는 힘에 의해 이동했다가 손을 떼면 다시 원래 위치로 복귀합니다.