공간 제한과 구역의 설정
공통 사항
유효 면적(Effective Area)은 내부/외부 중 하나를 선택할 수 있습니다.
모양 유형(Shape Type)은 구, 원기둥, 직육면체, 기울어진 직육면체, 다면상자 중 하나를 선택할 수 있으며 자세한 내용은 공간 제한과 구역의 형태 알아보기를 참고하십시오
공간 제한(Space Limit) 설정하기
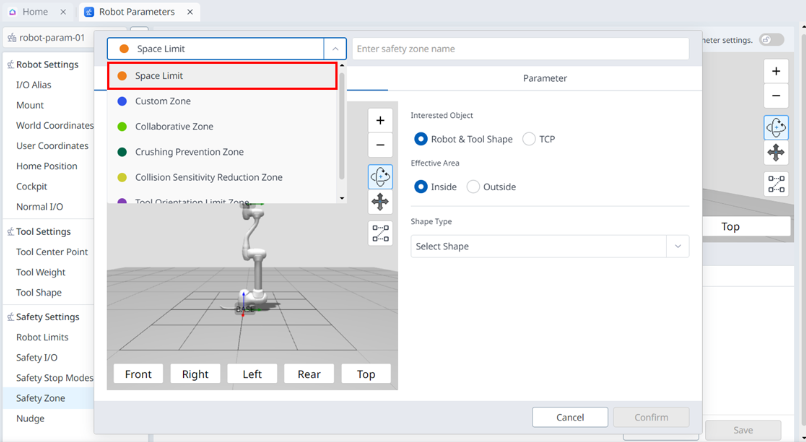
공간 제한(Space Limit)은 로봇의 가장 외곽 영역에 가상 울타리를 설정하는 기능입니다. 공간 제한을 설정하지 않고 로봇을 운용할 수 있지만 안전한 사용을 위해 공간 제한을 설정하는 것을 권장합니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 '공간 제한'을 선택하여 설정할 수 있습니다.
검사 대상(Interested Object)는 로봇 & 툴 모양/공구중심점(TCP) 중 하나를 선택할 수 있습니다.
로봇이 설정한 공간 제한 영역 안에 있어야 정상적으로 설정됩니다.
알아두기
설정 방식에 따라 공간 확장(Space Expansion)의 기본값이 존재합니다.
툴 형상 설정, 검사 대상을 '공구중심점(TCP)'으로 선택 시, TCP 마진값 0mm
툴 형상 설정, 검사 대상을 '로봇 & 툴 모양'으로 선택 시, TCP 마진값 0mm
툴 형상 미설정, 검사 대상을 '공구중심점(TCP)'으로 선택 시, TCP 마진값 0mm
툴 형상 미설정, 검사 대상을 '로봇 & 툴 모양'으로 선택 시, TCP 마진값 60mm
사용자 정의 구역(Custom Zone) 설정하기
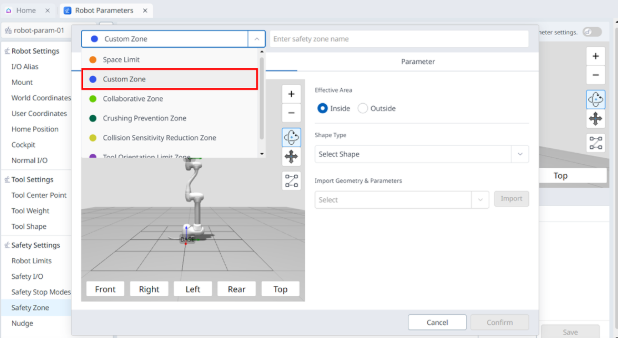
사용자 정의 구역(Custom Zone)은 안전 매개변수를 자유롭게 설정할 수 있는 가장 유연한 안전 구역입니다. 로봇 제한, 안전 정지 모드, 관절 속도 및 각도 제한 등 모든 설정을 요구에 맞게 구성할 수 있습니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 ‘사용자 정의 구역’을 선택하여 설정할 수 있습니다.
알아두기
TCP가 여러 영역이 겹치는 위치에 있는 경우, 다음과 같은 규칙이 각 안전 기능에 대해 개별적으로 적용됩니다.
정상모드(Normal Mode)
높은 우선 순위 구역으로 설정된 구역이 없다면, 겹쳐진 구역 중 가장 제한된 안전 제한 값이 검사 기준 값이 됩니다.
높은 우선 순위 구역으로 설정된 구역이 1개 라면, 그 구역의 제한 값이 검사 기준 값이 됩니다.
높은 우선 순위 구역으로 설정된 구역이 2개 이상이라면, 설정된 구역 중 가장 완화된 안전 제한 값이 검사 기준이 됩니다.
감속모드(Reduce Mode)
높은 우선 순위 구역으로 설정된 구역이 없다면, 겹쳐진 구역 중 가장 제한된 안전 제한 값이 검사 기준 값이 됩니다.
높은 우선 순위 구역으로 설정된 구역이 1개라면, 그 구역의 오버라이드 옵션(Override Option)에 따라 검사 기준 값이 결정됩니다.
오버라이드 옵션이 체크되지 않았다면, 높은 우선 순위 구역과 전역-감소 제한(Global-Reduced Limit) 중 가장 제한된 안전 제한 값이 검사 기준 값이 됩니다.
오버라이드 옵션이 체크됐다면, 높은 우선 순위 구역이 검사 기준 값이 됩니다.
높은 우선 순위 구역으로 설정된 구역이 2개 이상인 경우, 그 구역의 오버라이드 옵션(Override Option)에 따라 검사 기준 값이 결정됩니다.
높은 우선 순위 구역 중 하나라도 오버라이드 옵션이 체크되지 않았다면, 오버라이드 옵션이 체크되지 않은 높은 우선 순위 구역과 전역-감소 제한(Global-Reduced Limit) 중 가장 제한된 안전 제한 값이 검사 기준 값이 됩니다.
모든 높은 우선 순위 구역의 오버라이드 옵션이 체크됐다면, 높은 우선 순위 구역 중 가장 완화된 안전 제한 값이 검사 기준이 됩니다.
협동 작업 구역(Collaborative Zone) 설정하기
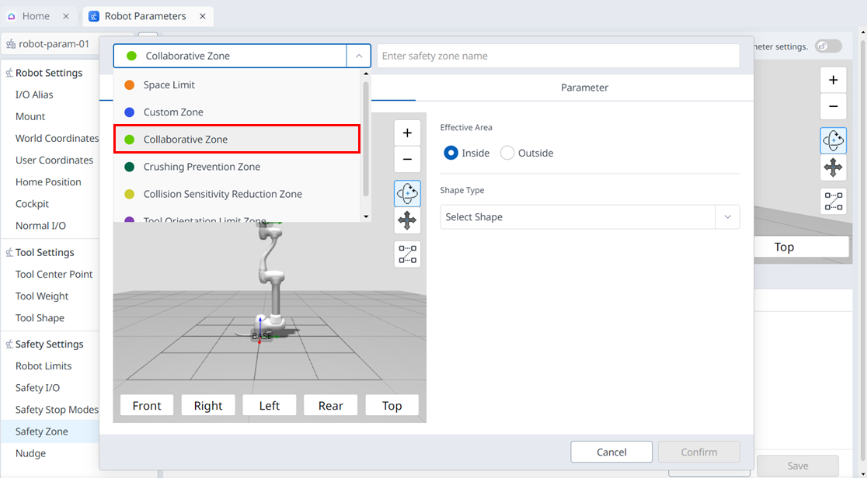
협동 작업 구역(Collaborative Zone)은 로봇과 안전하게 함께 작업할 수 있도록 설계된 구역입니다. 근접 작업에 필요한 감속률 등의 로봇 제한, 안전 정지 모드 설정을 제공합니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 ‘협동 작업 구역’을 선택하여 설정할 수 있습니다.
협착 방지 구역(Crushing Prevention Zone) 설정하기
협착 방지 구역(Crushing Prevention Zone)은 로봇과 다른 물체 사이에서 발생할 수 있는 협착 위험을 방지하기 위한 구역입니다. 이 구역에서는 충돌 및 외력 제한 위반 시, 안전 정지 모드가 RS1(Reflex Stop)으로 고정되어 있고 충돌 민감도가 100%로 설정되어, 충돌 감지 시 외력에 최대한 민감하게 반응한 후 플로팅 리액션을 통해 로봇을 안전하게 정지시킵니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 ‘협착 방지 구역’을 선택하여 설정할 수 있습니다.
충돌 민감도 감소 구역(Collision Sensitivity Reduction Zone) 설정하기
충돌 민감도 감소 구역(Collision Sensitivity Reduction Zone)은 로봇이 다양한 재료나 표면과 작업할 때 충돌 감지 민감도를 조정하는 구역입니다. 힘과 충돌 민감도 설정을 제공합니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 ‘충돌 민감도 감소 구역’을 선택하여 설정할 수 있습니다.
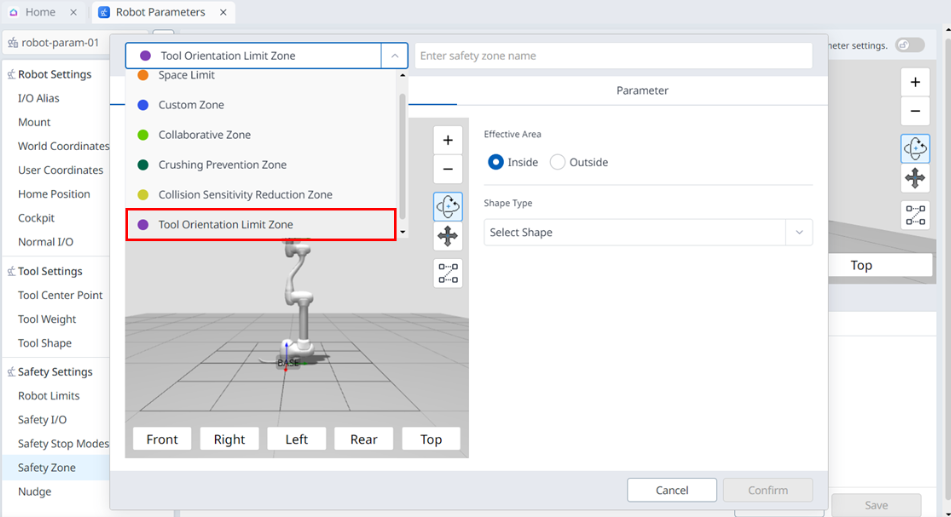
툴 방향 전환 제한 구역(Tool Orientation Limit Zone) 설정하기
툴 방향 제한 구역(Tool Orientation Limit Zone)은 TCP의 방향을 제한하는 구역입니다. TCP가 특정 방향을 향하도록 보장하며, 방향과 각도 마진을 정의하여 안전하지 않은 방향을 향하지 않도록 방지합니다.
Robot Parameters > 안전 구역 > 추가 > 팝업 왼쪽 상단에서 ‘툴 방향 전환 제한 구역’을 선택하여 설정할 수 있습니다.