
svm_get_marker_offset_pose(cpos, offset, euler_mode)
기능
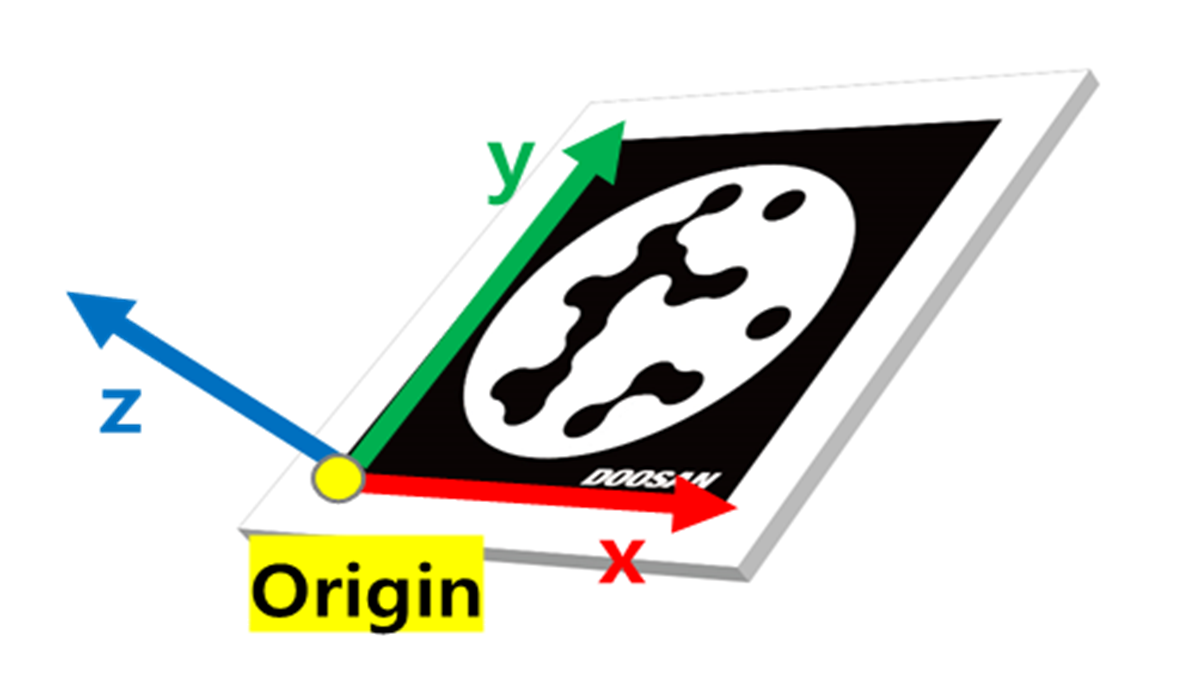
Landmark 원점으로부터 offset 만큼 떨어진 위치와 회전각도를 로봇 좌표 기준으로 연산합니다.
인수
| 인수명 | 자료형 | 기본값 | 설명 |
|---|---|---|---|
cpos | list[Tx, Ty, Tz, Rx, Ry, Rz] | 카메라 좌표 기준의 Landmark pose | |
offset | list[Tx, Ty, Rz] | Landmark origin으로부터 떨어진 위치와 회전각도 | |
euler_mode | boolean | 연산될 로봇좌표 기준의 Landmark pose의 orientation에 대해 “True”일때는 ZYZ, “False”일때는 XYZ |
리턴
| 값 | 자료형 | 설명 |
|---|---|---|
rpos | list[Tx, Ty, Tz, Rz, Ry, Rz'] 또는 list[Tx, Ty, Tz, Rx, Ry, Rz] | 로봇좌표 기준의 Landmark pose 또는 offset이 설정된 Landmark pose |
-1 | Int | 실패 – 측정데이터 없음 또는 입력 변수 오류 |
예제
PY
svm_connect() # Connect to vision
offset = [10,-20, 45]
euler_mode = True
rpos = svm_get_marker_offset_pose(cpos, offset, euler_mode)
tp_popup("Landmark with respect to Robot={0}".format(rpos))
svm_disconnect() # Disconnect to vision