
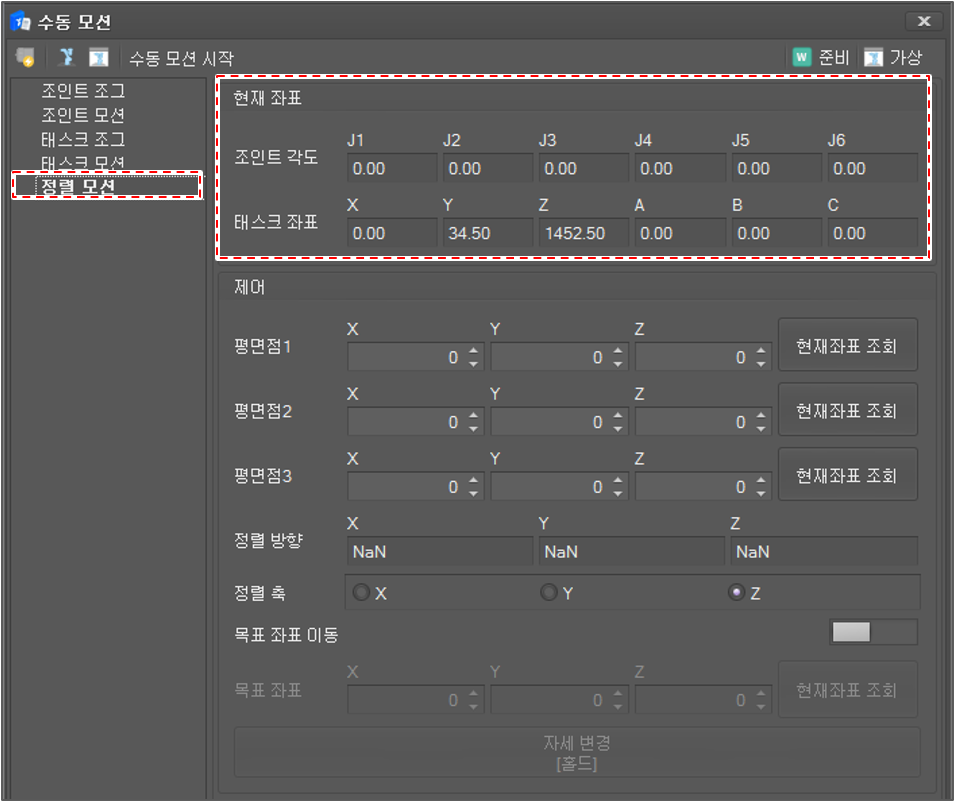
정렬 모션
수동 모션 목록에서 정렬 모션을 선택하십시오. 현재 조인트 각도와 TCP 위치가 표시되며 100 밀리세컨드 간격으로 업데이트됩니다.
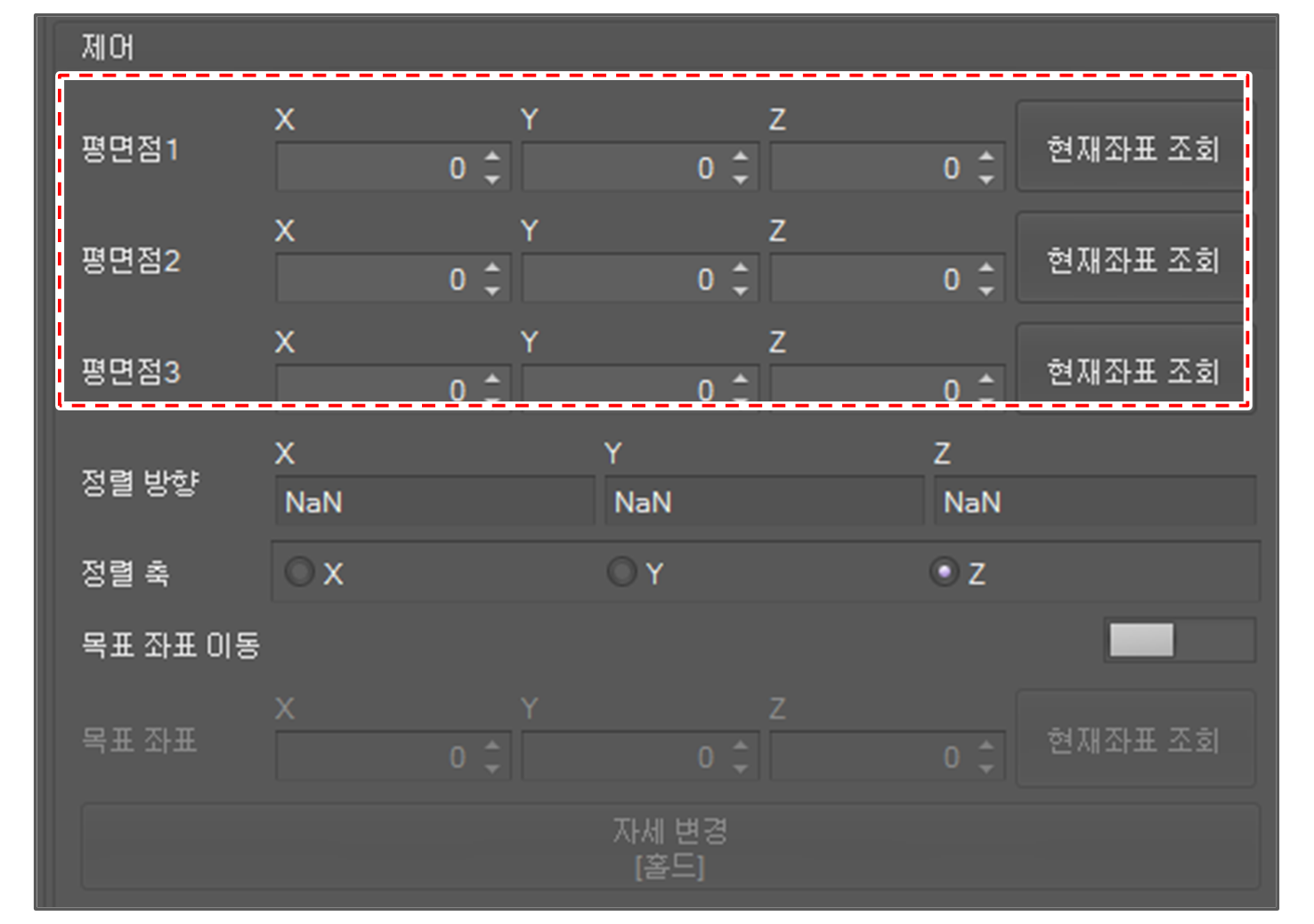
평면 점 설정
3개의 평면 점을 설정하여 정렬방향을 결정하십시오. 정렬 방향은 3개의 평면 점이 정의하는 평면의 법선 벡터입니다.
현재 포즈를 얻으려면 현재좌표 조회 버튼을 클릭하십시오.
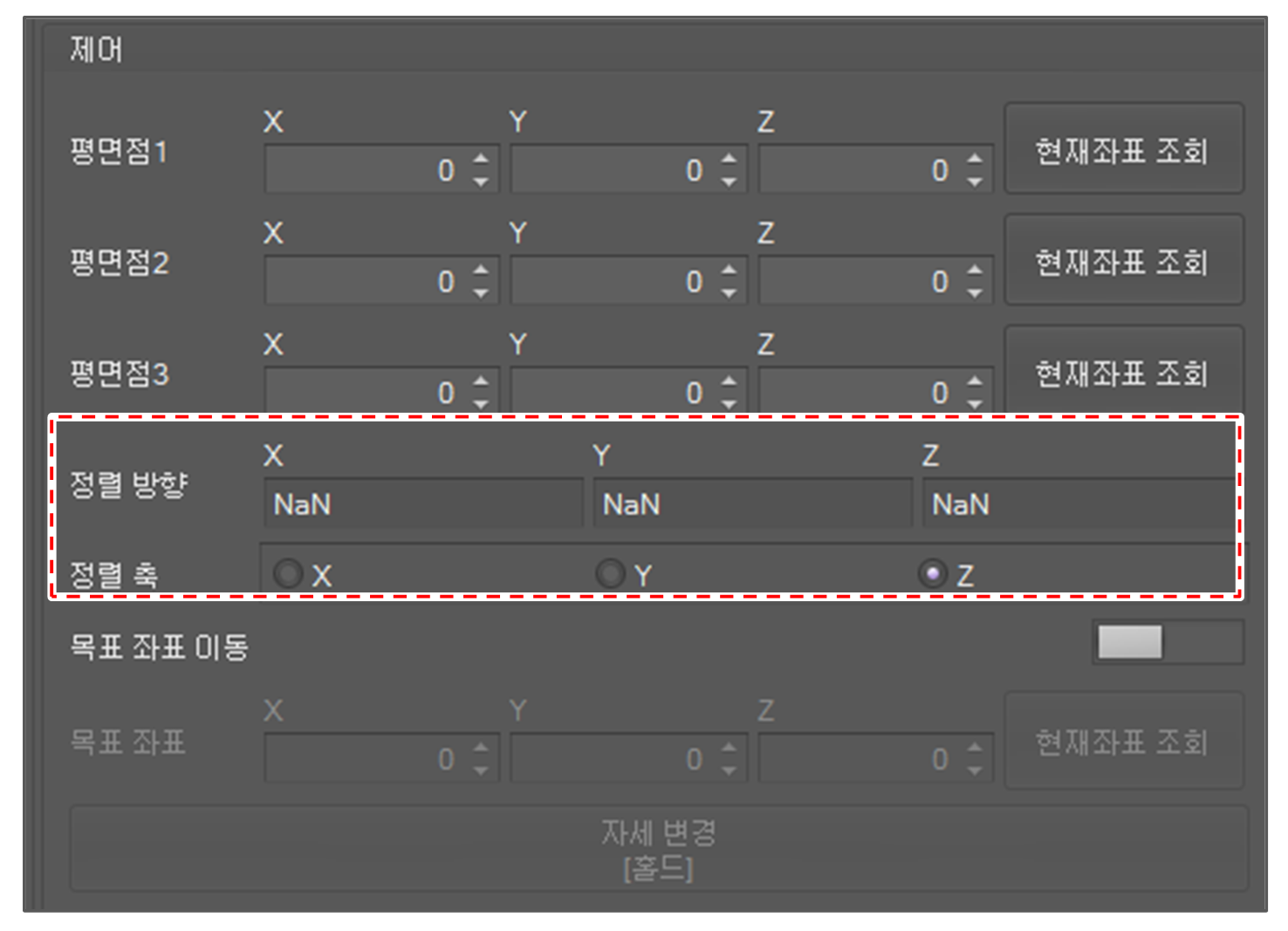
정렬 축 선택
정렬 축을 선택하십시오. Z축을 선택하면 툴의 Z축이 정렬방향에 정렬됩니다. X축을 선택하면 툴의 X축이 정렬 방향에 맞춰 정렬됩니다.
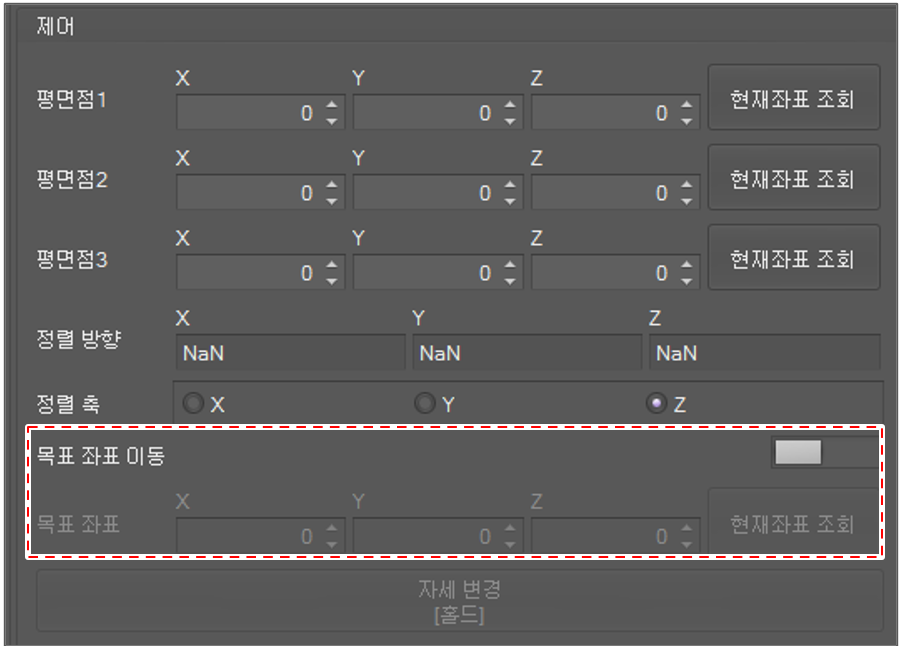
목표 좌표 이동 선택(옵션)
목표 좌표 이동 옵션 스위치가 켜진 경우 로봇은 툴 방향을 변경하면서 목표 위치로 이동합니다.
목표 좌표 이동 옵션 스위치가 꺼진 경우 로봇은 위치 이동 없이 툴의 방향을 바꿉니다.
동작 시작
자세 변경 버튼을 누르면 로봇은 버튼을 놓을 때까지 툴의 방향을 바꿉니다.
