
수동 모션
수동 모션을 수동으로 제어하려면 메인 메뉴에서 컨트롤을 선택한 후 수동 모션 버튼을 클릭하십시오.
우측의 조인트 조그, 조인트 모션, 태스크 조그, 태스크 모션, 정렬 모션을 선택할 수 있습니다.
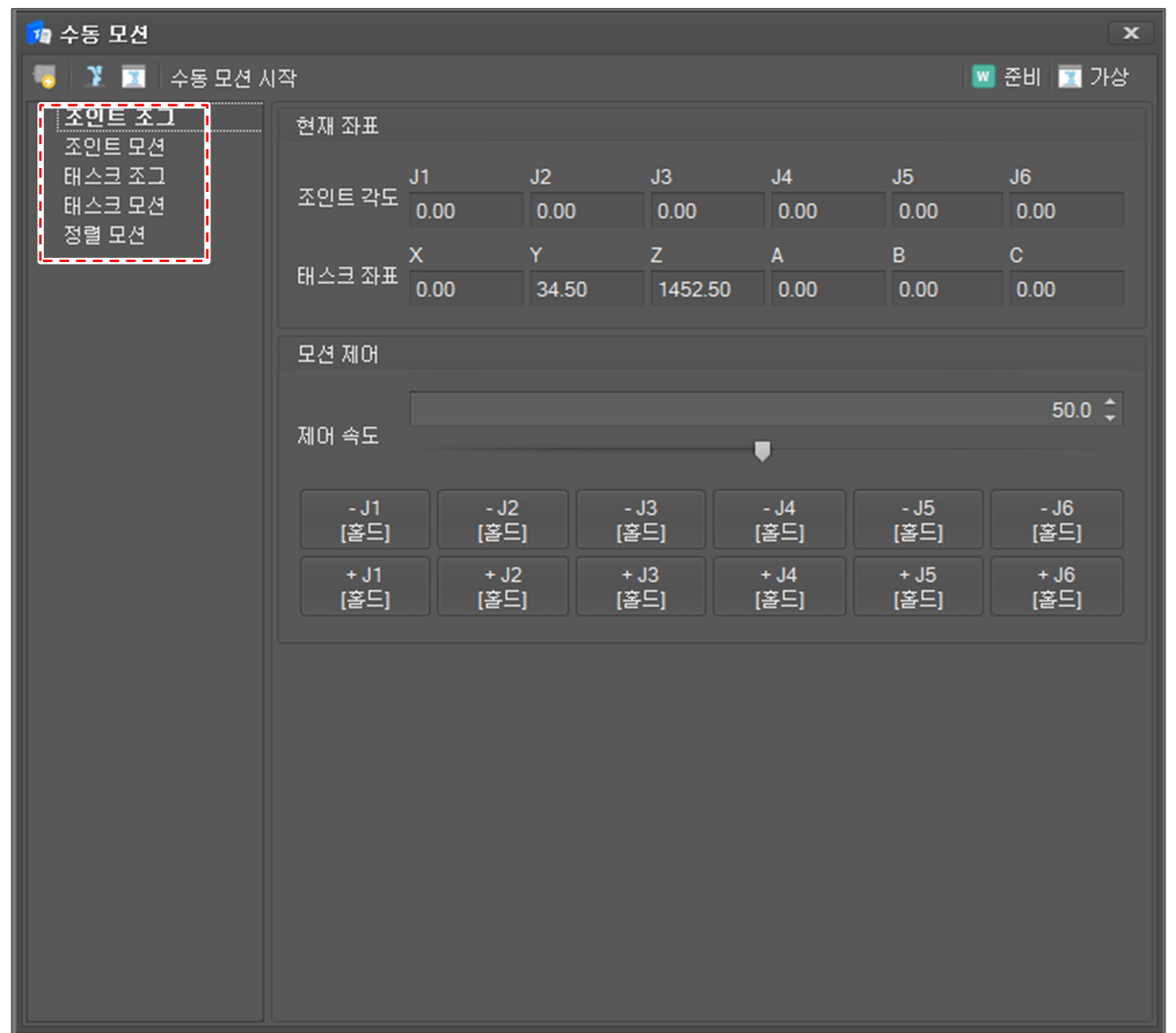
또한 상단 좌측의 버튼을 사용하여 서보 온, 로봇모드/가상모드 설정을 할 수 있습니다.
더불어 상단 우측의 아이콘을 통해 현재 제어 상태 및 시스템 모드 확인도 가능합니다.
모든 수동 동작은 사용자의 홀드 투 런 동작에 의해 실행됩니다. 홀드 투 런의 의미는 로봇이 오직 사용자가 조작 버튼을 누르고 있는 상태에서만 움직인다는 것을 의미합니다.
만약 사용자가 버튼 누르기를 해제하면 로봇은 즉시 멈춥니다.
모션 제어에서 모든 조인트 각도 값은 degree 단위로 표시되고 속도는 degree/second 단위로 표시됩니다.
태스크 포즈의 경우 변환 부분 (X, Y, Z 위치) 가 mm 단위로 표시되고 방향 부분(A, B, C 방향)이 각도 단위로 표시됩니다. 태스크 속도의 경우 변환 부분의 속도는 mm/second 단위로 표시되고 방향 부분의 속도는 degree/second 단위로 표시됩니다.