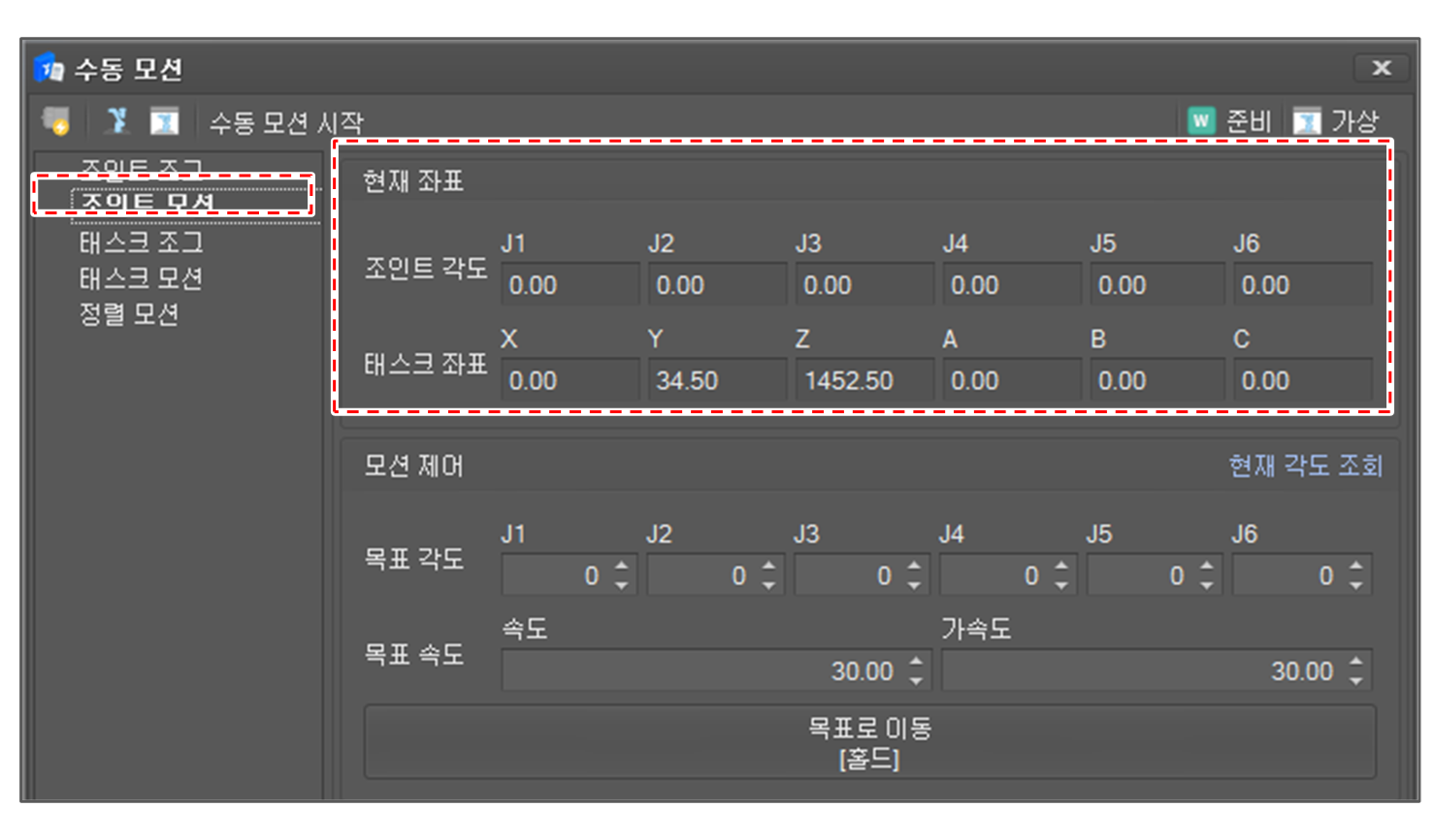
조인트 모션
수동 모션 목록에서 조인트 모션을 선택하십시오. 현재 조인트 각도와 TCP 위치가 표시되며 100 밀리세컨드 간격으로 업데이트됩니다.
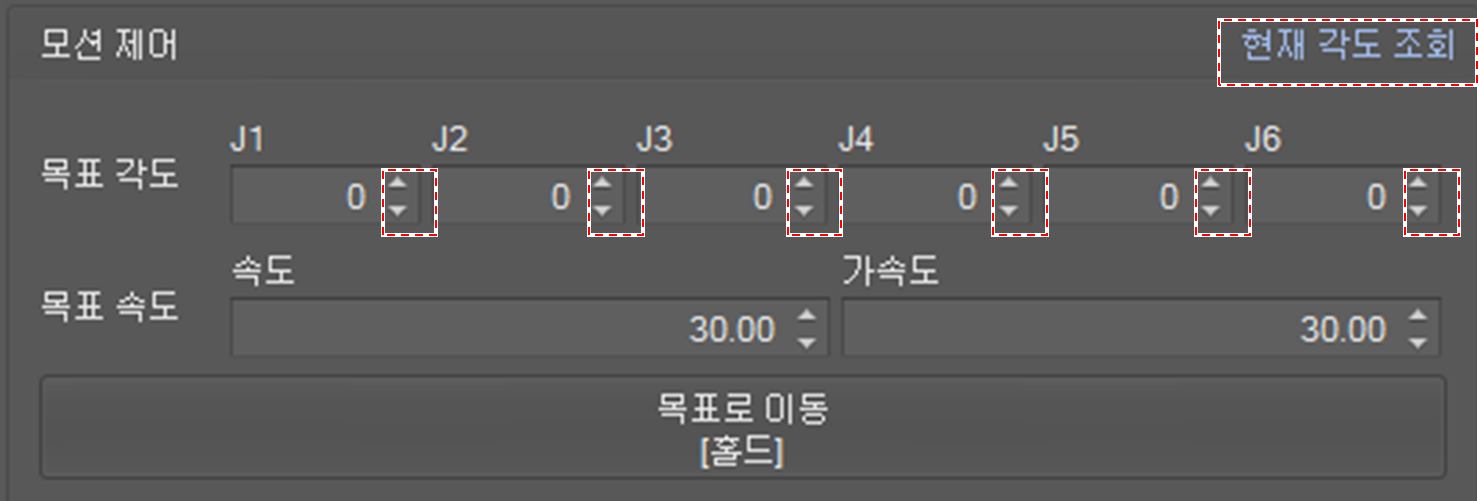
목표 조인트 각도 설정
목표 각도를 설정하려면 값을 입력하거나 스핀 버튼을 클릭하십시오.
- 현재 각도를 목표 조인트 각도 필드에 불러오려면 현재 각도 조회 버튼을 클릭하십시오.
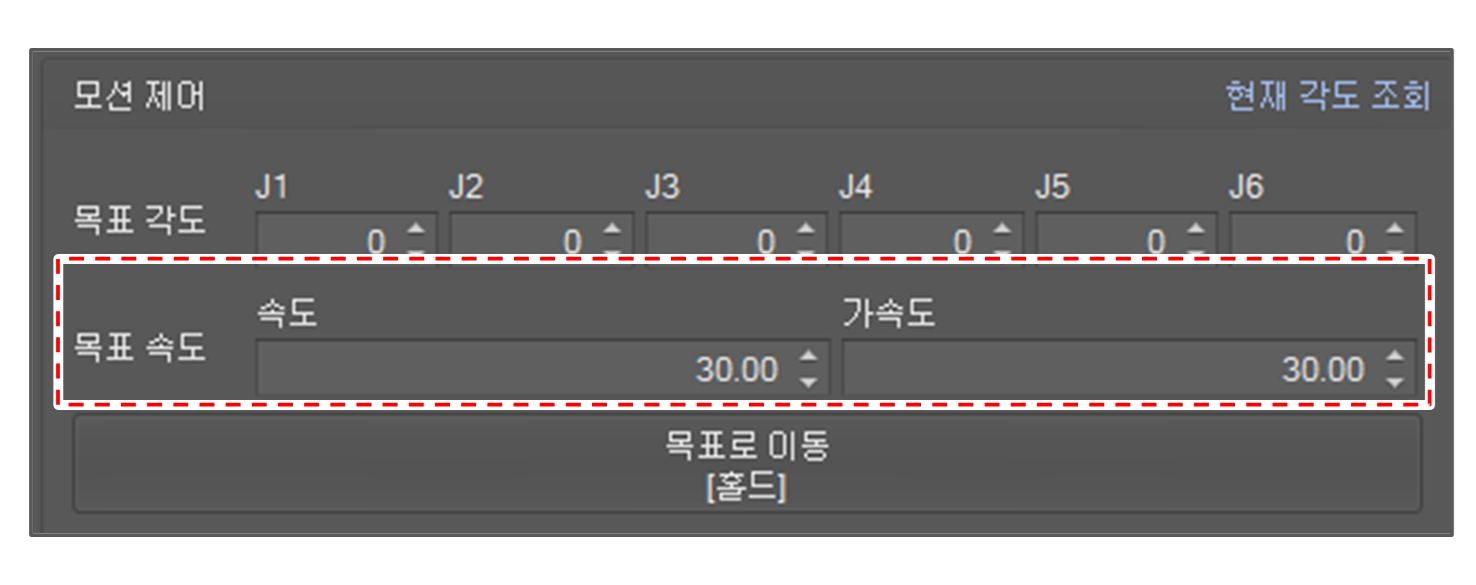
속도 및 가속도 설정
속도와 가속도를 설정하려면 값을 입력하거나 스핀 단추를 클릭하십시오.
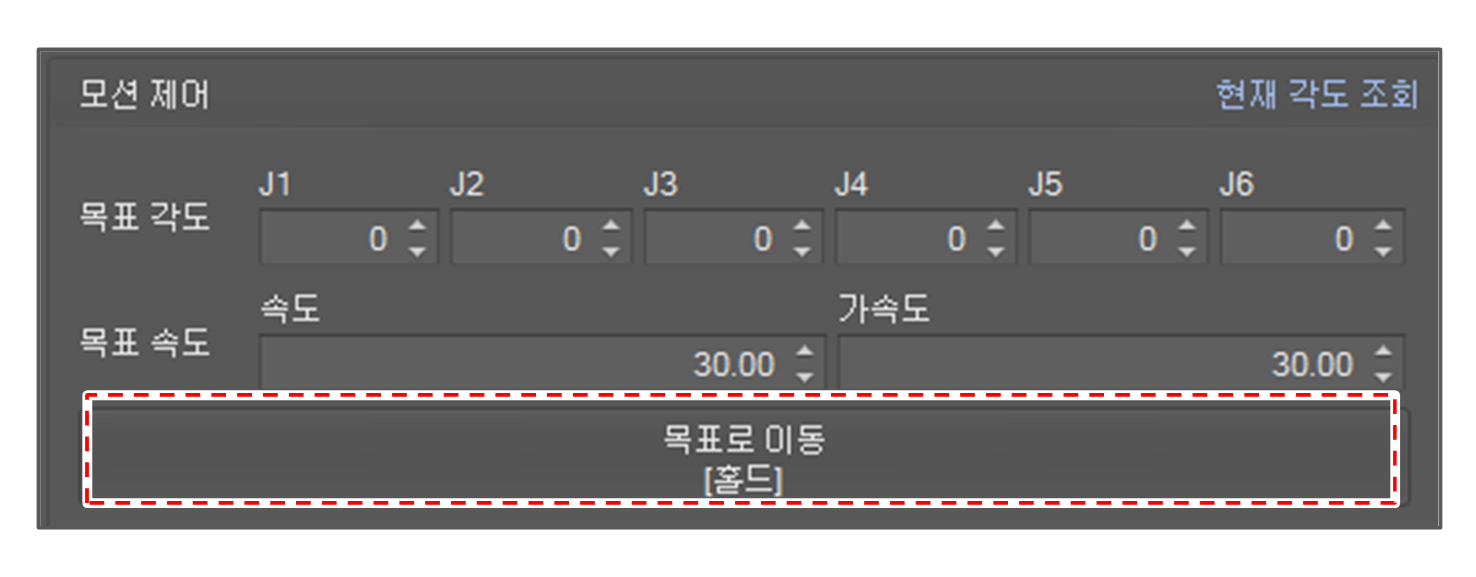
동작 시작
목표로 이동 버튼을 클릭하면 로봇이 ‘MoveJ’를 통해 목표 각도로 이동합니다. 버튼을 놓으면 로봇은 멈춥니다.